编写第一个ros程序
1.下载VScode
下载链接如下:
Download Visual Studio Code - Mac, Linux, Windows
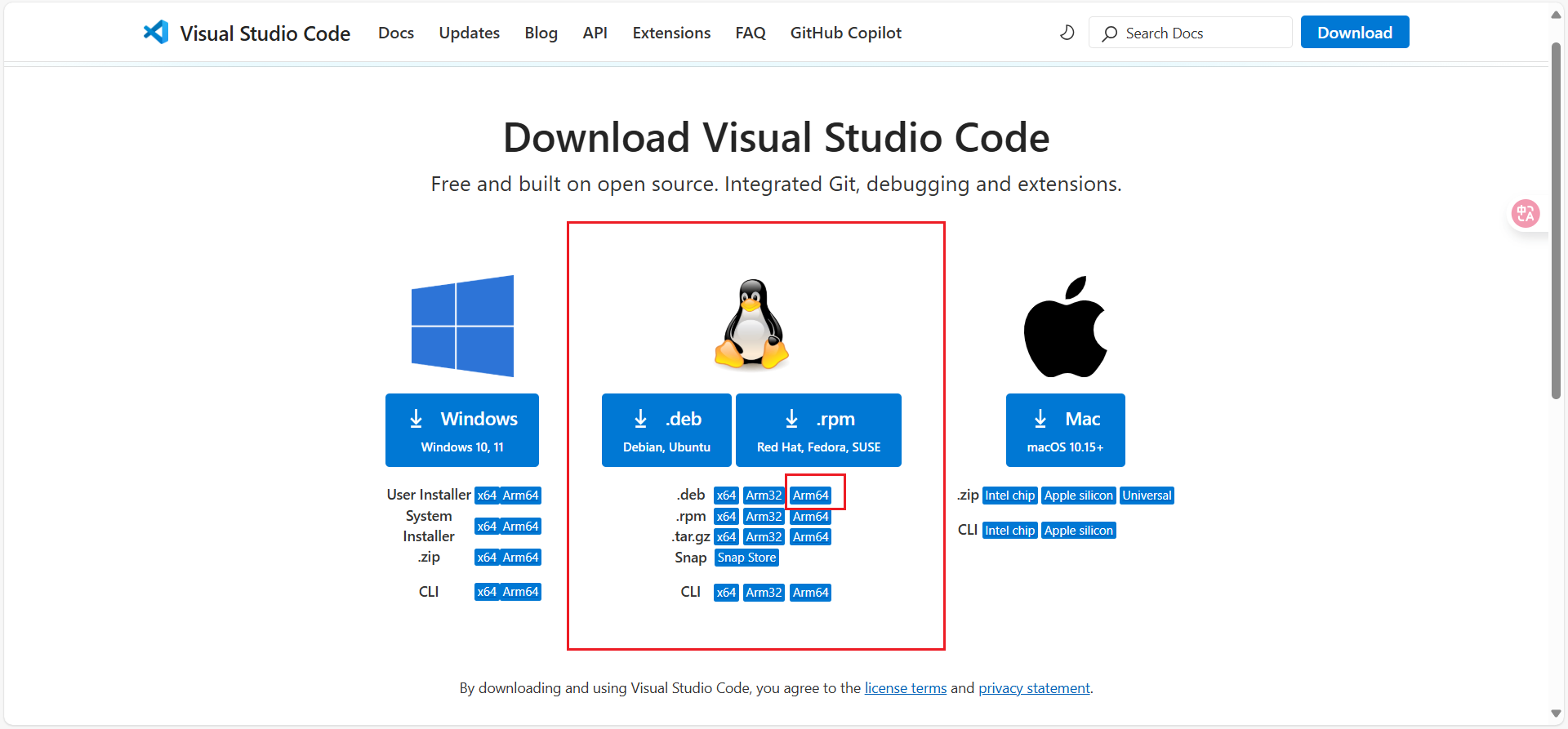
下载ARM64下的.deb文件
打开虚拟机,再rosnoetic下新建一个文件夹VSCODE,将windows下的文件导入该文件夹下如下图。

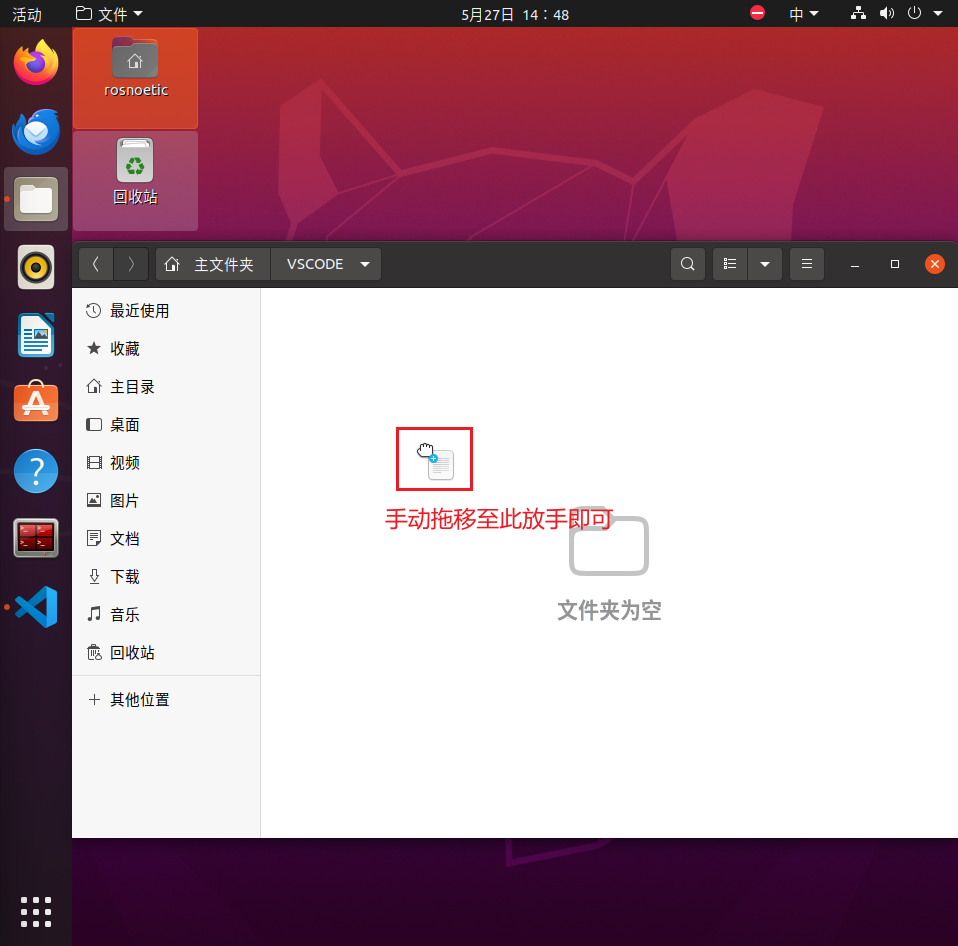
在该文件夹下右键选择在终端中打开

输入如下代码
sudo dpkg -i code_1.100.2-1747260578_amd64.deb
然后会跳出一个界面直接选择是然后回车即可
然后可以把VSCODE删除掉(这是.deb是安装包删了不影响)
2.打开VSCODE并放入收藏夹

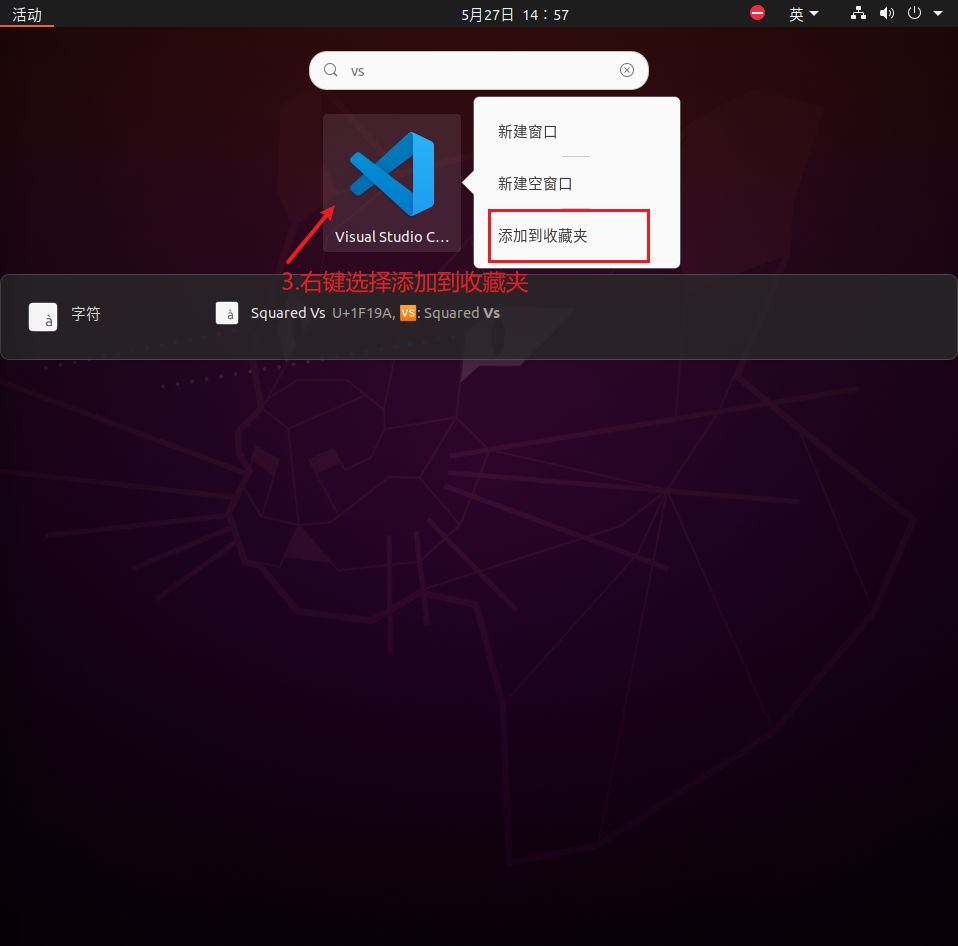
然后按两次ESC键可以回到桌面。
2.打开VSCODE并下载相关扩展
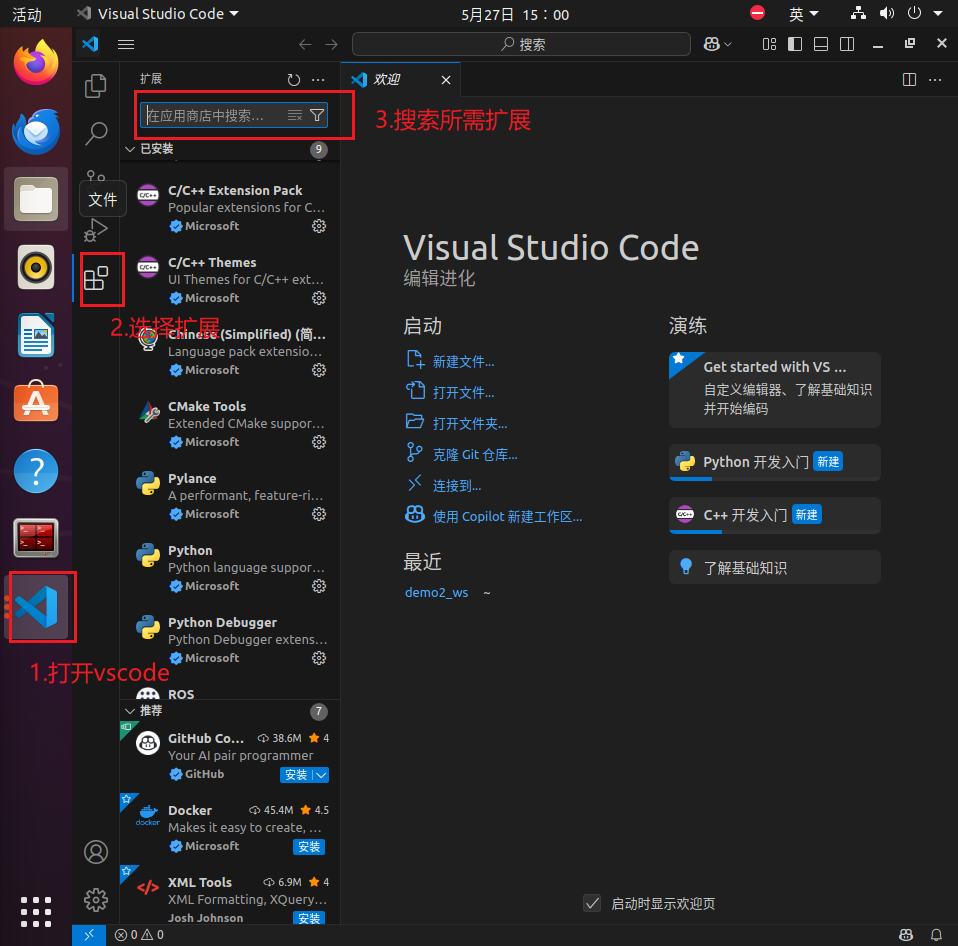
需要下载如下扩展
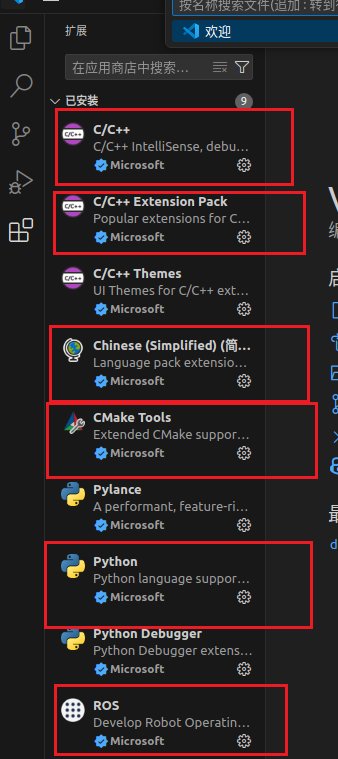
安装完这些插件后重启VSCODE
3.创建一个ROS工作空间
在主文件夹下打开一个终端输入
mkdir -p demo1_ros/src
然后再输入(可以用tab补齐)
cd demo2_ros/
然后在输入
catkin_make会发现执行后demo1_ros文件夹下会多出来build和devel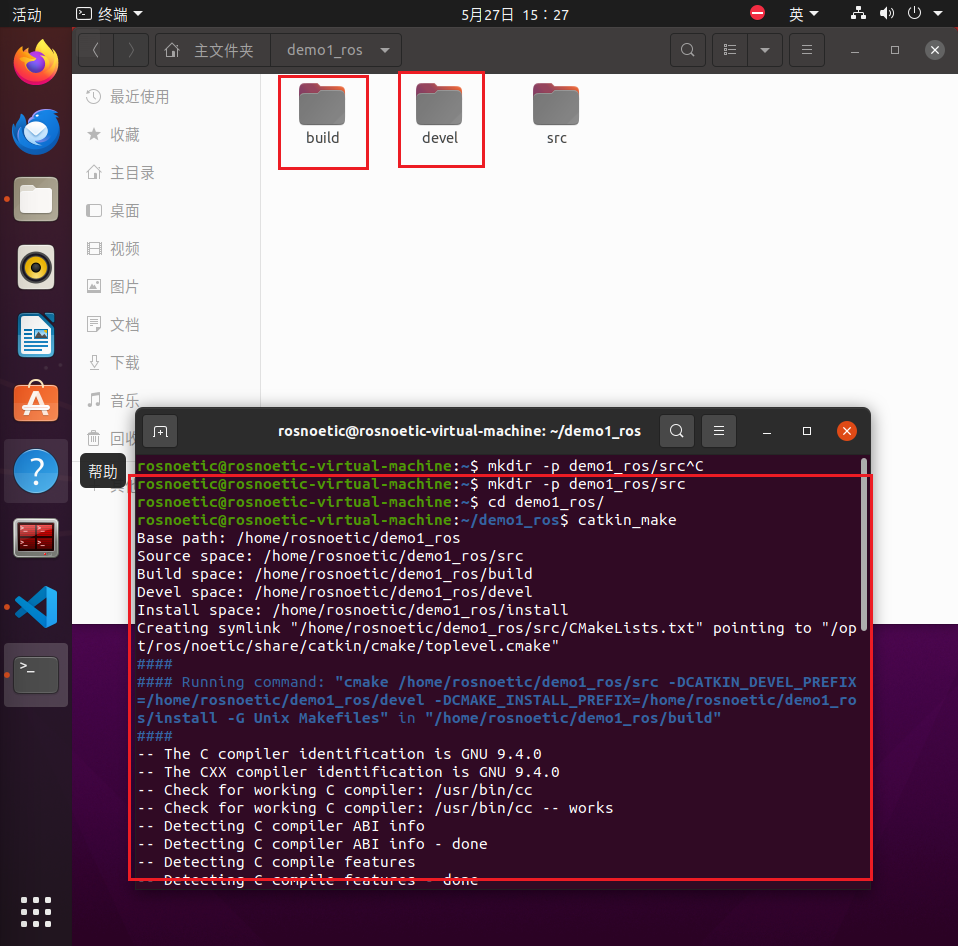
然后再输入(注意code(空格).)打开vscode
code .打开后按下 ctrl + shift + B
再上面的对话框中选择第二个并打开那个设置按钮
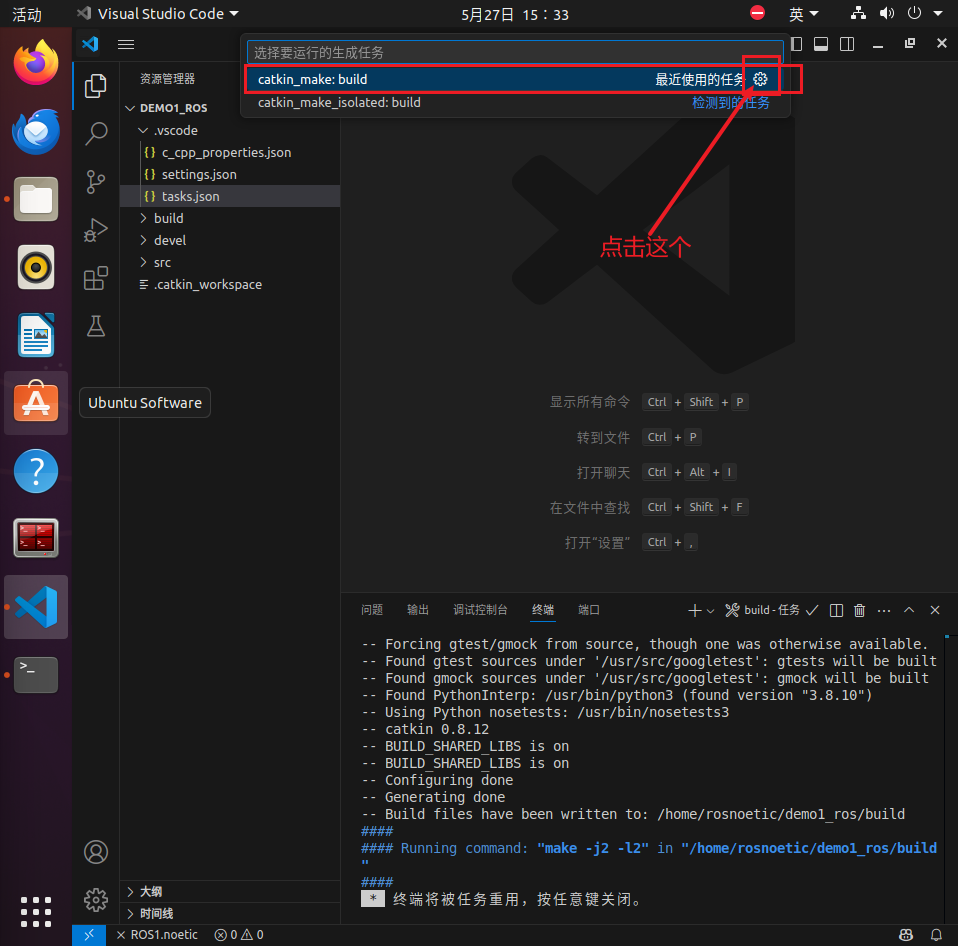
后会弹出一个这个界面
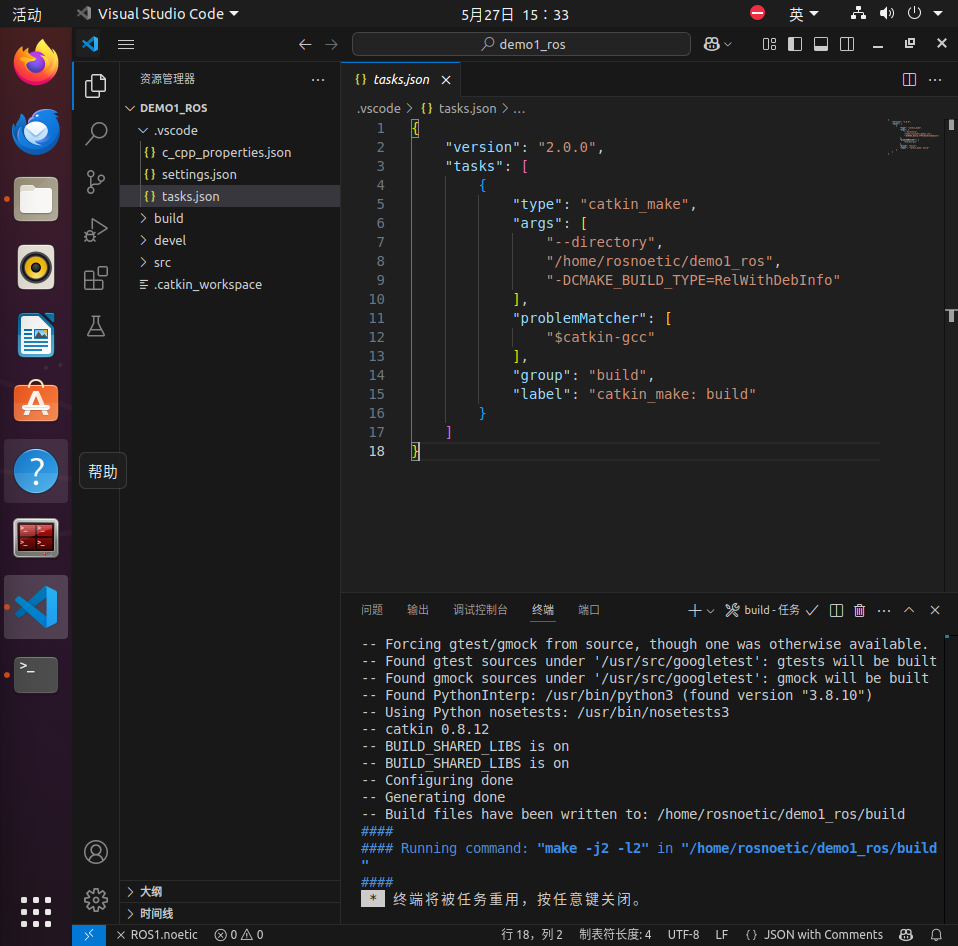
将下面这个代码替换进去即可然后按ctrl+s保存
{"version": "2.0.0","tasks": [{"type": "catkin_make","args": ["--directory","/home/rosnoetic/demo1_ros","-DCMAKE_BUILD_TYPE=RelWithDebInfo"],"group":{"kind": "build","isDefault": true},"problemMatcher": ["$catkin-gcc"],"label": "catkin_make: build"}]
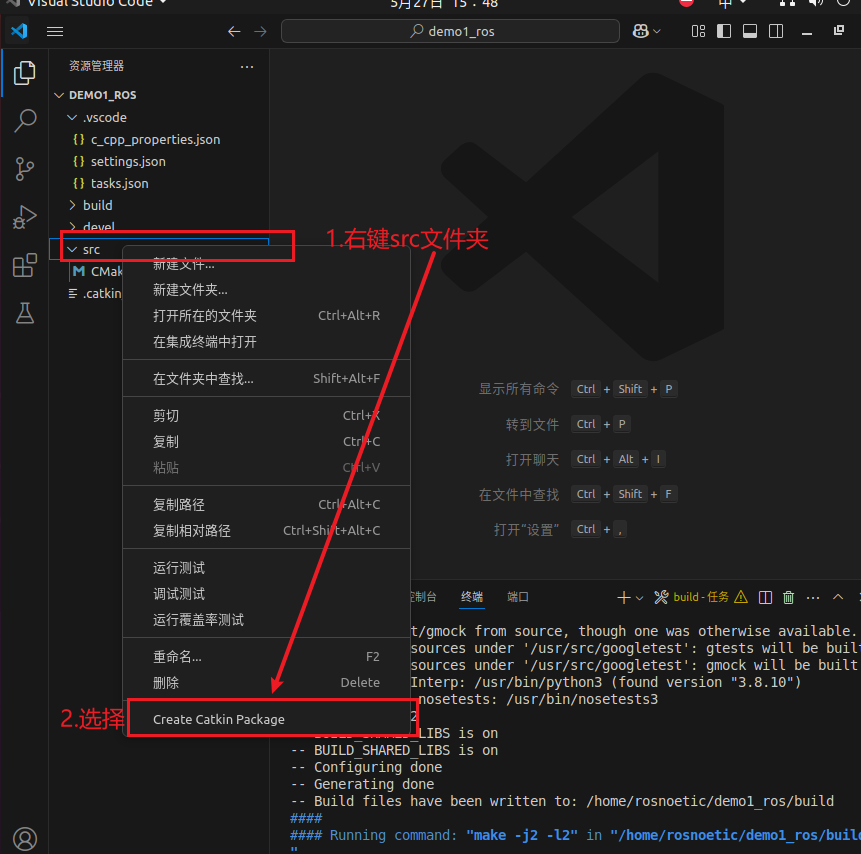
}然后右键src选择创建package
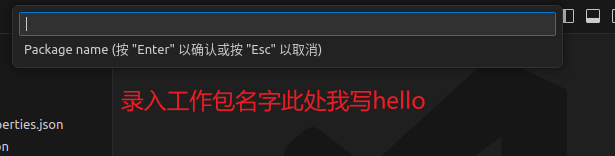
在弹窗中输入hello 按下回车键
再新的弹窗中输入依赖项如下代码和下图后回车
roscpp rospy std_msgs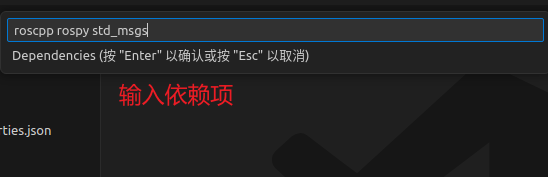
按ctrl + shift+ B如果编译没问题则配置正确
然后就会多出来一个hello文件夹(你上面的工作包叫啥名这里多出来啥文件夹)
4.创建一个CPP程序
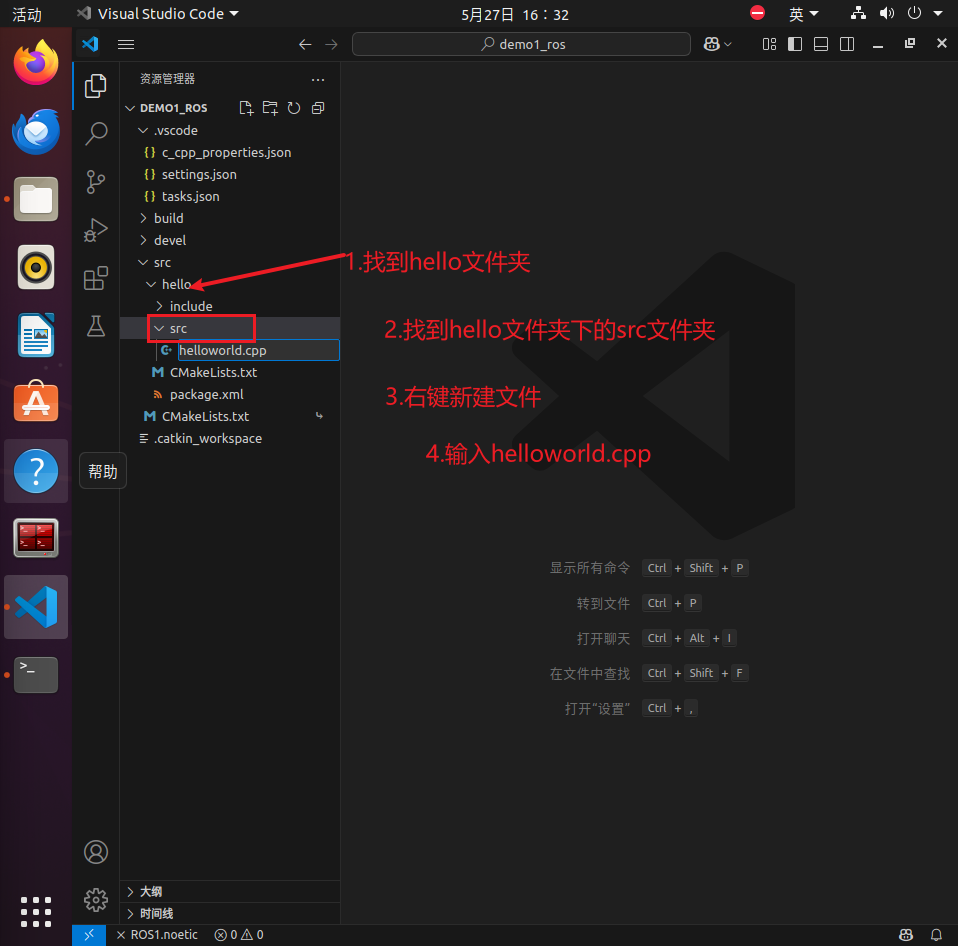
再hello文件夹下找到src文件夹右键新建文件helloworld.cpp
4.1 打开helloworld.cpp输入以下代码
//导入标准头文件
#include "ros/ros.h"int main(int argc, char *argv[])
{ros::init(argc,argv,"helloworld");//创建ros节点ROS_INFO("hellworld\n");//打印输出return 0;
}
4.2 打开hello文件夹下的CMakeLists.txt
通过ctrl+f找到add_executable打开这一行注释
并改为下面
add_executable(helloworld src/helloworld.cpp)前面是节点后面是在hello文件夹下的cpp文件位置
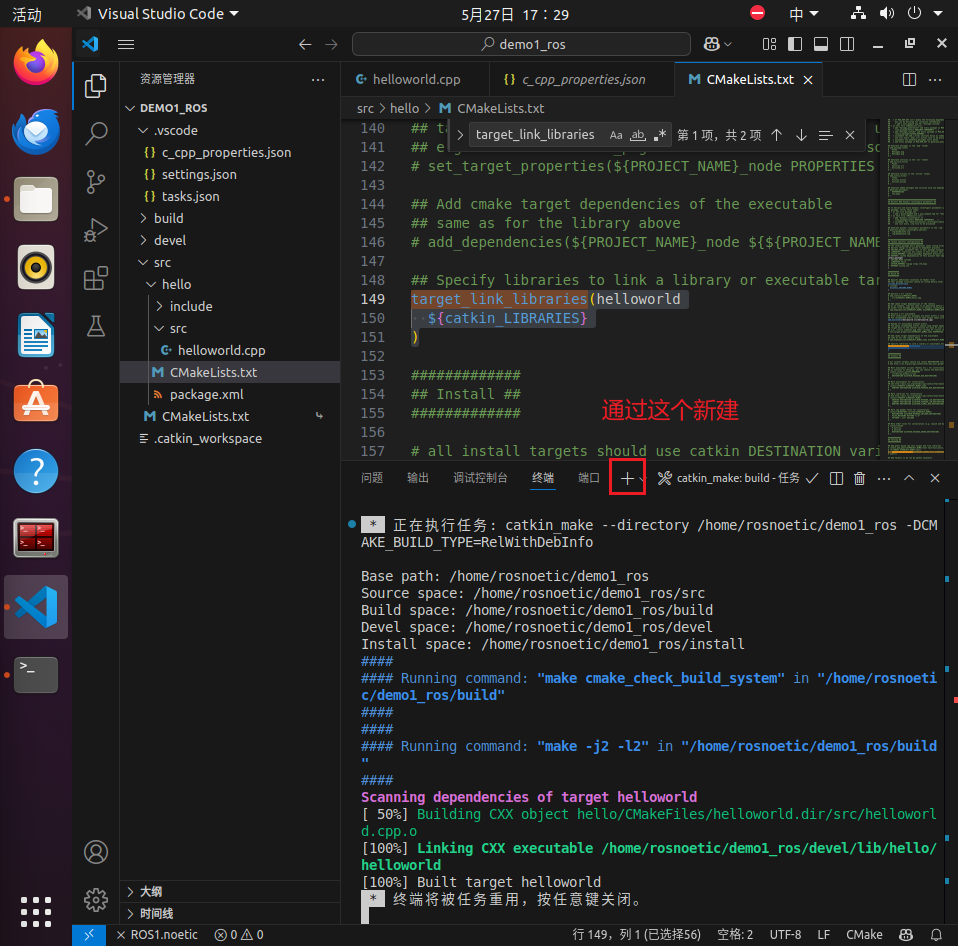
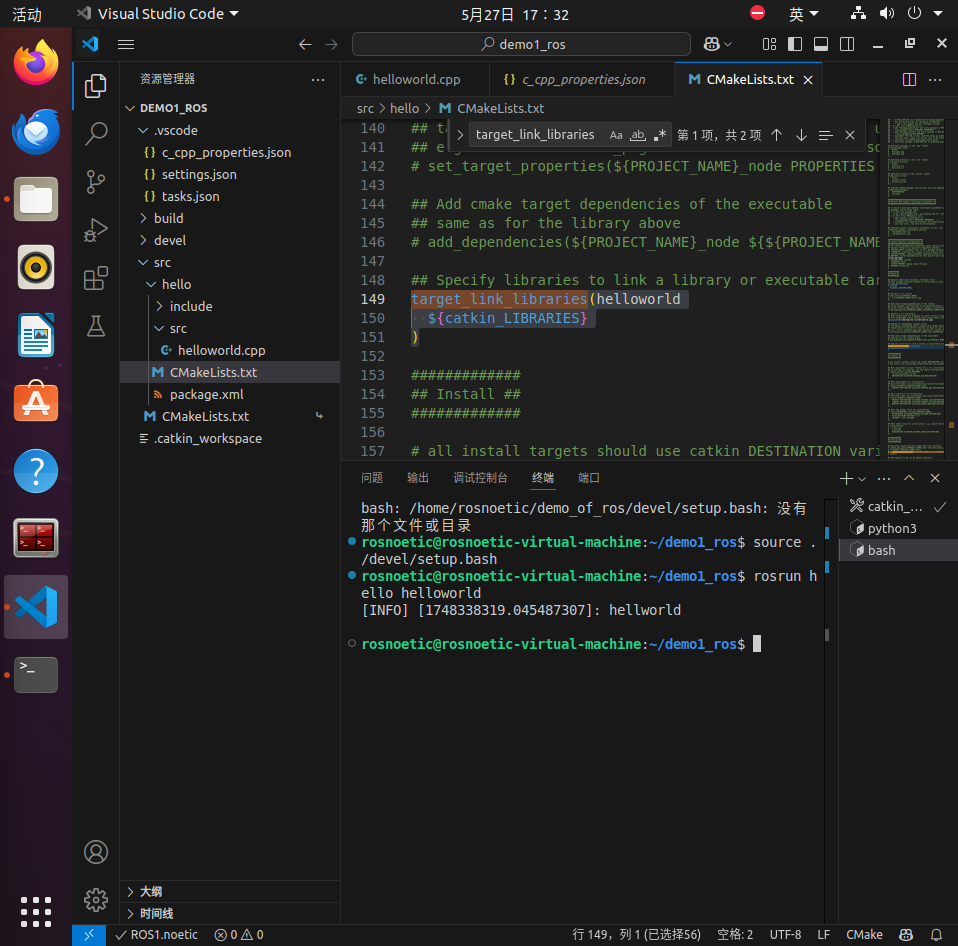
找到在add_executable下的第一个target_link_libraries将下面三行取消注释。
并将其改为下面代码(将上面的节点改为设的helloworld即可)
target_link_libraries(helloworld${catkin_LIBRARIES}
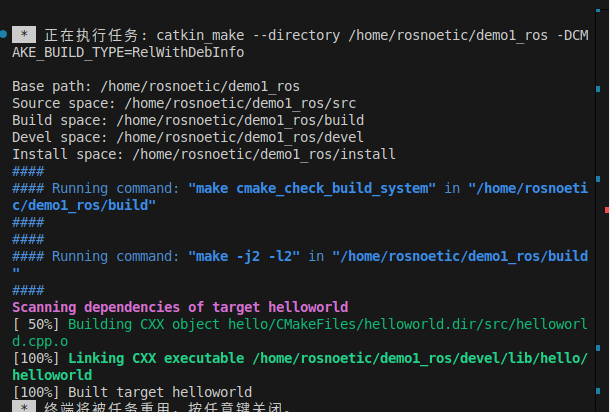
)然后ctrl + s 保存后,按ctrl+shift+B编译,成功后如下图
4.3 运行cpp文件
3.1新建一个终端输入roscore
输入roscore后回车
再建一个终端输入(更新环境)
source ./devel/setup.bash在输入(rosrun (你的工作包文件夹)(你的节点映射))
rosrun hello helloworld发现输出成功
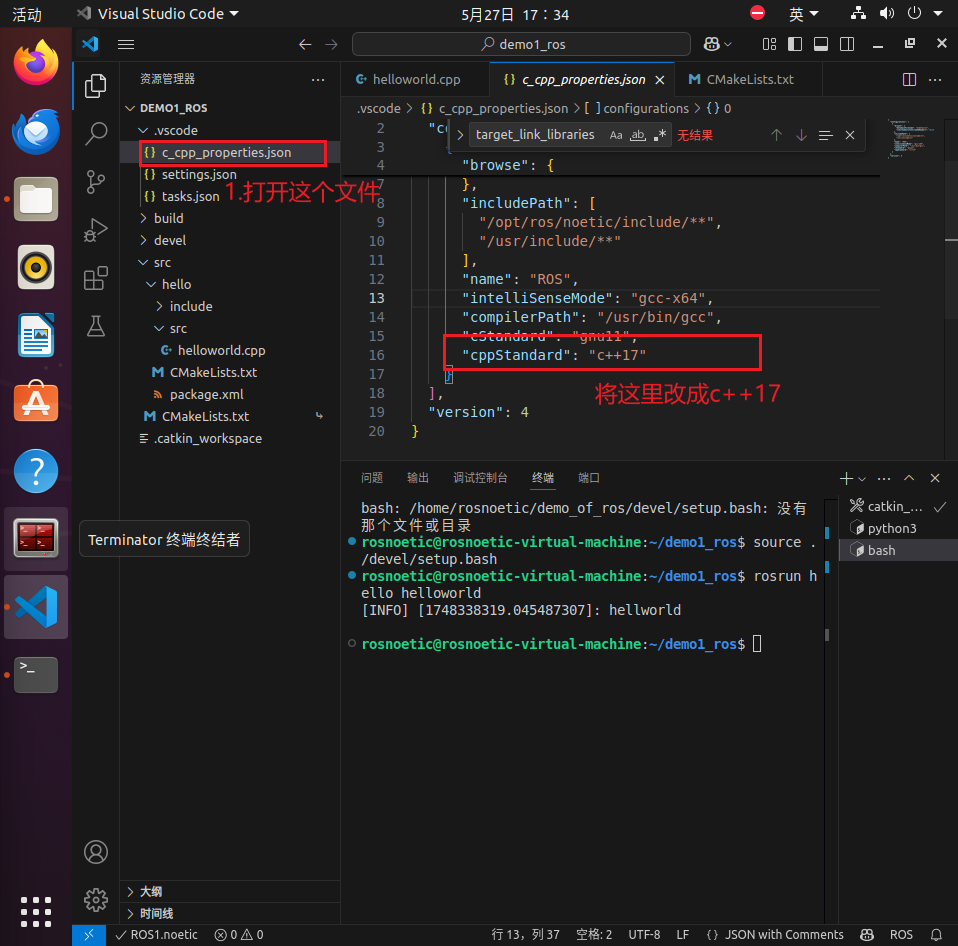
4.4 配置自动补齐
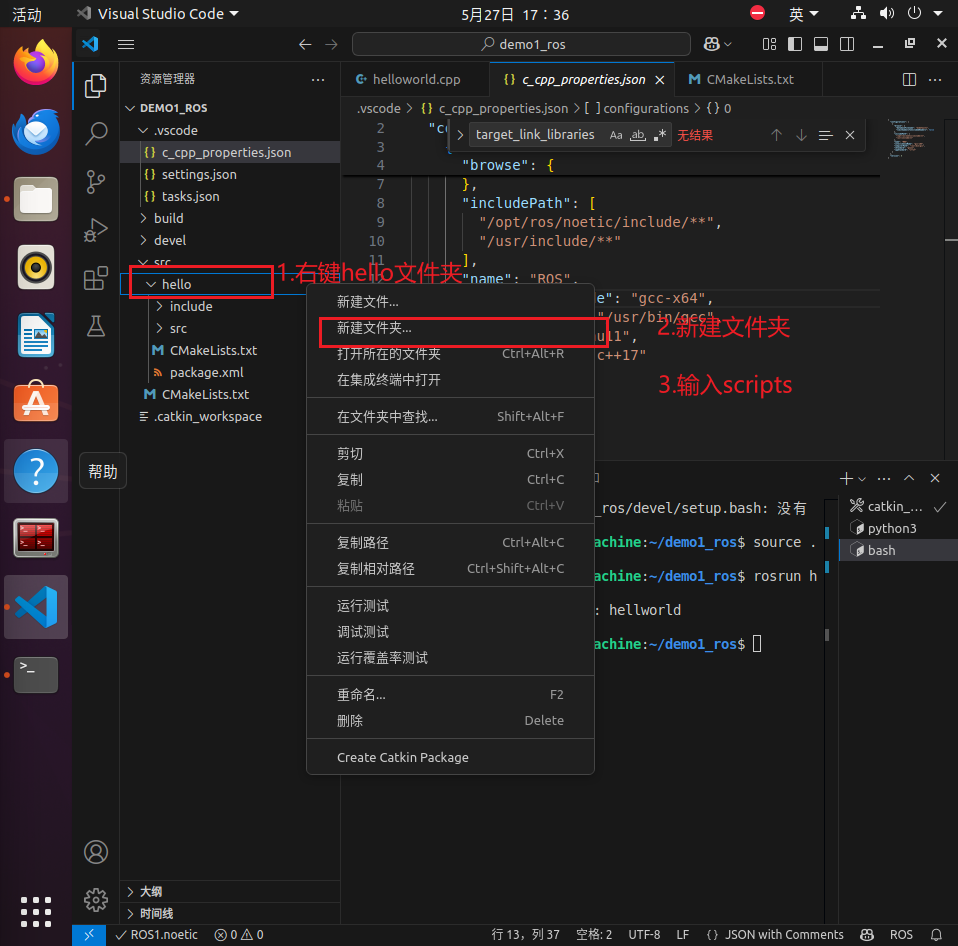
5.创建一个py文件
在hello文件夹下新建一个scripts文件夹
5.1新建一个py文件
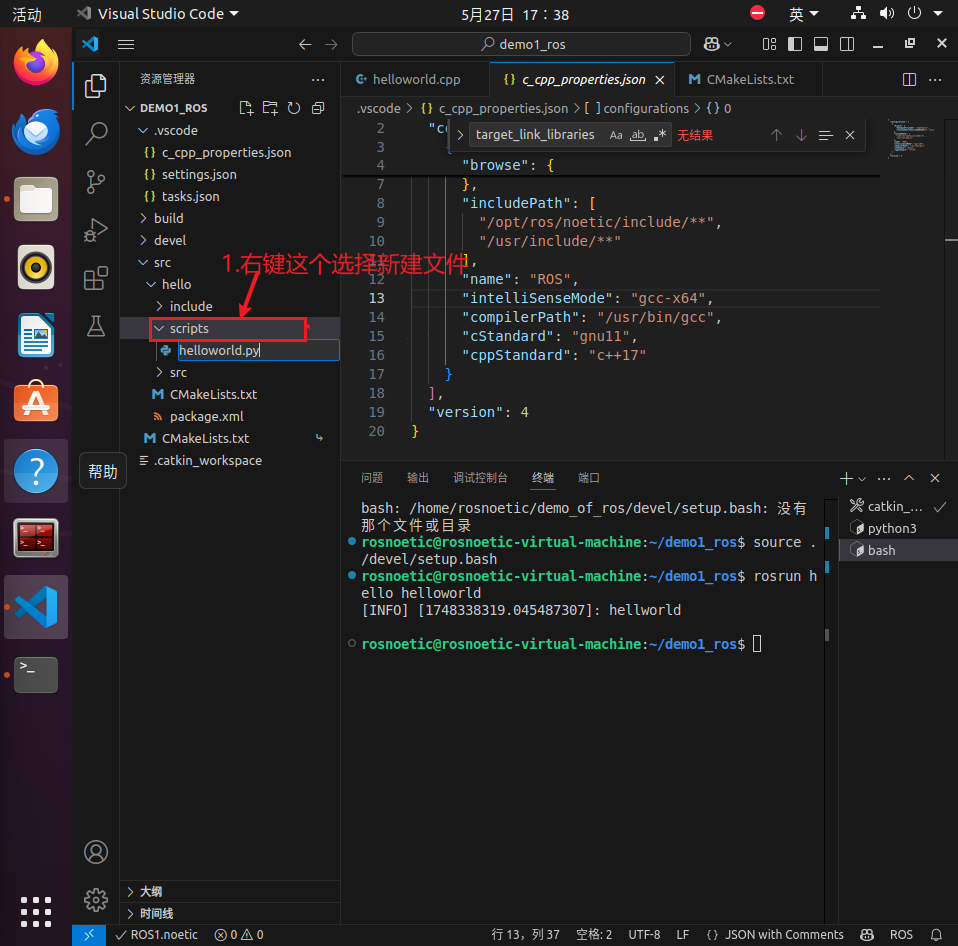
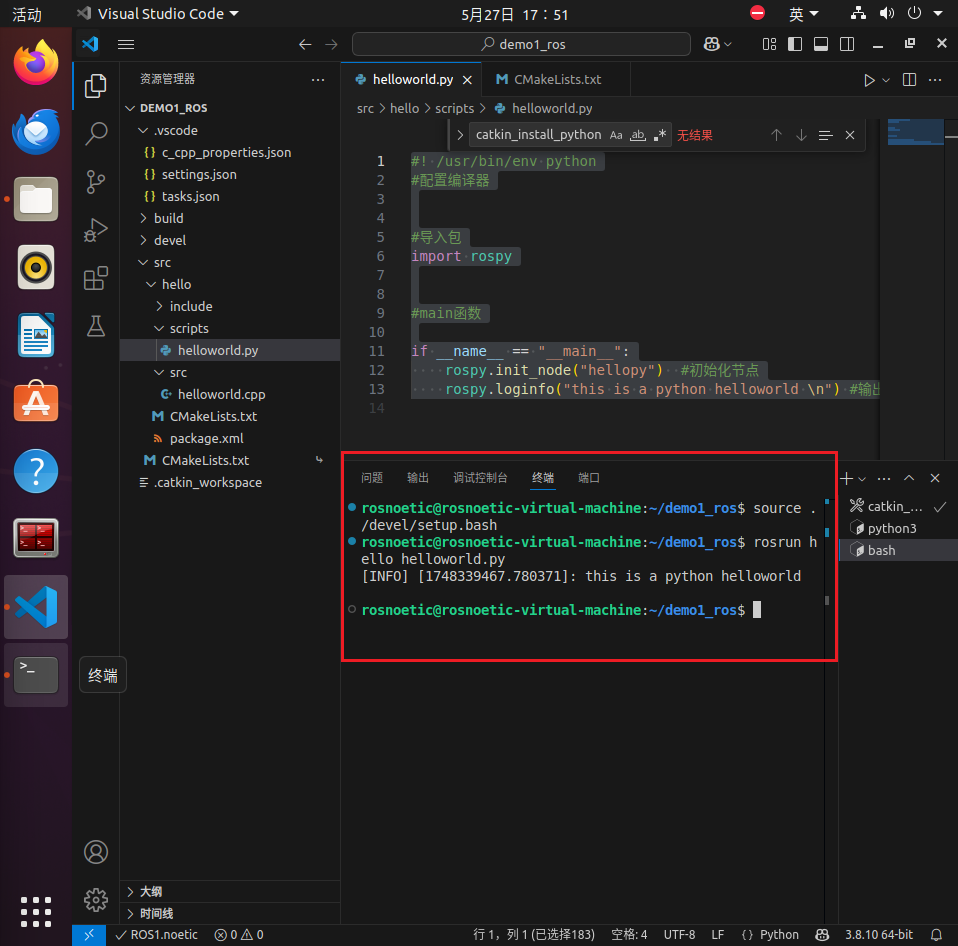
5.2在helloworld.py中输入如下代码
#! /usr/bin/env python
#配置编译器#导入包
import rospy#main函数if __name__ == "__main__":rospy.init_node("hellopy") #初始化节点rospy.loginfo("this is a python helloworld \n") #输出
5.3打开hello文件夹下的CMakeLists.txt
按ctrl + f搜索catkin_install_python取消注释这三行
并将其改为如下代码后ctrl +是保存后按ctrl + shift +B运行编译
catkin_install_python(PROGRAMSscripts/helloworld.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)5.4运行python文件
新建一个终端输入(更新环境)
source ./devel/setup.bash在输入(rosrun (你的工作包文件夹)(你的节点映射))
rosrun hello helloworld.py得到如下输出