【AI论文】交互式生成视频综述
摘要:交互式生成视频(IGV)已成为一项关键技术,以应对各个领域对高质量交互式视频内容日益增长的需求。 在本文中,我们将IGV定义为一种技术,它将生成能力与具有交互功能的多样化高质量视频内容相结合,通过控制信号和响应反馈实现用户参与。 我们调查了IGV应用的当前格局,重点关注三个主要领域:1)游戏,IGV可以在虚拟世界中进行无限探索; 2)具身人工智能,其中IGV作为一个物理感知环境合成器,用于训练代理与动态演化的场景进行多模态交互; 以及3)自动驾驶,其中IGV为安全关键测试和验证提供了闭环仿真能力。 为了指导未来的发展,我们提出了一个全面的框架,将理想的IGV系统分解为五个基本模块:生成、控制、记忆、动态和智能。 此外,我们系统地分析了实现理想IGV系统的每个组件的技术挑战和未来方向,例如实现实时生成、实现开放域控制、保持长期一致性、模拟精确的物理和整合因果推理。 我们相信,这种系统性的分析将有助于IGV领域的未来研究和开发,最终推动该技术朝着更复杂和实用的方向发展。Huggingface链接:Paper page,论文链接:2504.21853
研究背景和目的
研究背景
随着深度学习技术的飞速发展,视频生成技术取得了显著进步,特别是在生成对抗网络(GANs)、变分自编码器(VAEs)、扩散模型(Diffusion Models)和自回归模型(Autoregressive Models)等生成式建模范式的推动下,现代视频生成系统能够生成高质量、逼真的视频序列。这些技术不仅在内容创作、模拟仿真和决策制定等领域展现出巨大潜力,还催生了交互式生成视频(Interactive Generative Video, IGV)这一新兴研究方向。IGV结合了生成能力和交互功能,允许用户通过控制信号和响应反馈参与视频内容的生成过程,为游戏、具身人工智能(Embodied AI)和自动驾驶等领域带来了革命性的变化。
在游戏领域,IGV技术使得游戏开发者能够创建无限可探索的交互式虚拟世界,游戏内容可以根据玩家的偏好和技能水平动态生成和个性化调整,极大地提升了游戏的可玩性和沉浸感。在具身人工智能领域,IGV作为物理感知环境合成器,为训练代理与动态演化的场景进行多模态交互提供了有力支持,推动了智能体在复杂环境中的自主学习和决策能力。在自动驾驶领域,IGV通过提供闭环仿真能力,支持安全关键的测试和验证,为自动驾驶系统的研发和部署提供了重要保障。
研究目的
本文旨在全面综述交互式生成视频(IGV)技术的最新进展,深入分析其在游戏、具身人工智能和自动驾驶三大主要应用领域的发展现状和挑战。通过提出一个综合性的IGV系统框架,将理想的IGV系统分解为生成、控制、记忆、动态和智能五个基本模块,系统探讨每个模块的技术挑战和未来发展方向。本文的研究目的包括:
- 梳理IGV技术的发展脉络:回顾IGV技术在不同应用领域的发展历程,总结其关键技术突破和应用成果。
- 构建IGV系统框架:提出一个综合性的IGV系统框架,明确各模块的功能和相互关系,为IGV技术的进一步研究提供理论指导。
- 分析技术挑战:系统分析IGV系统各模块在实现过程中面临的技术挑战,如实时生成、开放域控制、长期一致性保持、精确物理模拟和因果推理整合等。
- 提出未来研究方向:基于技术挑战分析,提出IGV技术的未来研究方向,为相关领域的研究人员提供参考和启示。
研究方法
文献综述法
本文采用文献综述法,系统收集和分析IGV技术在游戏、具身人工智能和自动驾驶领域的相关研究文献。通过查阅国内外知名学术期刊、会议论文和预印本平台,获取IGV技术的最新研究成果和应用案例。在文献筛选过程中,重点关注IGV技术的定义、系统框架、关键模块、技术挑战和未来发展方向等方面的内容。
案例分析法
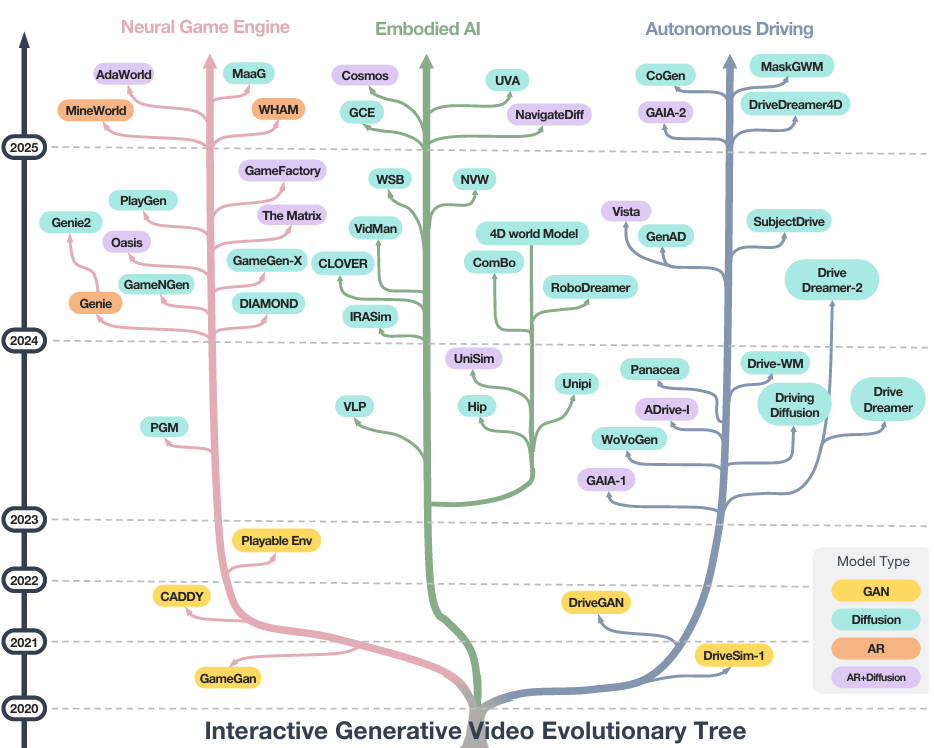
为了更直观地展示IGV技术的应用效果,本文选取了多个典型案例进行深入分析。在游戏领域,分析了《GameGAN》、《GameGen-X》和《Genie2》等模型在游戏内容生成和交互控制方面的创新点;在具身人工智能领域,探讨了《VLP》、《UniSim》和《RoboDreamer》等模型在任务规划、策略学习和泛化能力方面的研究成果;在自动驾驶领域,研究了《DriveGAN》、《GAIA-1》和《Vista》等模型在驾驶场景生成和实时决策方面的应用效果。
技术挑战分析法
针对IGV系统各模块在实现过程中面临的技术挑战,本文进行了系统分析。通过梳理现有文献中的研究难点和解决方案,总结了实时生成、开放域控制、长期一致性保持、精确物理模拟和因果推理整合等方面的技术瓶颈。同时,结合具体案例,分析了不同技术路线在应对这些挑战时的优缺点。
研究结果
IGV技术在不同领域的应用成果
-
游戏领域:IGV技术使得游戏开发者能够创建无限可探索的交互式虚拟世界,游戏内容可以根据玩家的偏好和技能水平动态生成和个性化调整。例如,《GameGAN》通过生成对抗网络模拟了《吃豆人》游戏的环境和动态,展示了IGV在游戏内容生成方面的潜力;《GameGen-X》则进一步扩展了IGV的应用范围,支持文本到角色、草图到环境等多模态内容生成;《Genie2》则通过自回归潜在扩散模型实现了实时帧级生成,显著提升了游戏的交互性和可玩性。
-
具身人工智能领域:IGV技术为训练代理与动态演化的场景进行多模态交互提供了有力支持。例如,《VLP》通过生成式模型为机器人提供了视觉规划能力,使得机器人能够根据视觉输入生成动作序列;《UniSim》则通过统一的生成模型支持了机器人操作和导航任务的训练;《RoboDreamer》则通过分解视频生成过程,提高了机器人任务分解和组合的能力。
-
自动驾驶领域:IGV技术通过提供闭环仿真能力,支持了自动驾驶系统的安全关键测试和验证。例如,《DriveGAN》通过生成对抗网络模拟了动态驾驶环境,为自动驾驶系统提供了丰富的训练数据;《GAIA-1》则通过扩散模型生成了高质量、可控的驾驶视频序列,支持了自动驾驶策略的学习和优化;《Vista》则通过多视图生成世界模型,提高了自动驾驶系统在不同道路条件和光照环境下的泛化能力。
IGV系统框架的构建
本文提出了一个综合性的IGV系统框架,将理想的IGV系统分解为生成、控制、记忆、动态和智能五个基本模块。各模块的功能和相互关系如下:
- 生成模块:负责视频内容的合成,要求具备高保真度、时间一致性和实时处理能力。
- 控制模块:管理用户与虚拟环境的交互,包括导航控制和交互控制两个方面。
- 记忆模块:维护生成内容的一致性,包括静态记忆和动态记忆两个方面。
- 动态模块:模拟虚拟世界中的物理定律,确保生成内容的物理合理性。
- 智能模块:赋予IGV系统高级认知能力,包括推理和自进化两个方面。
技术挑战分析
-
实时生成:尽管扩散模型在视频生成方面取得了显著进展,但其计算复杂度较高,难以满足实时生成的需求。未来研究需要探索更高效的生成架构和优化策略,如轻量级扩散模型和自回归-非自回归混合模型等。
-
开放域控制:实现开放域控制是IGV技术面临的重要挑战之一。现有控制机制主要适用于受限环境,难以扩展到更广泛的领域。未来研究需要探索更通用的控制接口和更灵活的控制策略,如基于语言模型的控制信号生成和跨模态控制等。
-
长期一致性保持:在长时间序列生成过程中保持场景组成、对象身份和视觉属性的一致性是IGV技术面临的另一大挑战。现有方法主要依赖于注意力机制,但在处理复杂场景和长时间序列时仍存在局限性。未来研究需要探索更有效的记忆架构和一致性维护策略,如基于身份感知嵌入和动态场景图的方法等。
-
精确物理模拟:模拟虚拟世界中的物理定律是IGV技术的重要组成部分。然而,现有方法在处理复杂物理现象和精确物理参数调整方面仍存在不足。未来研究需要探索更精确的物理模拟方法和更灵活的物理参数调整策略,如基于数据驱动的概率分布学习和物理参数直接调整等。
-
因果推理整合:将因果推理能力整合到IGV系统中是提升系统智能水平的关键。然而,现有方法在处理复杂因果关系和实现高效推理方面仍存在挑战。未来研究需要探索更有效的因果推理架构和整合策略,如基于大型语言模型的因果推理和跨模态因果关系建模等。
研究局限
尽管本文在IGV技术的研究方面取得了显著进展,但仍存在一些局限性:
-
文献覆盖范围有限:尽管本文系统收集了IGV技术在游戏、具身人工智能和自动驾驶领域的相关研究文献,但仍可能遗漏了一些重要研究成果。未来研究需要进一步扩大文献覆盖范围,确保对IGV技术的全面理解。
-
技术挑战分析不够深入:尽管本文对IGV系统各模块在实现过程中面临的技术挑战进行了系统分析,但仍可能存在一些未被充分探讨的问题。未来研究需要进一步深入挖掘技术挑战的本质和根源,提出更有效的解决方案。
-
未来研究方向不够具体:尽管本文提出了IGV技术的未来研究方向,但部分方向仍较为宽泛和抽象。未来研究需要进一步细化未来研究方向,提出具体的研究问题和假设,为相关领域的研究人员提供更明确的指导。
未来研究方向
基于对IGV技术的研究背景、目的、方法、结果和局限性的分析,本文提出以下未来研究方向:
-
高效生成架构探索:针对实时生成的需求,未来研究需要探索更高效的生成架构和优化策略。例如,可以研究轻量级扩散模型、自回归-非自回归混合模型以及基于知识蒸馏的模型压缩方法等,以提高视频生成的效率和质量。
-
通用控制接口设计:为了实现开放域控制,未来研究需要设计更通用的控制接口和更灵活的控制策略。例如,可以研究基于语言模型的控制信号生成方法、跨模态控制策略以及基于强化学习的控制优化方法等,以提高IGV系统在不同应用场景下的适应性和灵活性。
-
长期一致性维护策略:为了保持长时间序列生成过程中的一致性,未来研究需要探索更有效的记忆架构和一致性维护策略。例如,可以研究基于身份感知嵌入的方法、动态场景图以及基于深度学习的长期记忆机制等,以提高IGV系统在复杂场景和长时间序列生成过程中的稳定性和可靠性。
-
精确物理模拟方法:为了更精确地模拟虚拟世界中的物理定律,未来研究需要探索更精确的物理模拟方法和更灵活的物理参数调整策略。例如,可以研究基于数据驱动的概率分布学习方法、物理参数直接调整策略以及基于物理引擎的混合模拟方法等,以提高IGV系统在物理模拟方面的准确性和灵活性。
-
因果推理整合策略:为了将因果推理能力整合到IGV系统中,未来研究需要探索更有效的因果推理架构和整合策略。例如,可以研究基于大型语言模型的因果推理方法、跨模态因果关系建模以及基于因果图的推理优化方法等,以提高IGV系统的智能水平和决策能力。
-
多模态融合与交互:随着多模态技术的发展,未来IGV系统需要更好地支持多模态内容的生成与交互。研究如何将文本、音频、触觉等多种模态信息融入视频生成过程中,实现更加自然和丰富的用户交互体验,是未来IGV技术发展的重要方向。
-
可解释性与安全性:在自动驾驶等安全关键领域,IGV系统的可解释性和安全性至关重要。未来研究需要关注如何提高IGV系统的可解释性,使其决策过程更加透明和可信;同时,也需要加强系统的安全性研究,确保在复杂环境下IGV系统能够稳定、可靠地运行。
-
跨领域应用探索:除了游戏、具身人工智能和自动驾驶领域外,IGV技术在教育、医疗、娱乐等多个领域也具有广泛的应用前景。未来研究可以探索IGV技术在这些领域的应用潜力,推动IGV技术的多元化发展。
综上所述,交互式生成视频(IGV)技术作为一项新兴的研究方向,在游戏、具身人工智能和自动驾驶等领域展现出了巨大的应用潜力。通过系统梳理IGV技术的发展脉络、构建IGV系统框架、分析技术挑战和提出未来研究方向,本文为IGV技术的进一步研究和开发提供了有价值的参考和启示。未来,随着技术的不断进步和应用场景的不断拓展,IGV技术有望在更多领域发挥重要作用,推动相关领域的创新和发展。