差角函数差角矩阵位置编码
记忆小技巧(“正弦同号、余弦异号”)
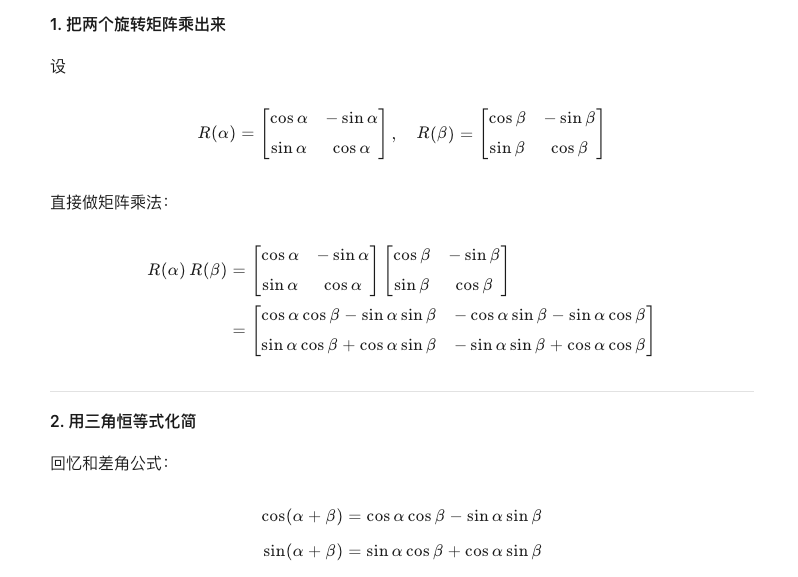
- 正弦加法公式
sin(α+β)=sinαcosβ+cosαsinβ - 余弦加法公式
cos(α+β)=cosαcosβ−sinαsinβ - 差角形式(把 β 换成 −β 即可得到)
sin(α−β)=sinαcosβ−cosαsinβ
cos(α−β)=cosαcosβ+sinαsinβ
矩阵
证明旋转矩阵
一、二维平面:把“旋转”翻译成“线性变换”
问题描述
把平面上任意一点 P(x, y) 绕原点逆时针旋转角度 θ,得到新点 P′(x′, y′)。
我们要找 2×2 矩阵 R,使得
[x′, y′]ᵀ = R [x, y]ᵀ。
先把点写成极坐标
x = r cosφ, y = r sinφ.
旋转 θ 后,极角从 φ → φ+θ,而半径 r 不变。
故
x′ = r cos(φ+θ)
y′ = r sin(φ+θ).
用加法公式展开
cos(φ+θ) = cosφ cosθ − sinφ sinθ
sin(φ+θ) = sinφ cosθ + cosφ sinθ
代入得
x′ = r(cosφ cosθ − sinφ sinθ) = (r cosφ) cosθ − (r sinφ) sinθ = x cosθ − y sinθ
y′ = r(sinφ cosθ + cosφ sinθ) = (r sinφ) cosθ + (r cosφ) sinθ = y cosθ + x sinθ.
写成矩阵乘法
[x′] [ cosθ −sinθ ] [x]
[y′] = [ sinθ cosθ ] [y].
于是
R(θ) = [ cosθ −sinθ
sinθ cosθ ].
验证
基向量 e₁ = (1,0) → 旋转后 (cosθ, sinθ),正是矩阵第一列。
基向量 e₂ = (0,1) → 旋转后 (−sinθ, cosθ),正是矩阵第二列。
线性变换完全由基向量的像决定,故矩阵正确。
验证
基向量 e₁ = (1,0) → 旋转后 (cosθ, sinθ),正是矩阵第一列。
基向量 e₂ = (0,1) → 旋转后 (−sinθ, cosθ),正是矩阵第二列。
线性变换完全由基向量的像决定,故矩阵正确。
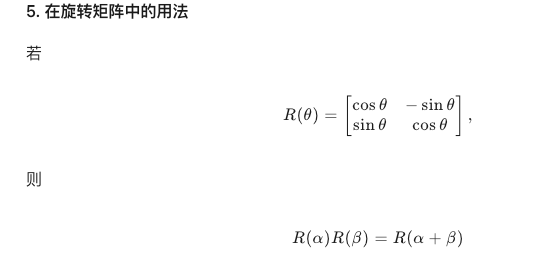
3. 旋转矩阵的性质
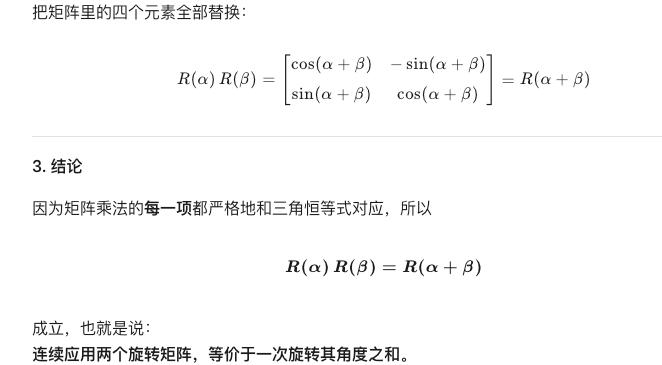
R(α)R(β)=R(α+β)
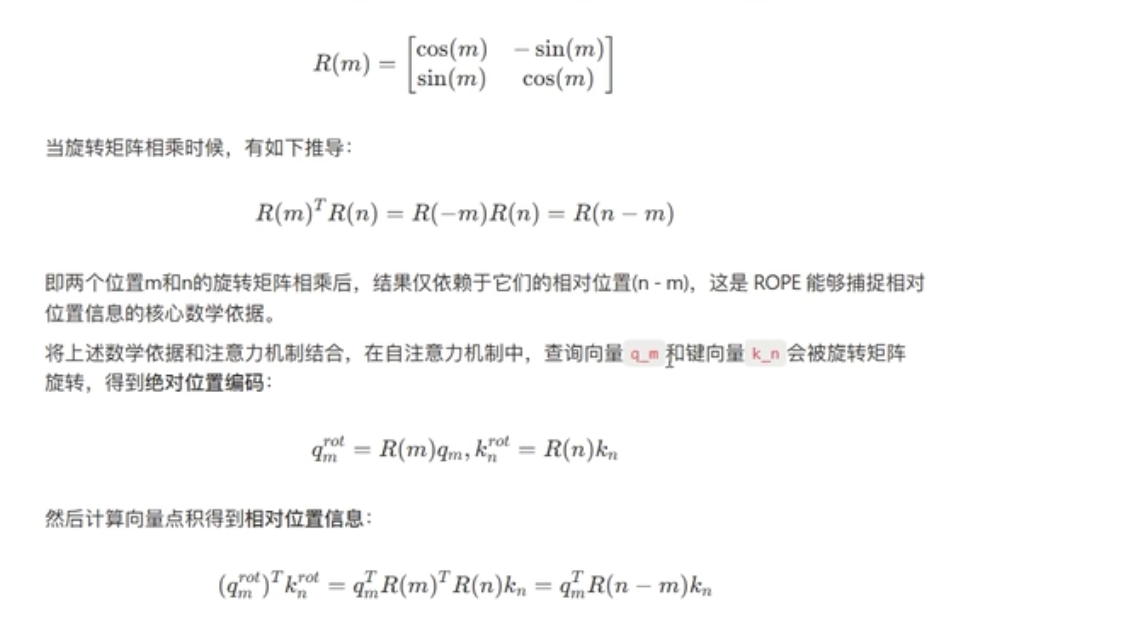
二维旋转矩阵的“乘法对应角度相加”并不是凭空规定的,而是可以从三角恒等式严格推导出来的。
位置编码