数据结构--AVL树
1、基本概念
AVL 树是一种自平衡二叉搜索树。
- 定义:AVL 树是一种高度平衡的二叉搜索树,它在满足二叉搜索树性质的基础上,通过自动调整树的结构,确保树的高度在任何时候都保持在对数级别,从而保证了高效的查找、插入和删除操作。AVL 树得名于其发明者 G. M. Adelson - Velsky 和 E. M. Landis。
- 平衡因子:这是 AVL 树的一个关键概念。对于树中的每个节点,其平衡因子定义为该节点的右子树高度减去左子树高度(左子树减去右子树也可以)。在 AVL 树中,所有节点的平衡因子只能是 - 1、0 或 1。如果某个节点的平衡因子超出了这个范围,就说明树失去了平衡,需要进行调整。
- 调整操作:当插入或删除节点导致 AVL 树失去平衡时,需要通过特定的旋转操作来恢复平衡。主要有四种旋转操作,分别是左旋、右旋、先左旋后右旋、先右旋后左旋。这些旋转操作会改变节点之间的连接关系,以调整树的高度和结构,使树重新达到平衡状态。
- 其基本结构如下:
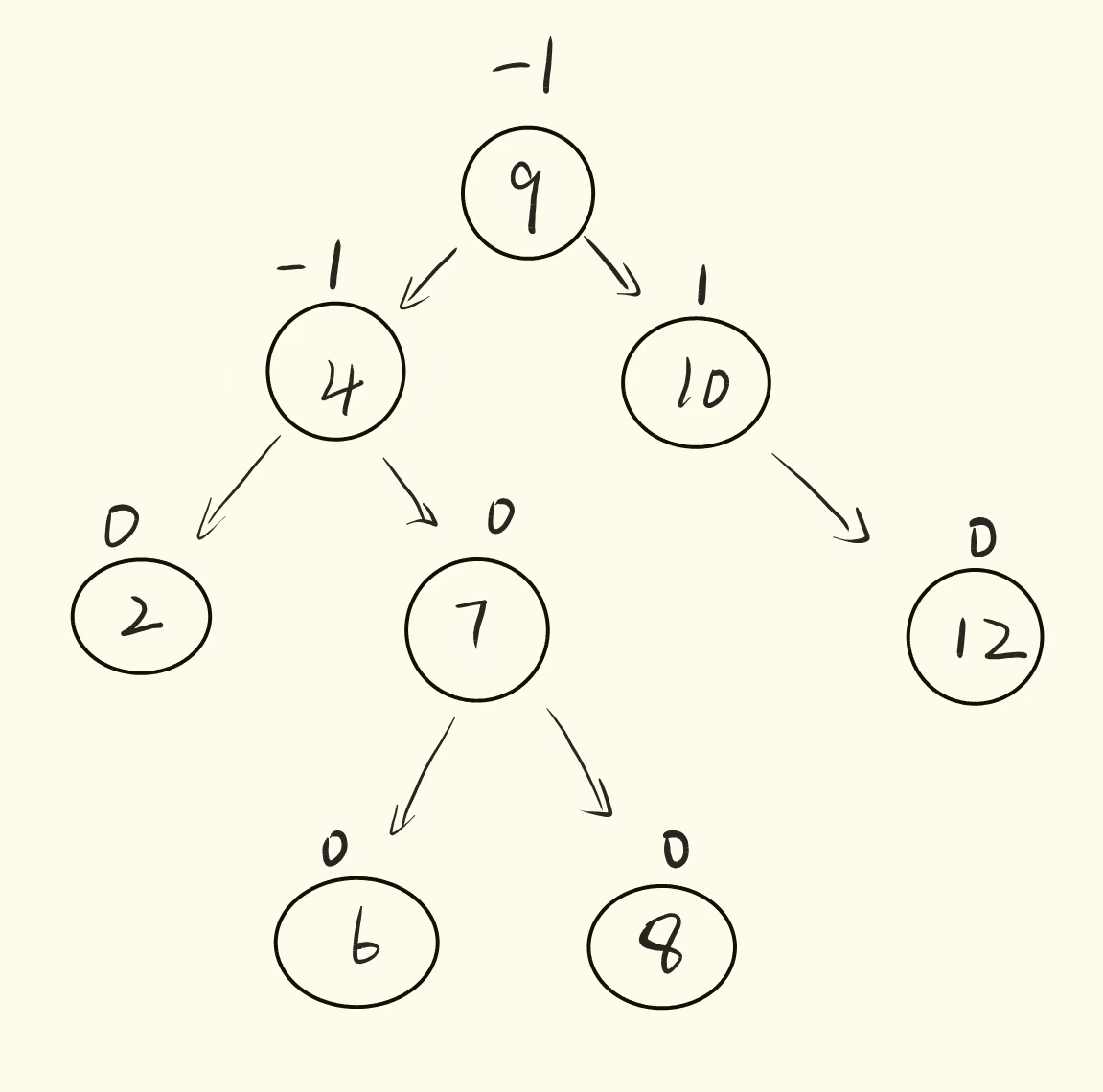
struct AVLTreeNode {AVLTreeNode(const T& data = T()): _pLeft(nullptr), _pRight(nullptr), _pParent(nullptr), _data(data), _bf(0){}AVLTreeNode<T>* _pLeft;AVLTreeNode<T>* _pRight;AVLTreeNode<T>* _pParent;T _data;int _bf; // 节点的平衡因子 };图示如下:
-
2、AVL树的插入(不允许重复插入)
AVL树的插入可以分作三个步骤:
步骤 1:按二叉搜索树规则插入新节点
- 从根节点开始,将新节点的值与当前节点的值进行比较。
- 如果新节点的值小于当前节点的值,则在当前节点的左子树中继续查找插入位置;如果新节点的值大于当前节点的值,则在当前节点的右子树中继续查找。
- 重复上述比较过程,直到找到一个空位置,将新节点插入该位置。
图示:
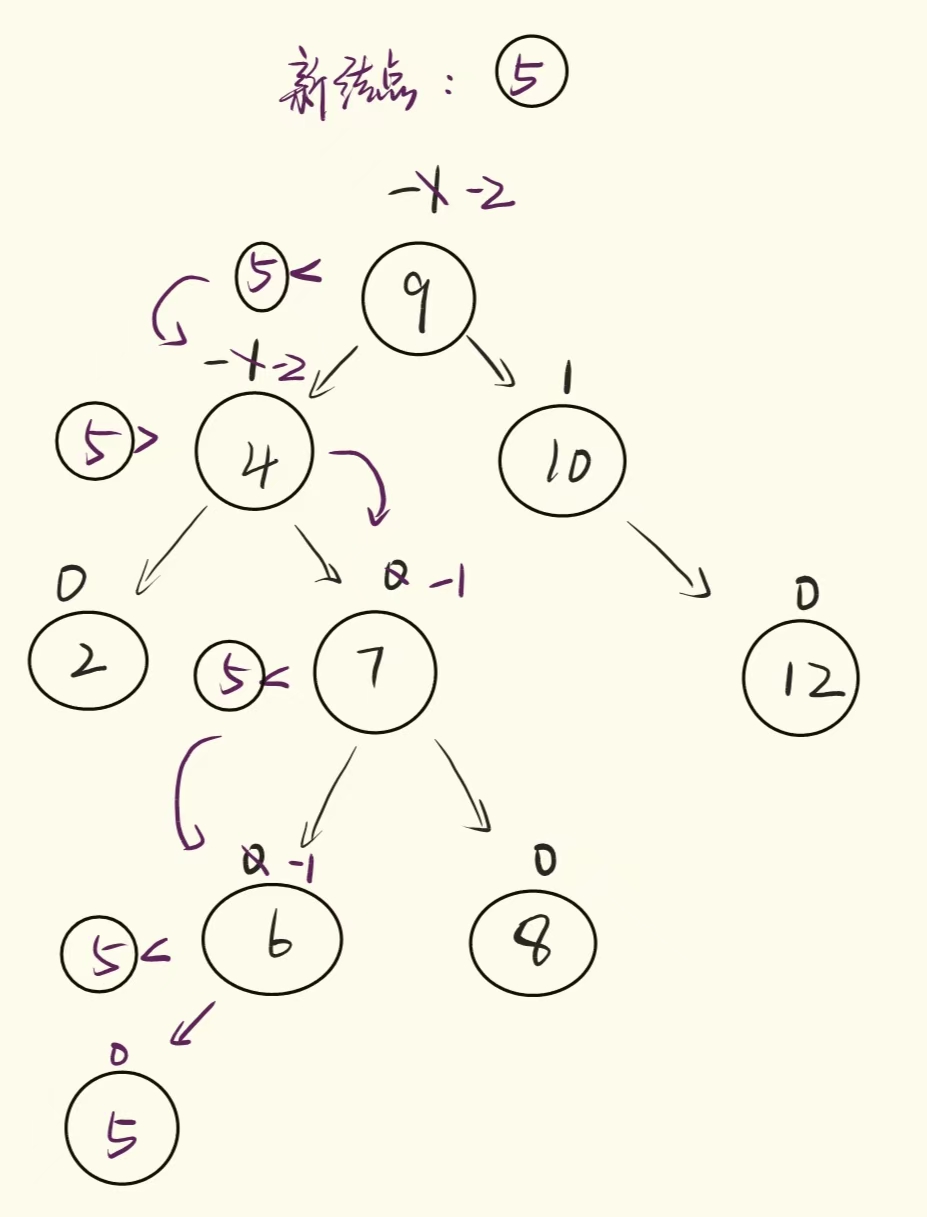
步骤 2:更新平衡因子并检查平衡
- 从插入的新节点开始,向上更新其所有祖先节点平衡因子。节点的平衡因子是该节点的右子树高度减去左子树高度。
- 如果某个节点的平衡因子的绝对值大于 1,说明 AVL 树的平衡被破坏,需要进行旋转操作来恢复平衡。
步骤 3:旋转操作恢复平衡
根据不平衡的情况,AVL 树有四种旋转操作:
其中需要注意的是,在左右双旋和右左双旋时,需要进行分类讨论,由于第一次单旋中其左/右子树平衡因子的不同,会导致最后平衡因子更新不同,有兴趣的可以动手试验一下。
LL(左左)旋转(右旋):当某个节点的平衡因子为 2,且其左子节点的平衡因子为 1 时,需要进行右旋操作。
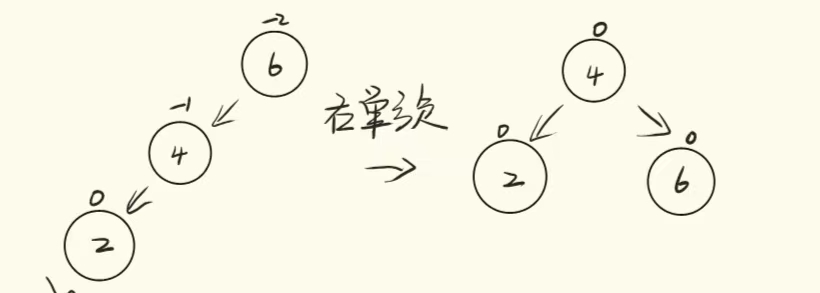
简单示例代码:
// 右单旋
void RotateR(Node* pParent)
{
//记录非法平衡因子节点的左子树及其左子树的右子树Node* subL = pParent->_pLeft;Node* subLR = subL->_pRight;pParent->_pLeft = subLR;if (subLR)subLR->_pParent = pParent;Node* p_parent = pParent->_pParent;subL->_pRight = pParent;pParent->_pParent = subL;
//不平衡节点为根节点if (p_parent == nullptr){_pRoot = subL;subL->_pParent = nullptr;}else{if (pParent == p_parent->_pLeft){p_parent->_pLeft = subL;}else{p_parent->_pRight = subL;}subL->_pParent = p_parent;}
//更新平衡因子subL->_bf = 0;pParent->_bf = 0;
}RR(右右)旋转(左旋):当某个节点的平衡因子为 -2,且其右子节点的平衡因子为 -1 时,需要进行左旋操作。
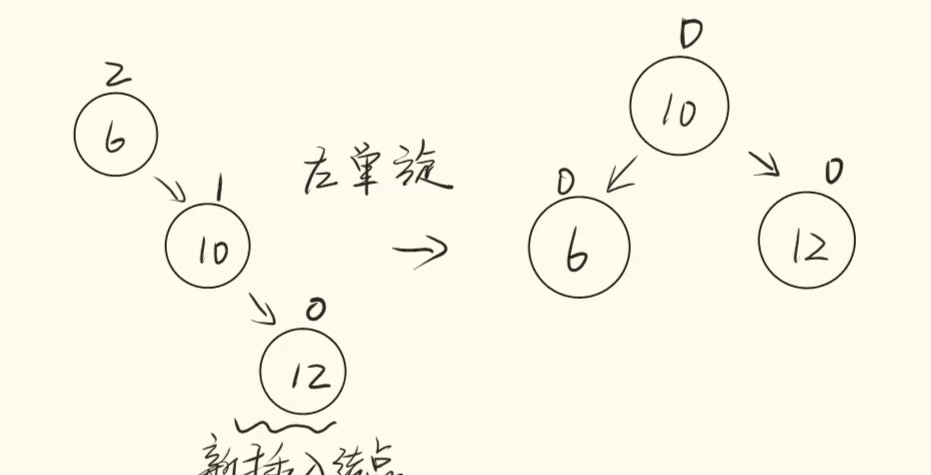
简单示例代码:
// 左单旋
void RotateL(Node* pParent)
{Node* subR = pParent->_pRight;Node* subRL = subR->_pLeft;pParent->_pRight = subRL;if (subRL)subRL->_pParent = pParent;Node* p_parent = pParent->_pParent;subR->_pLeft = pParent;pParent->_pParent = subR;
//不平衡节点为根节点if (p_parent == nullptr){_pRoot = subR;subR->_pParent = nullptr;}else{if (pParent == p_parent->_pLeft){p_parent->_pLeft = subR;}else{p_parent->_pRight = subR;}subR->_pParent = p_parent;}
//更新平衡因子subR->_bf = 0;pParent->_bf = 0;
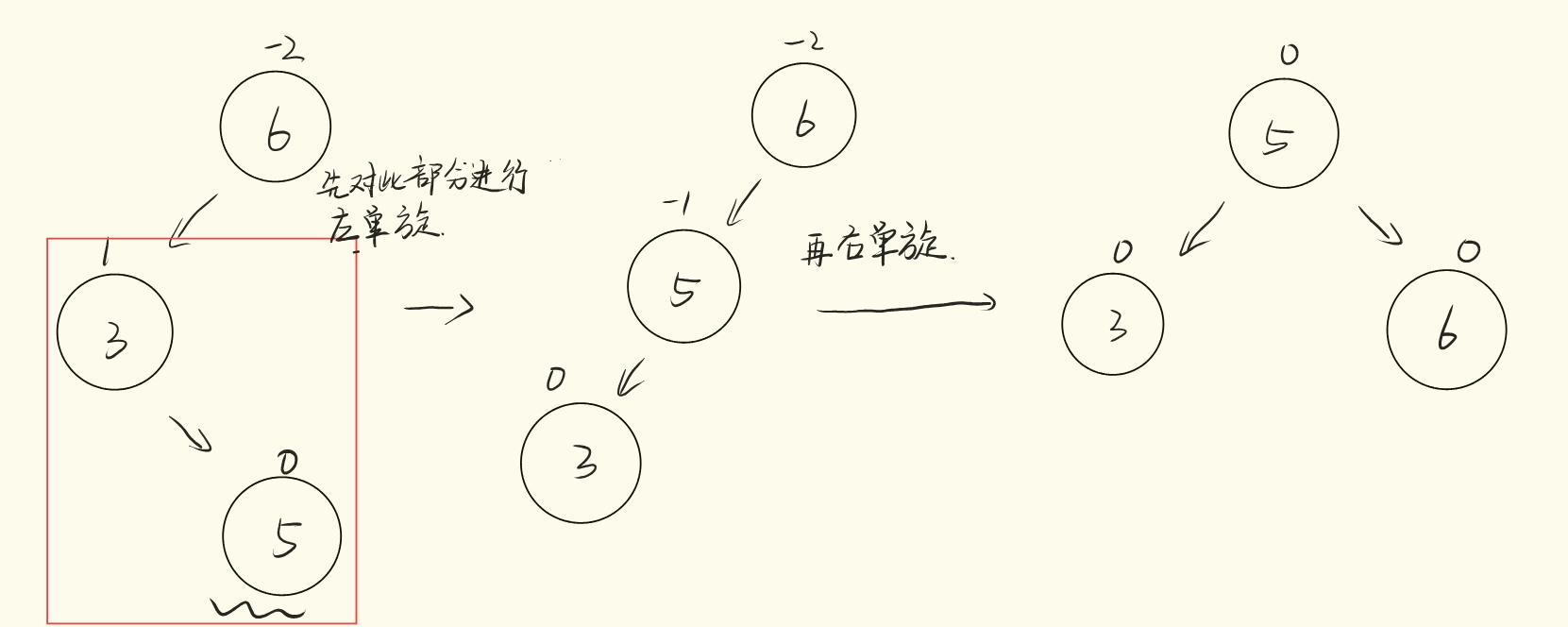
}LR(左右)旋转:当某个节点的平衡因子为 2,且其左子节点的平衡因子为 -1 时,先对左子节点进行左旋,再对该节点进行右旋。
简单示例代码:
// 左右双旋
void RotateLR(Node* pParent)
{Node* subL = pParent->_pLeft;Node* subLR = subL->_pRight;int bf = subLR->_bf;RotateL(pParent->_pLeft);RotateR(pParent);//旋转后也有三种情况,需要分类讨论if (bf == 0){subL->_bf = 0;subLR->_bf = 0;pParent->_bf = 0;}else if (bf == 1){subL->_bf = -1;subLR->_bf = 0;pParent->_bf = 0;}else if (bf == -1){subL->_bf = 0;subLR->_bf = 0;pParent->_bf = 1;}else{cout << "4" << endl;assert(false);}
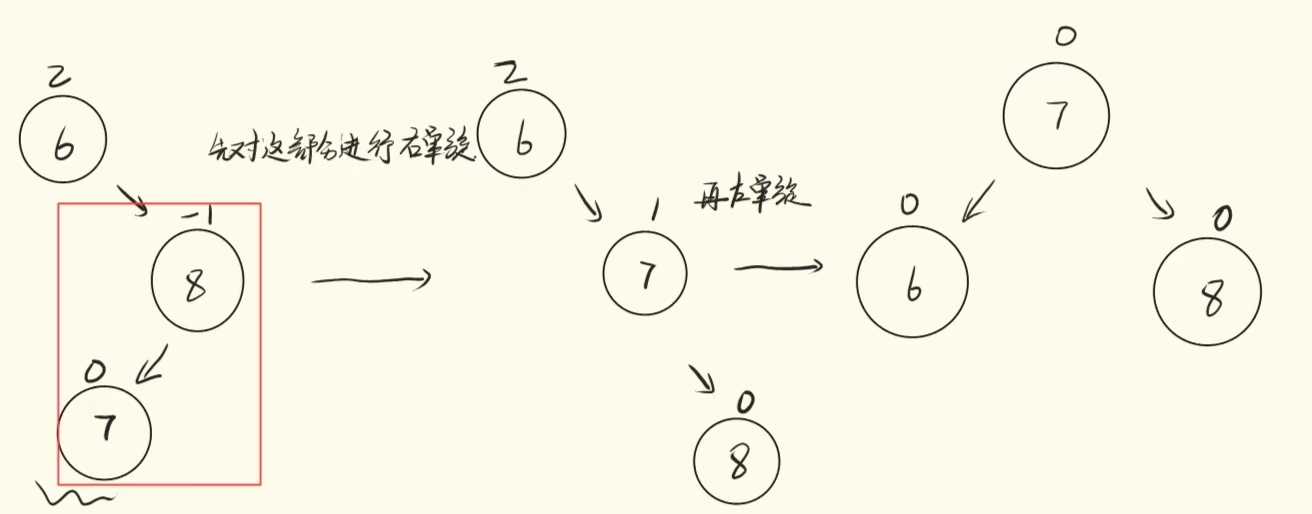
}RL(右左)旋转:当某个节点的平衡因子为 -2,且其右子节点的平衡因子为 1 时,先对右子节点进行右旋,再对该节点进行左旋。
简单示例代码:
// 右左双旋
void RotateRL(Node* pParent)
{Node* subR = pParent->_pRight;Node* subRL = subR->_pLeft;int bf = subRL->_bf;RotateR(pParent->_pRight);RotateL(pParent);//一共有三种情况//bf = 1 -1 0//这三种情况旋转后的subR subRL pParent的bf会有变化if (bf == 0){subR->_bf = 0;subRL->_bf = 0;pParent->_bf = 0;}else if (bf == 1){subR->_bf = 0;subRL->_bf = 0;pParent->_bf = -1;}else if(bf == -1){subR->_bf = 1;subRL->_bf = 0;pParent->_bf = 0;}else{cout << "3" << endl;assert(false);}
}3.AVL树的查找
AVL 树本质上是一种二叉搜索树,所以其查找操作和普通二叉搜索树的查找操作基本一致。查找的核心思想是利用二叉搜索树的特性,即左子树所有节点的值小于根节点的值,右子树所有节点的值大于根节点的值,通过不断比较和递归或迭代的方式缩小查找范围,直到找到目标节点或者确定目标节点不存在。
查找步骤
- 从根节点开始:将目标值与根节点的值进行比较。
- 比较判断:
- 如果目标值等于根节点的值,那么查找成功,返回该节点。
- 如果目标值小于根节点的值,由于二叉搜索树的性质,目标节点只可能在左子树中,因此进入左子树继续查找。
- 如果目标值大于根节点的值,目标节点只可能在右子树中,进入右子树继续查找。
- 重复步骤 2:在子树中继续进行比较,不断缩小查找范围,直到找到目标节点或者到达空节点。
- 查找失败:如果到达空节点还未找到目标值,说明目标值不在 AVL 树中,查找失败。
简单代码实现:
bool Find(const T& key)
{Node* cur = _pRoot;while (cur){if (cur->_data < key){cur = cur->_pRight;}else if (cur->_data > key){cur = cur->_pLeft;}else{return true;}}return false;
}4.AVL树的平衡检测
AVL 树的平衡性是其高效性能的保障,平衡性检查的目的是确保树中每个节点的平衡因子都在 -1 到 1 的范围内。如果某个节点的平衡因子超出这个范围,就需要通过旋转操作来恢复树的平衡。
平衡性检查步骤
- 计算平衡因子:对于树中的每个节点,计算其平衡因子,平衡因子定义为左子树的高度减去右子树的高度。
- 检查平衡因子范围:检查每个节点的平衡因子是否在 -1 到 1 的范围内。
- 递归检查:对每个节点的左右子树也进行同样的平衡性检查。
- 处理不平衡情况:如果发现某个节点的平衡因子超出了 -1 到 1 的范围,根据不平衡的类型(LL、RR、LR、RL)进行相应的旋转操作来恢复平衡。
简单代码示例:
// 根据AVL树的概念验证pRoot是否为有效的AVL树
bool _IsAVLTree(Node* pRoot)
{if (pRoot == nullptr)return true;int lh = _Height(pRoot->_pLeft);int rh = _Height(pRoot->_pRight);int diff = rh - lh;//左右子树高度差超过2if (abs(diff) >= 2){cout << "高度差异常" << endl;return false;}//平衡因子与计算出的不同if (pRoot->_bf != diff){cout << "平衡因子错误" << endl;return false;}//左右子树都是avl树,则该树是avl树return _IsAVLTree(pRoot->_pLeft) && _IsAVLTree(pRoot->_pRight);
}