基于蚁群算法的三维路径规划原理与实现
目录
编辑
一、三维路径规划问题概述
二、蚁群算法基本原理
三、算法数学模型
3.1 转移概率公式
3.2 信息素更新规则
3.3 参数设置参考
四、MATLAB实现代码
五、算法优化方向
六、应用实例分析
七、总结
一、三维路径规划问题概述
三维路径规划是指在三维空间中找到从起点到终点的最优路径,同时避开障碍物并满足特定约束条件。这类问题在无人机导航、机器人运动规划等领域有广泛应用。与传统二维路径规划相比,三维路径规划需要考虑额外的垂直维度约束,增加了问题的复杂度。
二、蚁群算法基本原理
蚁群算法(ACO)是一种模拟蚂蚁觅食行为的群体智能优化算法,其核心思想是通过信息素的正反馈机制寻找最优路径。在三维路径规划中,算法需要做如下扩展:
- 三维空间建模:将空间离散化为三维网格,每个网格点代表一个可能的位置节点
- 信息素矩阵:使用三维矩阵记录信息素浓度
- 启发函数设计:考虑三维空间中的距离和障碍物因素
三、算法数学模型
3.1 转移概率公式
蚂蚁k从节点i转移到节点j的概率为:
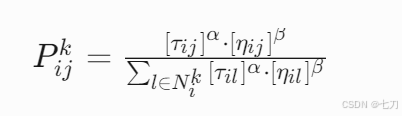
其中:
τ_{ij}:节点i到j的信息素浓度η_{ij}:启发函数,通常取1/d_{ij}(d为节点间距离)α:信息素重要程度因子β