建筑兔零基础Arduino自学记录100|简易折纸机器人-17
继感应垃圾桶之后,继续来尝试舵机的使用。本次目的:折纸+会动的
首先找一个动物来折一下,考虑有放舵机的位置。选了螃蟹~
最简单的螃蟹折纸教程
叠好之后找出舵机来试试能不能动~用之前这段代码建筑兔零基础Arduino自学记录78|舵机周期性自动摆-12_arduino舵机代码attach-CSDN博客
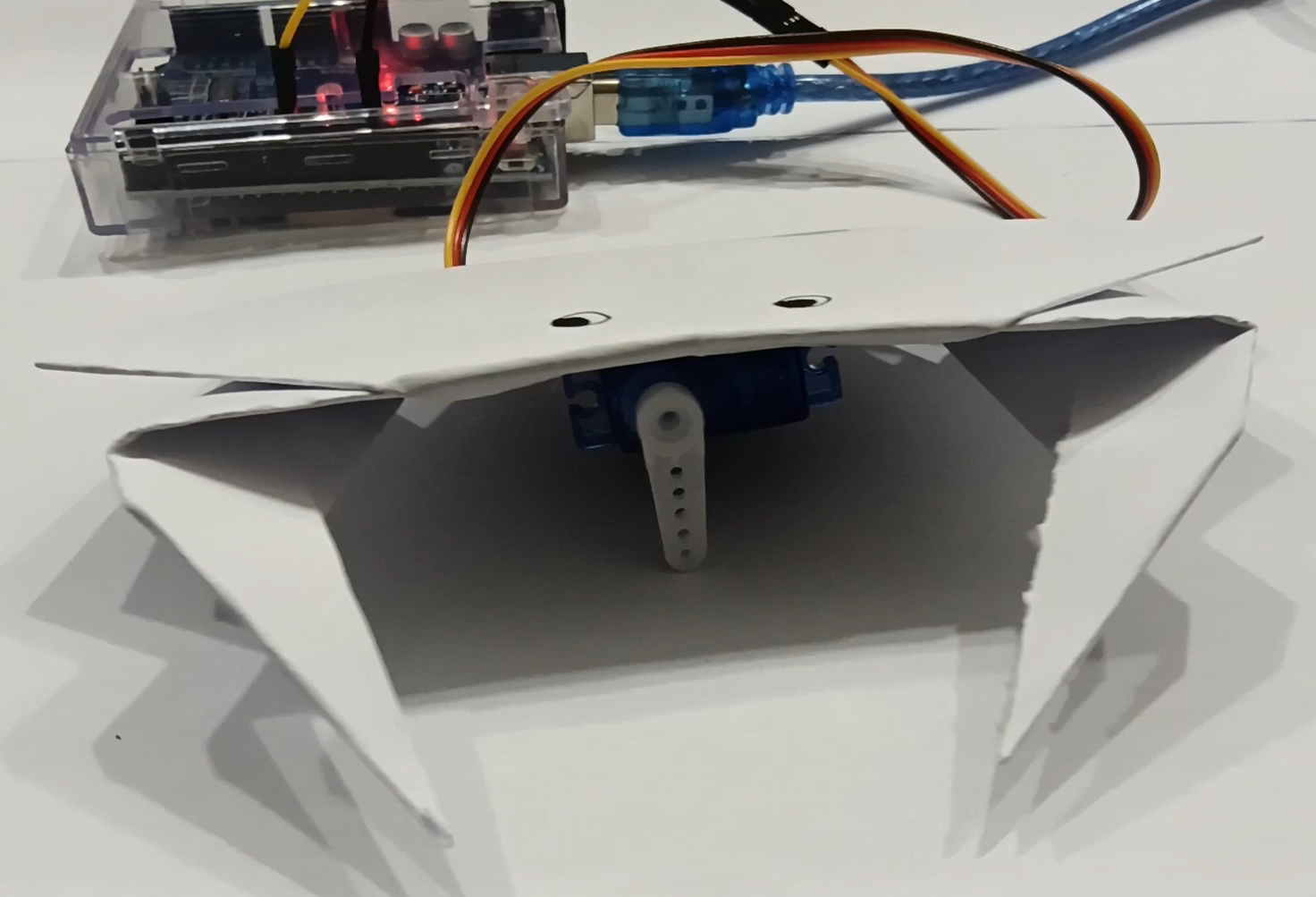
结论:能动,但是不能走
观察:不能走的原因是左移了多少,右移回来了。
思路1:改变偏心轴,让左移的多右移的少,就能实现缓慢前进。
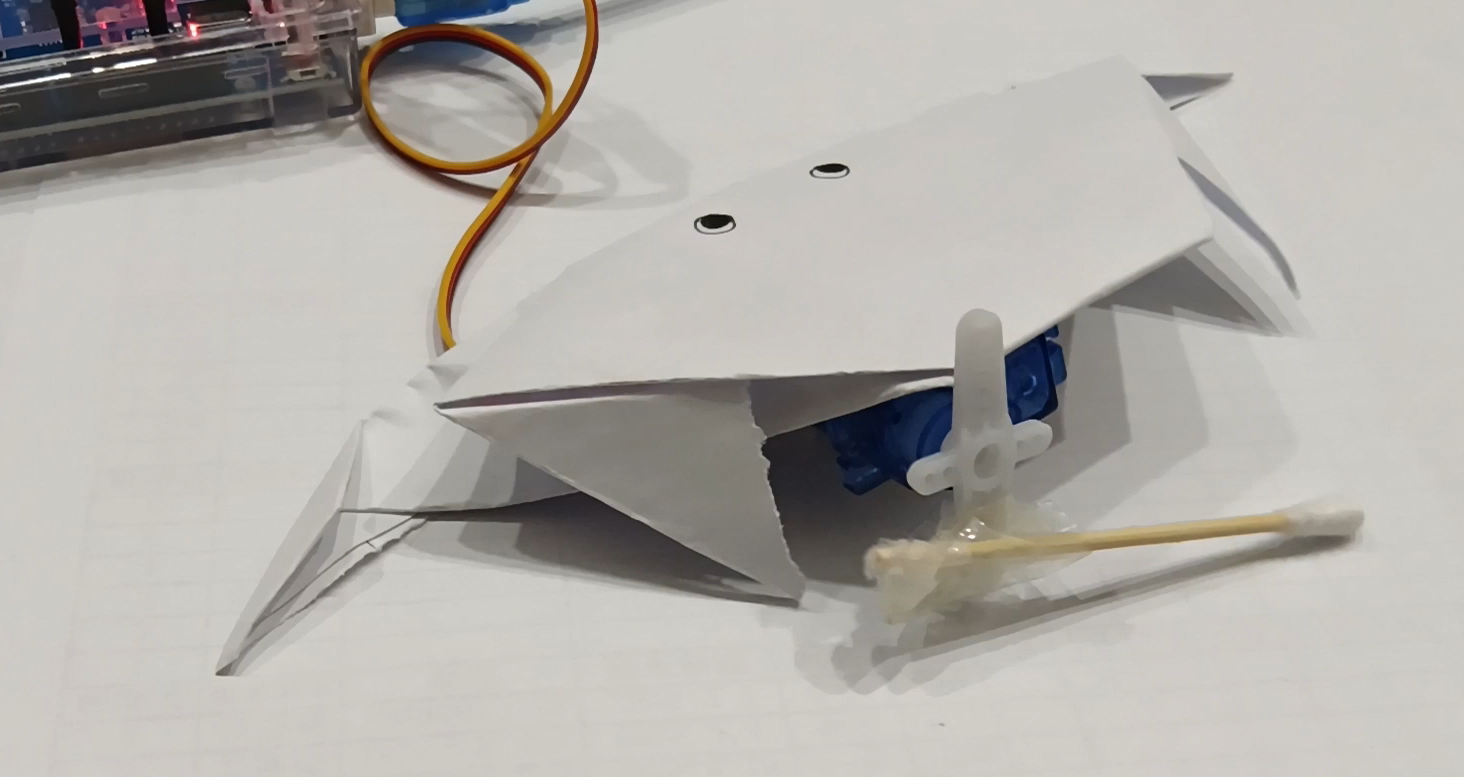
思路2:修改舵机旋转角度,只往左转90°。就不会折回来了~

好啦,横着走的小螃蟹就是这样了~
简易arduino折纸机器人