【大模型】图像生成:ESRGAN:增强型超分辨率生成对抗网络的革命性突破

深度解析ESRGAN:增强型超分辨率生成对抗网络的革命性突破
- 技术演进与架构创新
- 核心改进亮点
- 环境配置与快速入门
- 硬件要求
- 安装步骤
- 实战全流程解析
- 1. 单图像超分辨率重建
- 2. 自定义数据集训练
- 3. 视频超分处理
- 核心技术深度解析
- 1. 残差密集块(RRDB)
- 2. 相对判别器(RaGAN)
- 3. 感知损失优化
- 常见问题与解决方案
- 1. 显存不足错误
- 2. 生成图像模糊
- 3. 训练过程震荡
- 性能优化策略
- 1. 混合精度训练
- 2. TensorRT加速
- 3. 多GPU并行
- 学术背景与核心论文
- 基础论文
- 技术突破
- 应用场景与未来展望
- 典型应用领域
- 技术演进方向
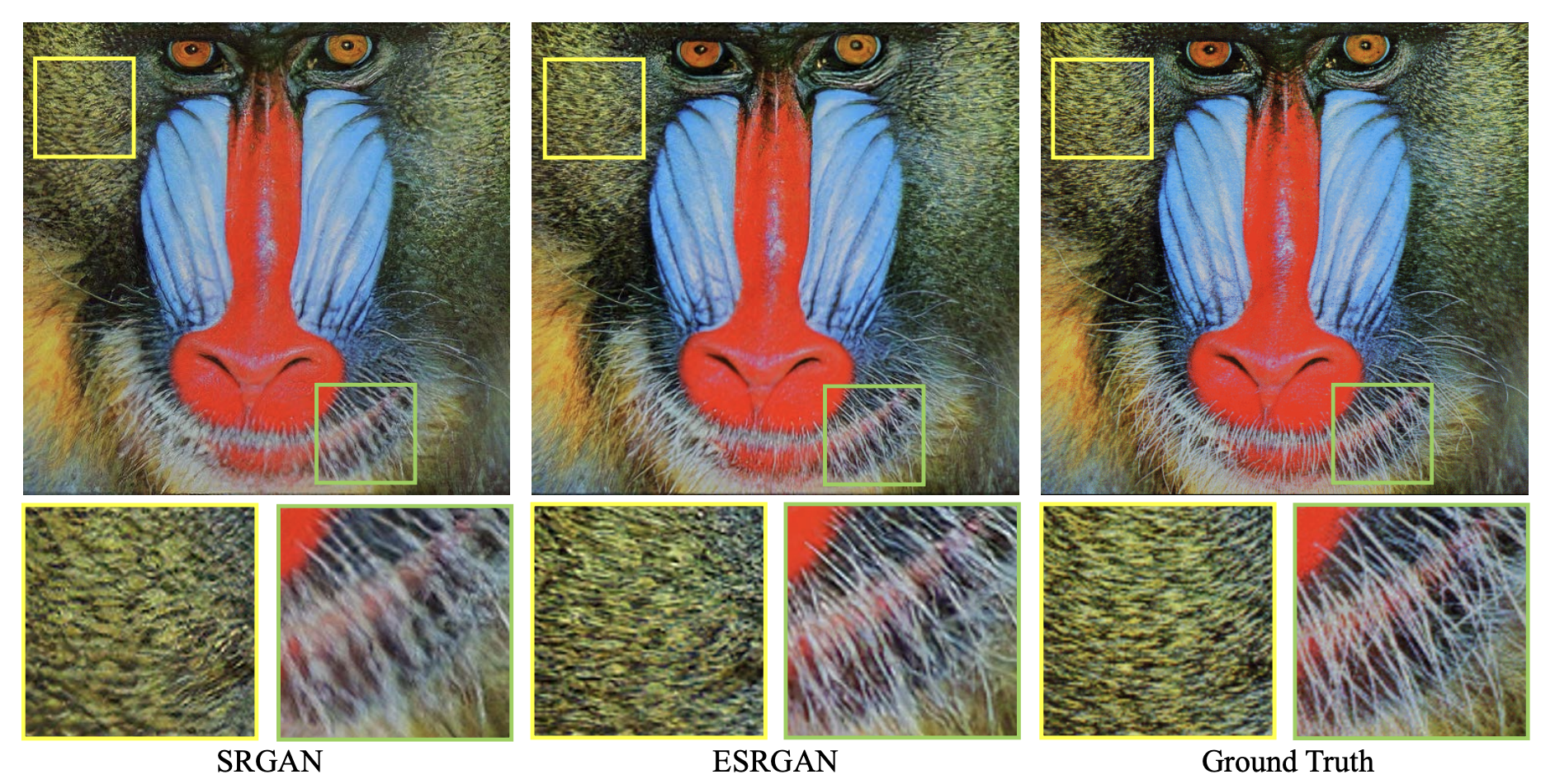
ESRGAN(Enhanced Super-Resolution Generative Adversarial Networks)是图像超分辨率领域的里程碑式工作,在ECCV 2018获得最佳论文奖。该项目通过多项创新性改进,将生成对抗网络(GAN)在图像重建领域的性能推向新高度。本文将从技术原理到工程实践,深入解析这一经典框架的设计哲学与使用方法。
技术演进与架构创新
核心改进亮点
| 对比项 | SRGAN | ESRGAN |
|---|---|---|
| 生成器结构 | 残差块 | 残差密集块(RRDB) |
| 判别器设计 | VGG特征匹配 | 相对判别器(Relativistic) |
| 归一化方式 | 批归一化 | 去除BN层 |
| 损失函数 | 感知损失+VGG | 感知损失+频谱归一化 |
| 网络深度 | 16层残差 | 23层RRDB |
环境配置与快速入门
硬件要求
| 组件 | 推荐配置 | 最低要求 |
|---|---|---|
| GPU | NVIDIA RTX 3090 | GTX 1080Ti |
| 显存 | 12GB | 8GB |
| CPU | Xeon 8核 | Core i5 |
| 内存 | 32GB | 16GB |
安装步骤
# 创建conda环境
conda create -n esrgan python=3.7 -y
conda activate esrgan# 安装PyTorch(适配CUDA 11.3)
conda install pytorch==1.12.1 torchvision==0.13.1 torchaudio==0.12.1 cudatoolkit=11.3 -c pytorch# 克隆仓库
git clone https://github.com/xinntao/ESRGAN.git
cd ESRGAN# 安装依赖
pip install -r requirements.txt# 下载预训练模型
wget https://github.com/xinntao/ESRGAN/releases/download/v0.1.1/RRDB_ESRGAN_x4.pth -P experiments/pretrained_models/
实战全流程解析
1. 单图像超分辨率重建
from basicsr.archs.rrdbnet_arch import RRDBNet
from basicsr.utils import img2tensor, tensor2img# 初始化模型
model = RRDBNet(num_in_ch=3, num_out_ch=3, num_feat=64, num_block=23)
model.load_state_dict(torch.load('experiments/pretrained_models/RRDB_ESRGAN_x4.pth'))
model.eval().cuda()# 处理输入图像
img_lq = cv2.imread('input.jpg', cv2.IMREAD_COLOR)
img_tensor = img2tensor(img_lq).unsqueeze(0).cuda()# 执行推理
with torch.no_grad():output = model(img_tensor)# 转换输出
img_output = tensor2img(output)
cv2.imwrite('output.jpg', img_output)
2. 自定义数据集训练
# 准备训练数据(DIV2K格式)
datasets/
├── train/
│ ├── HR/ # 高分辨率图像(2048x2048)
│ └── LR/ # 低分辨率图像(512x512)
└── val/├── HR/└── LR/# 修改配置文件
cp options/train_ESRGAN.yml options/train_ESRGAN_custom.yml
# 调整关键参数
name: ESRGAN_custom
datasets:train:name: DIV2Kdataroot_gt: datasets/train/HRdataroot_lq: datasets/train/LRscale: 4
# 启动训练
python train.py -opt options/train_ESRGAN_custom.yml
3. 视频超分处理
# 分帧处理视频
ffmpeg -i input.mp4 -qscale:v 1 frames/%04d.jpg# 批量处理帧序列
python inference_realesrgan.py -n RealESRGAN_x4plus -i frames -o frames_sr# 合成超分视频
ffmpeg -framerate 30 -i frames_sr/%04d.jpg -c:v libx264 -crf 18 output.mp4
核心技术深度解析
1. 残差密集块(RRDB)
class ResidualDenseBlock(nn.Module):def __init__(self, num_feat=64, num_grow_ch=32):super().__init__()self.conv1 = nn.Conv2d(num_feat, num_grow_ch, 3, 1, 1)self.conv2 = nn.Conv2d(num_feat + num_grow_ch, num_grow_ch, 3, 1, 1)self.conv3 = nn.Conv2d(num_feat + 2*num_grow_ch, num_grow_ch, 3, 1, 1)self.conv4 = nn.Conv2d(num_feat + 3*num_grow_ch, num_grow_ch, 3, 1, 1)self.conv5 = nn.Conv2d(num_feat + 4*num_grow_ch, num_feat, 3, 1, 1)self.lrelu = nn.LeakyReLU(negative_slope=0.2, inplace=True)def forward(self, x):x1 = self.lrelu(self.conv1(x))x2 = self.lrelu(self.conv2(torch.cat((x, x1), 1)))x3 = self.lrelu(self.conv3(torch.cat((x, x1, x2), 1)))x4 = self.lrelu(self.conv4(torch.cat((x, x1, x2, x3), 1)))x5 = self.conv5(torch.cat((x, x1, x2, x3, x4), 1))return x5 * 0.2 + x # 残差连接
2. 相对判别器(RaGAN)
class RaDiscriminator(nn.Module):def __init__(self):super().__init__()self.feature_extractor = VGG19FeatureExtractor()self.adversarial_loss = AdversarialLoss(gan_type='ragan')def forward(self, real, fake):# 提取多尺度特征real_feats = self.feature_extractor(real)fake_feats = self.feature_extractor(fake.detach())# 计算相对损失loss_real = self.adversarial_loss(real_feats, fake_feats, is_real=True)loss_fake = self.adversarial_loss(fake_feats, real_feats, is_real=False)return (loss_real + loss_fake) / 2
3. 感知损失优化
class PerceptualLoss(nn.Module):def __init__(self, layer_weights={'conv5_4': 1.0}):super().__init__()self.vgg = VGG19FeatureExtractor()self.l1_loss = nn.L1Loss()self.layer_weights = layer_weightsdef forward(self, pred, target):pred_feats = self.vgg(pred)target_feats = self.vgg(target.detach())loss = 0.0for layer in self.layer_weights:loss += self.l1_loss(pred_feats[layer], target_feats[layer]) * self.layer_weights[layer]return loss
常见问题与解决方案
1. 显存不足错误
现象:CUDA out of memory
优化策略:
# 减小批处理大小
python train.py -opt options/train.yml --batch_size 8# 启用梯度检查点
for block in model.blocks:block.enable_checkpoint = True# 降低输入分辨率
datasets:train:crop_size: 128 # 原默认256
2. 生成图像模糊
诊断与修复:
- 检查生成器初始化:
model.init_weights(pretrained='experiments/pretrained_models/RRDB_ESRGAN_x4.pth') - 调整损失权重:
# 配置文件调整 pixel_opt:type: L1Lossloss_weight: 1.0 perceptual_opt:type: PerceptualLosslayer_weights: {"conv5_4": 1.0}loss_weight: 1.0
3. 训练过程震荡
解决方案:
# 调整优化器参数
optimizer:type: Adamlr: 1e-4betas: [0.9, 0.99]# 添加学习率衰减
scheduler:type: MultiStepLRmilestones: [50000, 100000]gamma: 0.5
性能优化策略
1. 混合精度训练
python -m torch.cuda.amp.autocast_mode train.py -opt options/train.yml --amp
2. TensorRT加速
# 导出ONNX模型
python export_onnx.py --input input.pth --output esrgan.onnx# 转换TensorRT引擎
trtexec --onnx=esrgan.onnx --saveEngine=esrgan.engine --fp16 --optShapes=input:1x3x256x256
3. 多GPU并行
# 数据并行
python -m torch.distributed.launch --nproc_per_node=4 train.py -opt options/train.yml# 模型并行
model = nn.DataParallel(model, device_ids=[0,1,2,3])
学术背景与核心论文
基础论文
-
ESRGAN: Enhanced Super-Resolution Generative Adversarial Networks
Wang X, et al. ECCV 2018
提出RRDB结构和相对判别器 -
Photo-Realistic Single Image Super-Resolution Using a Generative Adversarial Network
Ledig C, et al. CVPR 2017
SRGAN原始论文,奠定感知损失基础 -
Deep Residual Learning for Image Recognition
He K, et al. CVPR 2016
残差学习的理论基础
技术突破
- 残差密集块(RRDB):结合残差连接与密集连接
- 去除批归一化(BN):避免伪影生成
- 相对判别器(RaGAN):改进对抗训练稳定性
- 频谱归一化:增强判别器约束
应用场景与未来展望
典型应用领域
- 影视修复:老电影高清化修复
- 医学成像:低分辨率CT/MRI增强
- 卫星遥感:高精度地表图像重建
- 移动摄影:手机拍照超分辨率
技术演进方向
- 视频超分:时序一致性优化
- 轻量化部署:移动端实时推理
- 多模态融合:结合深度信息
- 自监督学习:减少配对数据依赖
ESRGAN通过其创新的架构设计,将图像超分辨率技术推向了新的高度。本文提供的技术解析与实战指南,将助力开发者深入理解这一经典工具。随着生成式AI的持续发展,ESRGAN的技术思想仍将持续影响计算机视觉领域的研究与实践。