实战指南:步进电机规格书参数解析——以28BYJ48为例(不聊原理,只讲应用)
前言:为什么写这篇?
网上讲解步进电机原理的文章铺天盖地,但当你拿到一份电机规格书时,面对诸如“牵出频率≥1000Hz”,“自定位转矩≥300gf·cm”等参数,是否仍感到一头雾水?本文以常见的28BYJ48减速步进电机规格书为例,跳过原理,直击参数的实际意义与应用陷阱,助你快速选型、避免踩坑。
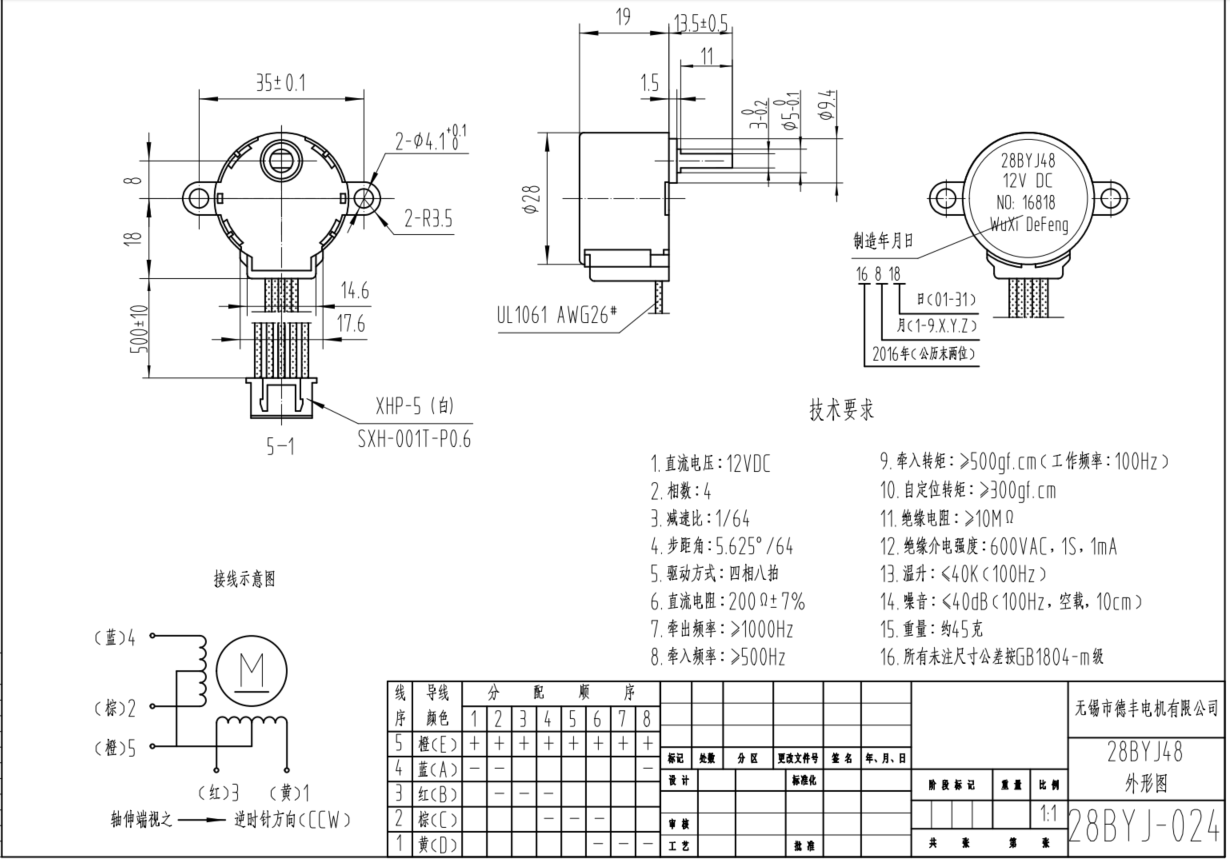
示例规格书
让我们先看一下规格书内容,大家先自行试着理解一下各规格参数。
一、机械参数:安装即用的关键
| 参数 | 应用意义 | 避坑提示 |
|---|---|---|
35±0.1 | 电机本体长度,影响安装空间设计(公差±0.1mm) | 预留至少0.5mm余量,防止装配干涉 |
2-Φ4.1 | 两个安装孔直径Φ4.1mm | 使用M4螺丝固定时需加垫片防松动 |
XHP-5 (白) | 接线端子标准型号 | 确认接口与设备结构兼容 |
其他机械参数自行分析,不过多讲解
二、电气参数:驱动设计的核心
| 参数 | 应用意义 | 计算公式/示例 |
|---|---|---|
| 12V DC | 额定电压(不可超压!) | 电压波动此规格书未写,默认按:<±10%(即10.8~13.2V) |
| 线圈电阻200Ω | 决定工作电流: I = V R = 12 V 200 Ω = 60 m A I = \frac{V}{R} = \frac{12V}{200Ω} = 60mA I=RV=200Ω12V=60mA | 驱动器需支持≥60mA/相的输出能力 |
| 相数:4 | 电机内部有4组独立线圈(A、B、C、D相) | 需匹配四相驱动器(如ULN2003) |
| 驱动方式:4相8拍 | 采用半步控制(8拍/周期),比全步(4拍/周期)更平滑,但扭矩降低约30% | - 优点:振动小,适合精密定位 - 缺点:需双倍脉冲数 |
| 步距角5.625°/64 | 内部转子单步移动角度5.625°/64≈0.08789°(实际是64细分后的输出值) | 内部转子1圈需64步(360°/5.625°=64) |
| 减速比1/64 | 输出轴转速降低64倍,扭矩提升≈64倍(理论值,忽略效率损失) | 内部转子转64圈,输出轴转1圈 |
输出轴转一圈360°需要:64 × (360°/5.625°) = 4096步(一步即一拍子)
(全步控制仅需2048步)
三、选型成败的决定因素
1. 性能参数
| 参数 | 应用意义 | 实测场景 |
|---|---|---|
| 牵入频率≥500Hz | 直接启动的最高脉冲频率(单位:步/秒) | 若需100Hz启动,可直接给脉冲;若>500Hz需加速启动 |
| 牵出频率≥1000Hz | 运行中不失步的最高脉冲频率 | 短时脉冲超频可能导致堵转失步 |
| 牵入转矩≥500gf·cm | 启动瞬间的负载能力(约4.9mN·m) | 工作频率100Hz时测量(对应转速9.375 RPM) |
| 自定位转矩≥300gf·cm | 断电后的自锁力(防移位) | 垂直安装时需此参数计算防滑需求 |
| 温升≤40K (100Hz) | 连续运行时的发热极限(温升=线圈温度-环境温度) | 密闭环境中需强制散热 |
2. 安全与可靠性参数
| 参数 | 应用意义 | 测试标准 |
|---|---|---|
| 绝缘电阻 >10MΩ | 线圈与外壳间的绝缘性能(防漏电/短路) | 用兆欧表测量(500VDC加压1分钟) |
| 绝缘介电强度 600VAC/1s/1mA | 耐高压能力:线圈与外壳间可承受600V交流电1秒不击穿(漏电流<1mA) | 安规测试仪验证(UL/IEC标准) |
| 噪声 ≤40dB (100Hz, 空载, 10cm) | 电机在100Hz空载运行时的噪音水平(相当于图书馆环境) | 声级计距电机10cm测量(A计权) |
为什么关注这些?
- 绝缘电阻/耐压:关乎设备安全性(尤其医疗/工业设备需过认证)。
- 噪声:影响用户体验(如家用设备需≤40dB,否则需加消音措施)。
四、应用场景与选型总结
- 适用场景:
- 低速高扭矩设备(如自动阀门、仪器指针)
- 断电需位置保持的机构(自定位转矩>300gf·cm)
- 噪音敏感环境(<40dB)
- 禁用场景:
- 高速旋转(>20 RPM需谨慎评估)
- 大惯性负载(易失步)
- 持续高温环境(温升易超标)
▶ 疑难点解答(来自工程师高频问题)
Q1:牵入频率(≥500Hz) 和 牵出频率(≥1000Hz) 如何理解?
A:
- 牵入频率:电机冷启动的脉冲上限(例:若设备需每秒走200步,可直接启动)。
- 牵出频率:电机运行中可承受的脉冲上限(例:加速后脉冲可升至800Hz,但不可超1000Hz)。
关键点:脉冲频率需按“步/秒”理解(非完整周期)!
(步/秒:又可以理解为 “拍/秒”,按该规格书标注的“分配顺序”为8步或者8拍为一个完整周期。)
Q2:600VAC,1s,1mA耐压测试有什么实际意义?
A:此参数验证电机在瞬时高压冲击(如雷击、电网浪涌)下的安全性:
- 600VAC:远高于额定电压(12V),模拟极端异常情况。
- 1mA限流:确保击穿时电流极小,不会引发火灾。
应用提示:若设备需通过CE/UL认证,此项为必测项目!
Q3:为什么噪声测试条件强调“空载”和“10cm”?
A:
- 空载:排除负载机械噪音干扰,纯测电机自身振动噪声。
- 10cm:标准测试距离(ISO 3744),反映用户实际听到的音量。
实测案例:若带载后噪声>50dB,需检查轴同心度或减速齿轮间隙。
Q4:为什么规格书只提牵入转矩,不提牵出转矩?
A:这是由28BYJ48的 低成本定位 决定的:
-
牵入转矩 (Pull-in Torque):
- 表示电机在指定频率(100Hz)下 直接启动能带动的最大负载(≥500gf·cm)。
- 对用户更重要:此类电机多用于低速启停场景(如阀门控制),需确保启动不丢步。
-
牵出转矩 (Pull-out Torque):
- 表示运行中不失步的最大负载转矩,通常高于牵入转矩。
- 省略原因:
- 28BYJ48是 减速电机,设计用于低速高扭矩,而非高速运行(牵出频率仅≥1000Hz,性能有限)。
- 厂商可能默认用户不会在高速下带载运行。
📌 术语对照表(避免混淆)
| 术语 | 英文 | 定义 | 28BYJ48规格书 |
|---|---|---|---|
| 牵入转矩 | Pull-in Torque | 电机在特定频率下 直接启动 能承受的最大负载转矩 | ≥500gf·cm (100Hz) |
| 牵出转矩 | Pull-out Torque | 电机在运行中 保持同步 能承受的最大负载转矩(通常高于牵入转矩) | 未标注 |
| 自定位转矩 | Detent Torque | 断电后转子靠磁阻保持位置的阻力矩(防滑) | ≥300gf·cm |
为何会出现术语争议?
- 历史习惯:部分中文资料将“牵出转矩”泛化为“运行转矩”,导致混淆。
- 厂商差异:日系厂商(如日本电产)常用“牵入转矩”,而欧美厂商(如ST)可能同时标注两者。
工程建议:
- 若需高速带载,实测牵出转矩(方法:逐步增加负载直至失步)。
- 保守设计:直接按牵入转矩的70%作为安全值(即≥350gf·cm)。
结语:规格书没写但工程师该知道的
- 脉冲加速曲线:实际使用中需从低频逐步加速至目标频率(避免直接满频启动)。
- 驱动芯片选型:推荐ULN2003(低成本方案)或专用步进驱动器(支持细分)。
记住:参数是死的,应用是活的。理解每个数字背后的工程意义,才能让电机乖乖听话!
遇到规格书未明确参数时,优先联系厂商确认。
“本文术语依据IEC 60034-1标准,与部分厂商表述可能存在差异”。
版权声明:本文基于“无锡市德丰电机有限公司”28BYJ48规格书解析,转载请注明来源。