深度相机---双目深度相机
双目深度相机是一种通过模拟人类双眼视觉机制,利用立体视觉原理计算场景三维深度信息的设备。其核心价值在于以较低成本实现非接触式深度感知,广泛应用于机器人导航、AR/VR交互、工业检测、自动驾驶等领域。相比结构光、TOF等其他深度感知技术,双目相机在强光环境适应性、中等距离精度等方面具有独特优势,但也面临依赖场景纹理、计算复杂度高等问题。

一、核心原理:立体视觉与三角测量的数学本质
双目深度相机的底层逻辑源于“三角测量”(Triangulation),即通过两个已知位置的观测点(左右摄像头)与空间目标点构成三角形,利用几何关系反推目标点的三维坐标。这一过程的核心是“视差”(Disparity)的计算,而视差与深度的映射关系则依赖于相机的内外参数校准。
1. 视差:双目相机感知的核心
人类双眼观察同一物体时,左眼与右眼看到的图像存在水平方向的偏移,这种偏移即为“视差”。视差的大小与物体距离直接相关:近处物体视差大,远处物体视差小(极端情况下,无穷远处物体的视差趋近于0)。
在双目相机中,视差被定义为“空间中同一点在左、右图像中投影的水平像素坐标差值”。假设左相机中某点像素坐标为(xl,yl)(x_l, y_l)(xl,yl),右相机中对应点坐标为(xr,yr)(x_r, y_r)(xr,yr),由于经过极线校正(后文详述),左右图像的对应点在同一水平线上(即yl=yry_l = y_ryl=yr),因此视差可简化为:
d=xL−xRd = x_L - x_R d=xL−xR
(ddd为视差,单位为像素;d>0d>0d>0表示左图中该点在右图对应点右侧)
2. 三角测量公式:从视差到深度的映射
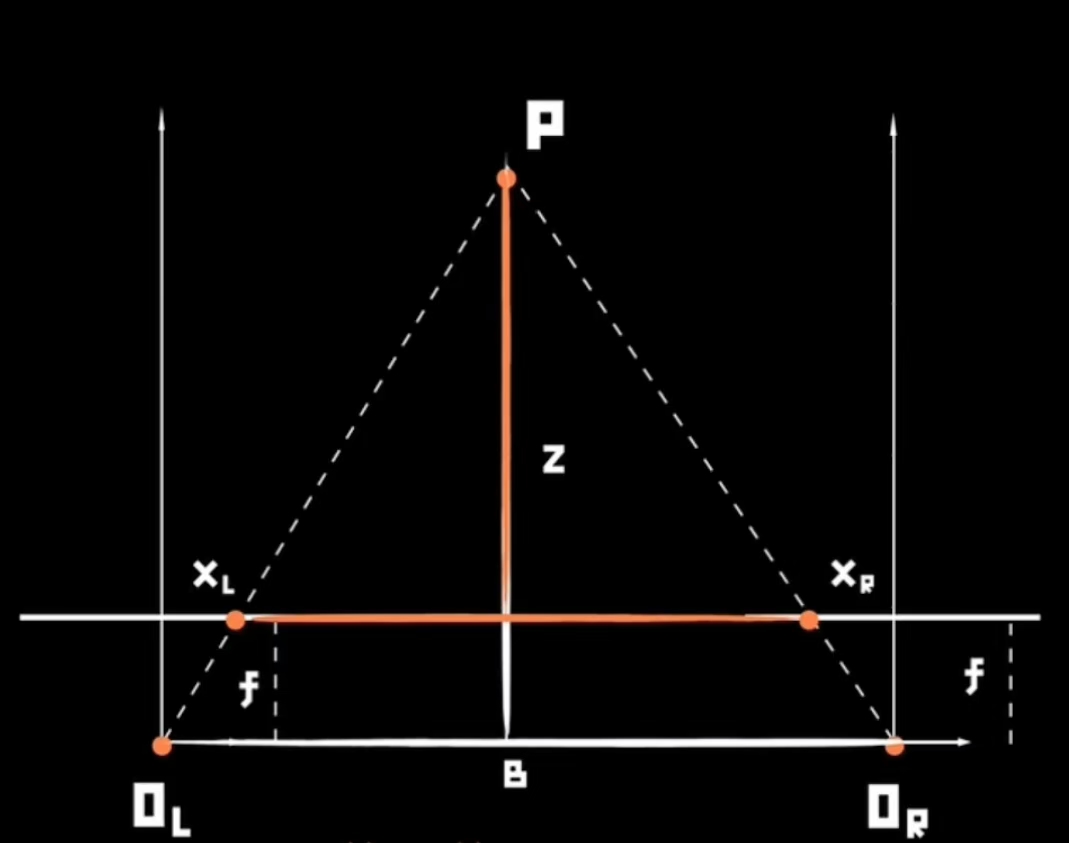
深度计算的几何基础是“基线-焦距-视差”三角关系。如图所示(示意图),左右相机光心分别为OLO_LOL和ORO_ROR,两者之间的距离为基线BBB(单位:mm);两相机焦距均为fff(单位:mm,镜头到成像平面的距离);空间点PPP在左、右成像平面上的投影分别为XlX_lXl和XrX_rXr,对应像素坐标的水平差值为视差ddd(单位:像素)。
根据相似三角形原理(△OLORP∼△PlPrP\triangle O_L O_R P \sim \triangle P_l P_r P△OLORP∼△PlPrP),可推导出空间点PPP到相机平面的深度zzz(单位:mm)为:
z=B⋅fdz = \frac{B \cdot f}{d} z=dB⋅f
公式解读:
- 深度ZZZ与基线BBB、焦距fff成正比:基线越长、焦距越大,相同视差下的深度测量越精确(尤其适合远距离场景)。
- 深度ZZZ与视差ddd成反比:视差越小(物体越远),深度计算对ddd的误差越敏感(例如,d=1d=1d=1像素时,ddd的±1像素误差会导致ZZZ的±100%误差)。
3. 极线几何:简化匹配的数学基础
极线和极平面参考OpenCV的这篇文档
未经校正的双目图像中,空间点在左右图像中的投影可能分布在不同水平线上,导致对应点搜索需遍历全图像,计算量极大。“极线几何”(Epipolar Geometry)通过定义“极线”(Epipolar Line)解决这一问题:空间点在左图中的投影点,其在右图中的对应点必定落在一条特定的直线(极线)上。 (极线约束定理)
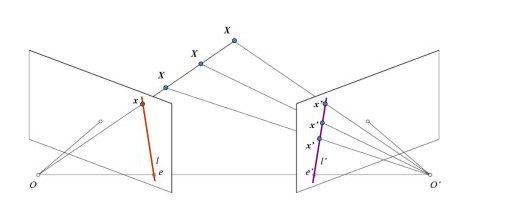
极线几何的核心参数包括:
- 极点(Epipole):左相机光心OlO_lOl在右图上的投影为右极点ere_rer,右相机光心OrO_rOr在左图上的投影为左极点ele_lel。
- 极平面(Epipolar Plane):由OlO_lOl、OrO_rOr和空间点PPP构成的平面,与左右成像平面的交线即为极线。
通过相机标定获取内参(焦距、主点、畸变系数)和外参(旋转矩阵RRR、平移向量TTT)后,可通过“极线校正”将左右图像的极线调整为水平且共线(即同一行),此时对应点搜索仅需在同一水平线上进行,计算量降低90%以上。
二、硬件结构
双目相机的硬件设计需满足“空间同步”(基线固定)和“时间同步”(曝光同步)两大核心要求,否则会直接破坏视差计算的几何基础。其硬件结构可分为五大核心模块,各模块的精度与协同性决定了最终深度图的质量。
1. 双摄像头模组:视觉感知的“双眼”
双摄像头是图像采集的核心,其参数一致性和空间排布直接影响深度精度:
- 参数一致性:左右相机需严格匹配焦距(误差需<1%)、分辨率(如1280×720、2560×1440)、像元尺寸(如3.0μm×3.0μm)、畸变特性(径向畸变<1%,切向畸变<0.5%)。参数不匹配会导致校正后极线仍存在偏差,增加匹配难度。
- 空间排布:通常采用水平平行排布(基线方向为X轴),基线长度BBB根据应用场景设计:近距离场景(如AR手势交互)用短基线(5-15cm),中远距离场景(如机器人导航)用长基线(20-50cm)。基线偏差(如垂直方向倾斜>0.1°)会引入额外视差误差,需通过机械结构(如精密导轨)保证平行度。
- 传感器类型:主流采用CMOS传感器(相比CCD成本低、帧率高),需支持全局快门(Global Shutter)——避免滚动快门(Rolling Shutter)导致的动态场景图像扭曲(如快速移动的物体在左右图中形状错位)。
2. 同步控制模块:时间一致性的“保障”
左右相机必须在同一时刻曝光,否则动态场景中物体的运动会导致视差计算错误(例如,汽车行驶中,不同步的左右图像会使同一车辆在两图中位置偏移,产生虚假视差)。同步方式分为:
- 硬件同步:通过触发信号(如GPIO脉冲)强制左右相机同时开启曝光,同步误差可控制在<10μs,适合高速动态场景(如自动驾驶)。
- 软件同步:通过系统时钟校准曝光时刻,同步误差通常>1ms,仅适合静态场景(如工业检测)。
3. 镜头模组:成像质量的“窗口”
镜头的光学性能直接影响图像清晰度和纹理保留,进而影响立体匹配精度:
- 焦距与视场角:短焦距(如8mm)适合广角场景(视场角>90°),但远距离视差小、精度低;长焦距(如25mm)视场角窄(<30°),但远距离视差更明显,适合长焦场景。
- 畸变控制:鱼眼镜头畸变率高(>10%),需通过算法校正;工业级镜头畸变率可控制在<1%,减少校正负担。
- 光圈与曝光:大光圈(如F/1.8)适合弱光环境,但景深小(易导致前后景失焦);小光圈(如F/4.0)景深大,但进光量少,需提高ISO(可能引入噪声)。
4. 校准模块:参数精度的“基准”
出厂前需通过“相机标定”获取内参和外参,这是后续图像校正和深度计算的前提。标定流程基于张正友标定法:
- 用双目相机拍摄不同姿态的棋盘格标定板(至少10组图像);
- 通过角点检测计算棋盘格在图像中的像素坐标,结合已知的物理尺寸(如棋盘格方格边长20mm),反推内参(内参矩阵K=[fx0cx0fycy001]K = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix}K=fx000fy0cxcy1,其中fx=f/dxf_x = f / dxfx=f/dx、fy=f/dyf_y = f / dyfy=f/dy为像素焦距,cx,cyc_x, c_ycx,cy为主点坐标,dx,dydx, dydx,dy为像元尺寸)和外参(旋转矩阵RRR、平移向量TTT);
- 计算畸变系数(径向畸变k1,k2,k3k_1, k_2, k_3k1,k2,k3和切向畸变p1,p2p_1, p_2p1,p2),用于校正镜头畸变。
标定精度要求:内参误差<0.5%,外参旋转角误差<0.1°,平移向量(基线)误差<0.1mm,否则会导致深度计算误差随距离呈线性放大(例如,基线误差1mm,在10m距离处深度误差可达0.1m)。
5. 计算与传输模块:深度输出的“引擎”
立体匹配算法计算量大(如1280×720分辨率图像,SGBM算法单次匹配需10^8次运算),需专用硬件加速:
- FPGA:适合并行处理(如块匹配中的窗口计算),延迟低(<10ms),但开发难度高;
- ASIC:定制化电路(如Intel Movidius Myriad X),功耗低(<5W),适合嵌入式设备;
- GPU:适合深度学习匹配算法(如PSMNet),通过CUDA并行加速,精度高但功耗大(>20W)。
传输接口需满足高带宽需求(如1280×720@30fps的RGB图像,单路数据量约80Mbps,双路+深度图需>200Mbps),常用USB3.0(5Gbps)、GMSL(6Gbps)或Ethernet(10Gbps)。
三、工作流程:从图像到深度的全链路解析
双目相机的工作流程可分为“1.图像采集-2.校正-3.匹配-4.深度计算-5.后处理”五大步骤,每一步的精度都会直接影响最终深度图质量。
1. 图像采集:原始数据的获取
左右相机在同步信号触发下,对同一场景进行曝光成像,输出左图IlI_lIl和右图IrI_rIr(RAW格式或RGB格式)。需注意:
- 动态场景中,若同步误差>物体运动的像素距离(如车速10m/s,同步误差1ms,物体在图像中偏移约3像素),会导致视差计算错误;
- 弱光环境下,需开启红外补光灯(波长850nm,避免可见光干扰),但补光不均匀会导致图像亮度差异,增加匹配难度。
2. 图像校正:极线对齐的关键一步
未经校正的图像存在畸变和极线倾斜,需通过两步处理将其转换为“理想立体图像对”:
- 畸变校正:利用内参中的畸变系数,对左右图像进行几何修正(如径向畸变校正公式:xcorr=x⋅(1+k1r2+k2r4+k3r6)+2p1xy+p2(r2+2x2)x_{corr} = x \cdot (1 + k_1 r^2 + k_2 r^4 + k_3 r^6) + 2 p_1 xy + p_2 (r^2 + 2x^2)xcorr=x⋅(1+k1r2+k2r4+k3r6)+2p1xy+p2(r2+2x2),其中r2=x2+y2r^2 = x^2 + y^2r2=x2+y2);
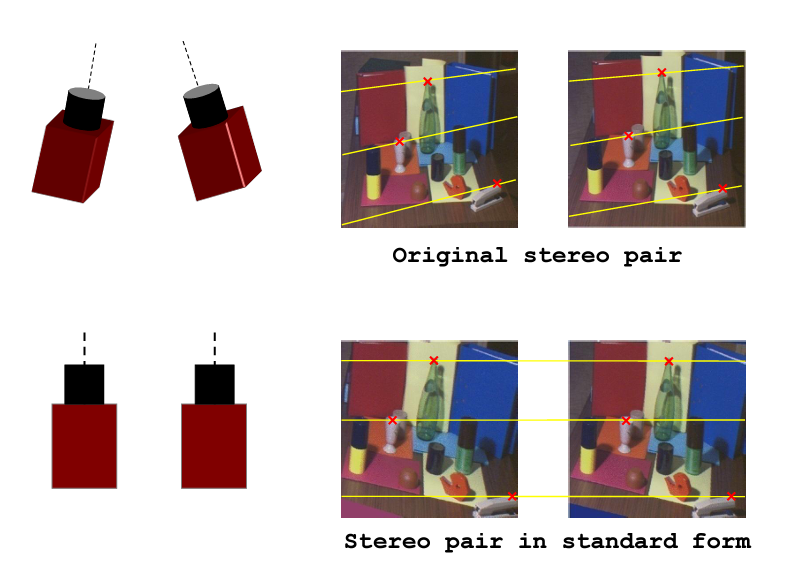
- 极线校正:根据外参RRR和TTT,计算校正矩阵(通过单应性变换Hl,HrH_l, H_rHl,Hr),将左右图像映射到同一平面,使极线水平对齐(即yl=yry_l = y_ryl=yr)。校正后,对应点搜索范围从全图像压缩到同一行,效率提升10倍以上。
我们双目相机拍摄的时候实际情况下如下图a,两个图像做匹配时如我们图中蓝色箭头指示的匹配点那样,需要在全图中进行查找。但是如果我们对相机进行校正,使得它们成像面平行且行对齐如下图b,匹配点在同一行。那么我们只需在同行上查找,大大节约时间。因此,极线校正目的是对两幅图像的二维匹配搜索变成一维,节省计算量,排除虚假匹配点。
3. 立体匹配:视差计算的核心
立体匹配的目标是为左图每个像素(x,y)(x, y)(x,y)在右图同一行yyy上找到最相似的像素,得到视差ddd。这是双目相机最复杂的步骤,算法需平衡精度、速度和鲁棒性:
-
传统算法:
- BM(Block Matching):以左图像素为中心取n×nn×nn×n窗口(如5×5、9×9),在右图对应行滑动窗口计算相似度(如SSD:∑(Il−Ir)2\sum (I_l - I_r)^2∑(Il−Ir)2),取最小值对应的位置为匹配点。优点是速度快(适合FPGA实现),缺点是弱纹理区域易匹配错误,窗口尺寸需根据场景调整(小窗口适合细节,大窗口抗噪声)。
- SGBM(Semi-Global Block Matching):在BM基础上引入全局能量函数(E=∑(D(x)+P1⋅∣d(x)−d(x−1)∣+P2⋅large difference)E = \sum (D(x) + P1 \cdot |d(x)-d(x-1)| + P2 \cdot \text{large difference})E=∑(D(x)+P1⋅∣d(x)−d(x−1)∣+P2⋅large difference)),通过动态规划在8个方向优化匹配结果,平衡局部匹配的噪声和全局一致性。精度优于BM(误差<3%@5m),但计算量增加3倍。
-
深度学习算法:
- PSMNet(Pyramid Stereo Matching Network):通过金字塔特征提取(左图和右图分别提取多尺度特征),构建4D代价体(H×W×D×CH×W×D×CH×W×D×C,DDD为视差范围),用3D卷积进行代价聚合,最后通过softmax输出视差。在弱纹理、遮挡区域表现优于传统算法(误差<2%@5m),但计算量是SGBM的10倍以上,需GPU支持。
4. 深度计算:从视差到三维坐标的转换
根据三角测量公式Z=B⋅fdZ = \frac{B \cdot f}{d}Z=dB⋅f,将视差图转换为深度图。需注意单位转换:
- 像素焦距fx=f/dxf_x = f / dxfx=f/dx(dxdxdx为像元尺寸,单位mm/像素),因此f=fx⋅dxf = f_x \cdot dxf=fx⋅dx,代入公式得Z=B⋅fx⋅dxd=B⋅fxd⋅dxZ = \frac{B \cdot f_x \cdot dx}{d} = \frac{B \cdot f_x}{d} \cdot dxZ=dB⋅fx⋅dx=dB⋅fx⋅dx。实际应用中,厂商通常通过标定将B⋅fx⋅dxB \cdot f_x \cdot dxB⋅fx⋅dx预计算为“尺度因子”,直接用Z=scale/dZ = \text{scale} / dZ=scale/d计算深度(单位m)。
5. 后处理:深度图的优化与修复
原始深度图存在三类问题:匹配错误(噪声)、遮挡/弱纹理导致的空洞、边缘模糊。后处理步骤包括:
- 噪声去除:中值滤波(去除椒盐噪声)、双边滤波(保留边缘的同时平滑噪声);
- 空洞填充:对遮挡区域(视差超出范围),采用邻域插值(如基于左右一致性检测,用可信区域的深度值填充);
- 边缘优化:结合原图边缘信息(如Canny边缘检测),对深度图边缘进行锐化,减少物体边缘的深度模糊。
四、精度与鲁棒性的相关问题
1. 立体匹配的鲁棒性困境
匹配错误是深度图误差的主要来源,根源在于场景特性与算法局限:
- 弱纹理区域:如白墙、纯色桌面,图像梯度接近0,不同位置的窗口相似度差异小,易导致随机匹配(例如,白墙区域可能出现深度跳变)。解决方案:引入语义信息(如深度学习算法利用上下文特征),或主动投射纹理图案(混合结构光与双目技术)。
- 重复纹理区域:如砖块墙、格栅,多个位置的窗口特征高度相似,算法难以区分真实对应点(视差误差可能达10像素以上)。解决方案:增加匹配窗口的尺寸(利用全局特征),或结合运动视差(通过多帧图像优化)。
- 遮挡区域:前景物体遮挡背景(如人站在墙前),被遮挡区域在另一幅图像中无对应点,导致深度空洞(占比可达10-20%)。解决方案:基于左右一致性检测(左图视差与右图反投影视差差异>阈值则标记为遮挡),用背景填充或多帧融合修复。

2. 校准精度的稳定性难题
相机参数会随环境变化漂移,导致深度精度下降:
- 温度漂移:温度变化10℃,镜头焦距可能变化0.1%(如25mm焦距变为25.025mm),基线因机械结构热胀冷缩变化0.05mm,在10m距离处深度误差可达0.1m。
解决方案:采用低膨胀系数材料(如殷钢)制作基线结构,或通过在线标定(实时检测棋盘格或自然特征)动态更新参数。 - 振动与冲击:车载、机器人等场景中,振动可能导致左右相机相对姿态变化(如旋转0.5°),极线校正失效,视差计算误差增大。
解决方案:用刚性结构固定相机(如金属支架),或集成IMU(惯性测量单元),通过运动补偿修正姿态变化。
3. 实时性与精度的平衡矛盾
高分辨率与高精度需求导致计算量爆炸:
- 分辨率与帧率的权衡:1280×720图像的SGBM算法在FPGA上可实现30fps,但升级到2560×1440后帧率降至10fps以下;深度学习算法在GPU上处理1280×720图像需20ms/帧,难以满足实时性(<33ms)。
解决方案:采用“感兴趣区域(ROI)匹配”(仅对前景目标计算深度),或降采样处理(牺牲边缘精度换取速度)。 - 硬件成本的限制:FPGA/ASIC开发成本高(百万级人民币),中小厂商难以承担;GPU方案功耗大(>20W),无法用于电池供电设备(如手持AR设备)。
解决方案:探索轻量级深度学习模型(如MobileStereoNet),通过模型压缩降低计算量。
4. 深度范围的固有局限
基线固定导致双目相机的有效深度范围受限:
- 近距离盲区:当物体距离Z<Zmin=B⋅fdmaxZ < Z_{\text{min}} = \frac{B \cdot f}{d_{\text{max}}}Z<Zmin=dmaxB⋅f(dmaxd_{\text{max}}dmax为最大可测视差,通常为图像宽度的1/2),视差超出搜索范围,无法匹配。例如,基线10cm、焦距16mm、图像宽度1280像素,Zmin≈0.25mZ_{\text{min}} \approx 0.25mZmin≈0.25m,更近的物体(如20cm)会成为盲区。
- 远距离精度衰减:当Z>Zmax=B⋅fdminZ > Z_{\text{max}} = \frac{B \cdot f}{d_{\text{min}}}Z>Zmax=dminB⋅f(dmin=1d_{\text{min}}=1dmin=1像素),视差d=1d=1d=1像素,此时ddd的±1像素误差会导致ZZZ的±100%误差。例如,基线10cm、焦距16mm,Zmax≈16mZ_{\text{max}} \approx 16mZmax≈16m,20m处的深度误差可能达±10m。
解决方案:采用多基线设计(如双基线相机,近距离用短基线,远距离用长基线),通过切换基线或融合多组深度图扩展有效范围,但会增加硬件复杂度和成本。