YOLO系列各版本的优缺点分析
以下是YOLO系列各版本的优缺点分析,帮助你根据具体需求选择合适的模型:
YOLOv1
- 优点
- 开创性设计:首次将目标检测统一为一个回归问题,实现了真正的端到端训练和检测。
- 速度快:相比传统的基于区域建议的方法(如R-CNN系列),检测速度有显著提升。
- 缺点
- 定位精度低:对小目标和密集目标的检测效果较差,边界框预测不够准确。
- 召回率低:每个网格只能预测固定数量的边界框,限制了对多个目标的检测能力。
- 训练不稳定:损失函数设计不够完善,训练过程容易出现不稳定。
YOLOv2(YOLO9000)
- 优点
- 精度提升:引入了Batch Normalization、高分辨率分类器等技术,提高了检测精度。
- 多尺度训练:支持多尺度输入,使模型能够在不同分辨率下运行,平衡速度和精度。
- 扩展能力:提出了YOLO9000,可以同时检测9000多个类别,展示了强大的扩展性。
- 缺点
- 仍然存在定位误差:虽然比v1有所改进,但边界框定位精度仍然不如基于锚框的方法。
- 小目标检测不足:对小目标的检测能力有限,没有专门针对小目标优化。
YOLOv3
- 优点
- 多尺度检测:采用特征金字塔网络(FPN),在多个尺度上进行检测,显著提高了小目标的检测能力。
- 更好的骨干网络:使用Darknet-53作为骨干网络,提供了更强的特征提取能力。
- 分类改进:使用逻辑回归替代softmax进行分类,支持多标签分类。
- 缺点
- 计算资源需求高:相比v2,模型复杂度增加,对计算资源的要求更高。
- 小目标检测仍有提升空间:虽然比v2有所改进,但对极小目标的检测效果仍然不够理想。
YOLOv4
- 优点
- 高性能:结合了大量先进技术(如CSPNet、PANet、Mish激活函数等),在速度和精度上取得了很好的平衡。
- 训练技巧丰富:引入了多种数据增强方法(如Mosaic、CutMix)和正则化技术,提高了模型的泛化能力。
- 易于部署:在保持高精度的同时,仍然能够在GPU上实现实时检测。
- 缺点
- 模型复杂度高:虽然性能优秀,但模型相对复杂,对硬件要求较高。
- 代码实现复杂:融合了大量技术,代码实现和调参相对复杂。
YOLOv5
- 优点
- PyTorch实现:基于PyTorch框架,代码结构简洁,易于使用和修改。
- 模型系列丰富:提供了从nano到xlarge的多个模型版本,方便根据需求选择。
- 部署友好:支持多种导出格式(ONNX、TensorRT等),便于在不同平台上部署。
- 训练速度快:优化了训练流程,训练速度比YOLOv4更快。
- 缺点
- 官方支持有限:作为Ultralytics的开源项目,官方文档和支持相对有限。
- 性能依赖预训练:模型性能在很大程度上依赖于预训练权重,自定义数据集上的表现可能不如预期。
YOLOv7
- 优点
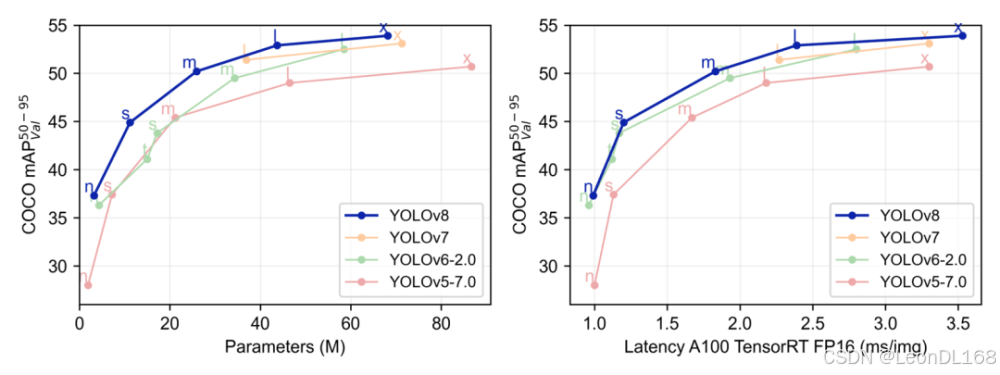
- 高性能:在相同的计算资源下,性能优于YOLOv5和YOLOv8。
- 模型重参数化:引入了ELAN架构和模型重参数化技术,提高了模型的表达能力。
- 多任务支持:支持目标检测、实例分割和姿态估计等多任务。
- 缺点
- 代码维护问题:与YOLOv5和YOLOv8相比,社区支持和代码维护可能不够活跃。
- 部署难度:由于模型结构复杂,部署到边缘设备可能需要更多优化。
YOLOv8
- 优点
- 一体化架构:统一了目标检测、实例分割、图像分类和姿态估计等任务,使用同一套API。
- 高性能:在速度和精度上都有很好的表现,优于YOLOv5。
- 易用性:提供了简洁的API和丰富的文档,易于上手和使用。
- 部署友好:支持多种导出格式,方便在不同平台上部署。
- 缺点
- 新模型风险:作为较新的模型,可能存在一些未被发现的问题和局限性。
- 商业限制:部分高级功能可能受到商业许可的限制。
选择建议
- 追求极致速度:YOLOv5n或YOLOv8n,这些轻量级模型在移动设备上也能实现实时检测。
- 平衡速度和精度:YOLOv5s/YOLOv8s或YOLOv7-tiny,适合大多数实际应用场景。
- 高精度需求:YOLOv4、YOLOv5l/YOLOv8l或YOLOv7,适合GPU资源充足的场景。
- 多任务需求:YOLOv8,支持检测、分割、分类和姿态估计等多种任务。
- 部署便捷性:YOLOv5和YOLOv8,提供了更友好的部署工具和文档。
根据具体应用场景和硬件条件,选择合适的YOLO版本可以在速度和精度之间取得最佳平衡。