Mujoco 学习系列(四)官方模型仓库 mujoco_menagerie
mujoco 官方在 Github 上发布了一个他们自己整理的高质量的模型仓库,这个仓库是一个持续维护的项目,里面包含了目前市面上常见的人形机器人、机械臂、底盘等模型,对于初学者而言是一个非常好的学习资料,无论是想在仿真环境中尝试还是想学习怎样编写 xml 文件,这个仓库都是十分难得的资源。
- MuJoCo Menagerie 官方 Github 仓库:Menagerie
这个文档将简单演示下如何在仿真环境中使用这些资源,如果你已经阅读过之前的三篇博客,那么这部分内容对你而言将不是问题。
- Mujoco 学习系列(一)安装与部署
- Mujoco 学习系列(二)基础功能与xml使用
- Mujoco 学习系列(三)机器人状态IO与仿真操作

1. 拉取仓库
使用下面的命令拉取仓库:
(mujoco) $ git clone git@github.com:google-deepmind/mujoco_menagerie.git
这个仓库中每一个文件夹都是一个模型,后面将会挑选几个有特点的进行演示。
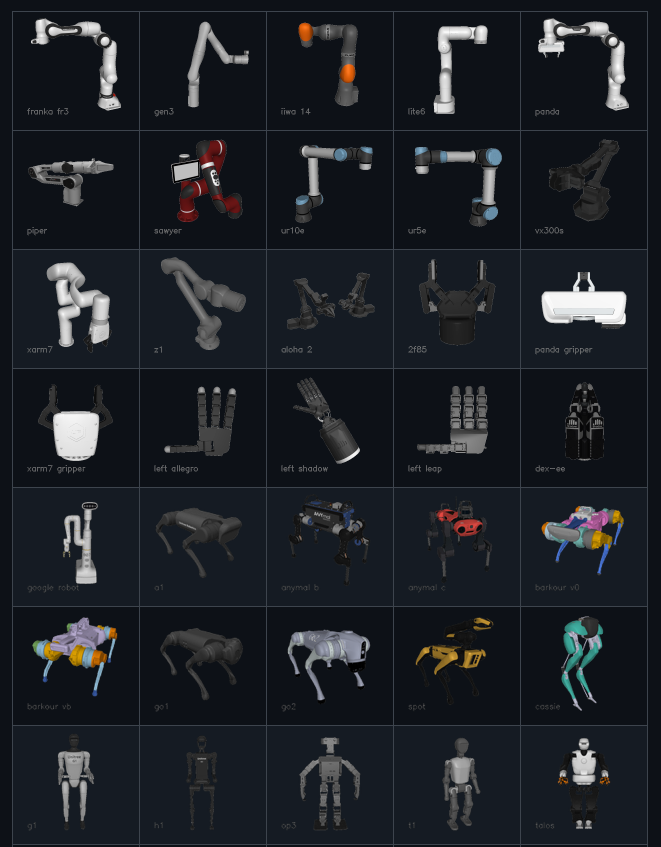
整个仓库大小约为 1.8 GB 如果在这里没有找到你想要的模型文件可以等上一阵子或者在 Issues 中给他们留言并附上对方的文件。因为 mojoco 需要 xml 格式的文件,通常情况下直接拿来是用不了的,需要像之前第一篇笔记中的那样对其进行一次转换。
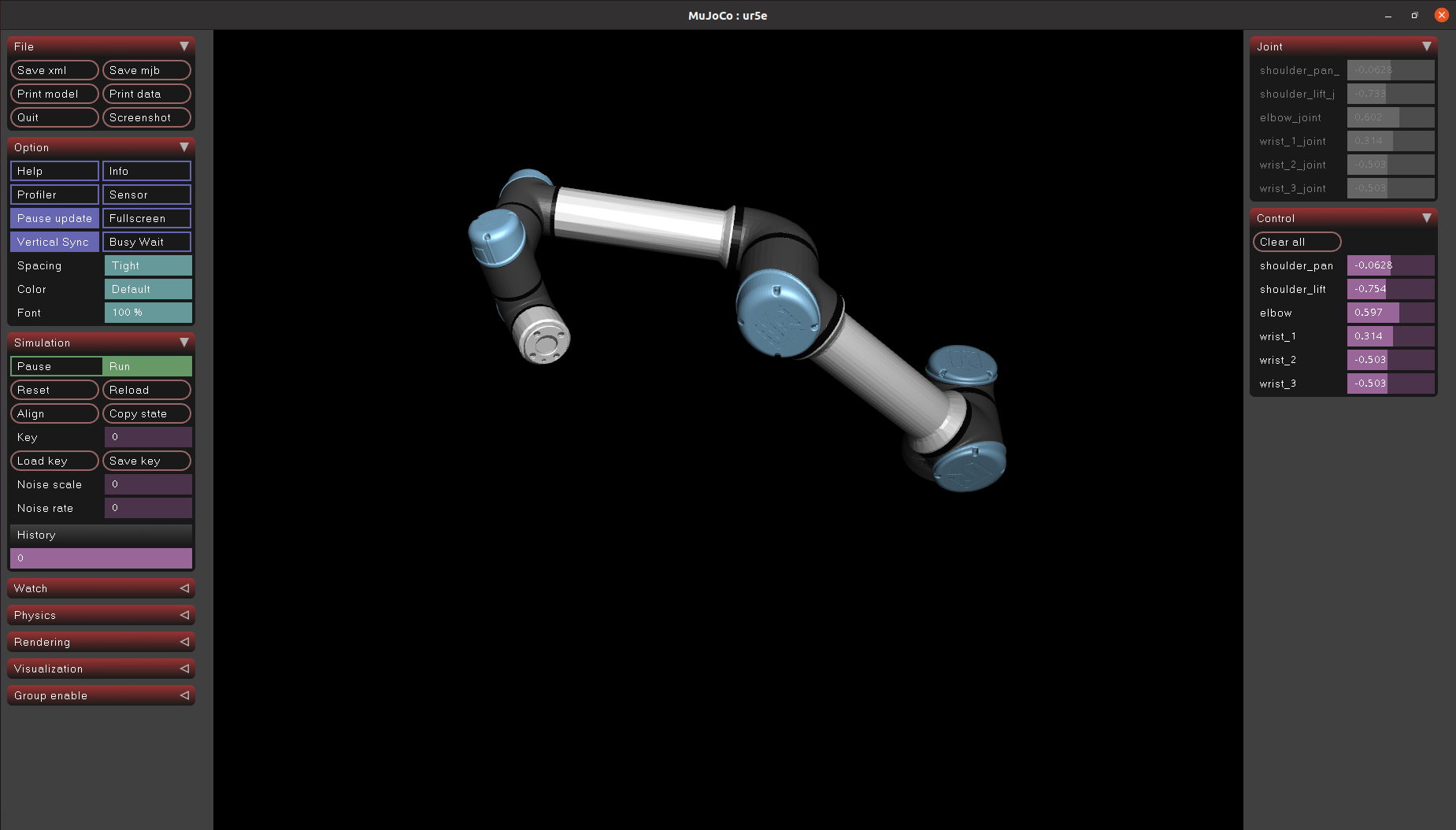
2. ur5 机械臂
(mujoco) $ python -m mujoco.viewer --mjcf=./universal_robots_ur5e/ur5e.xml
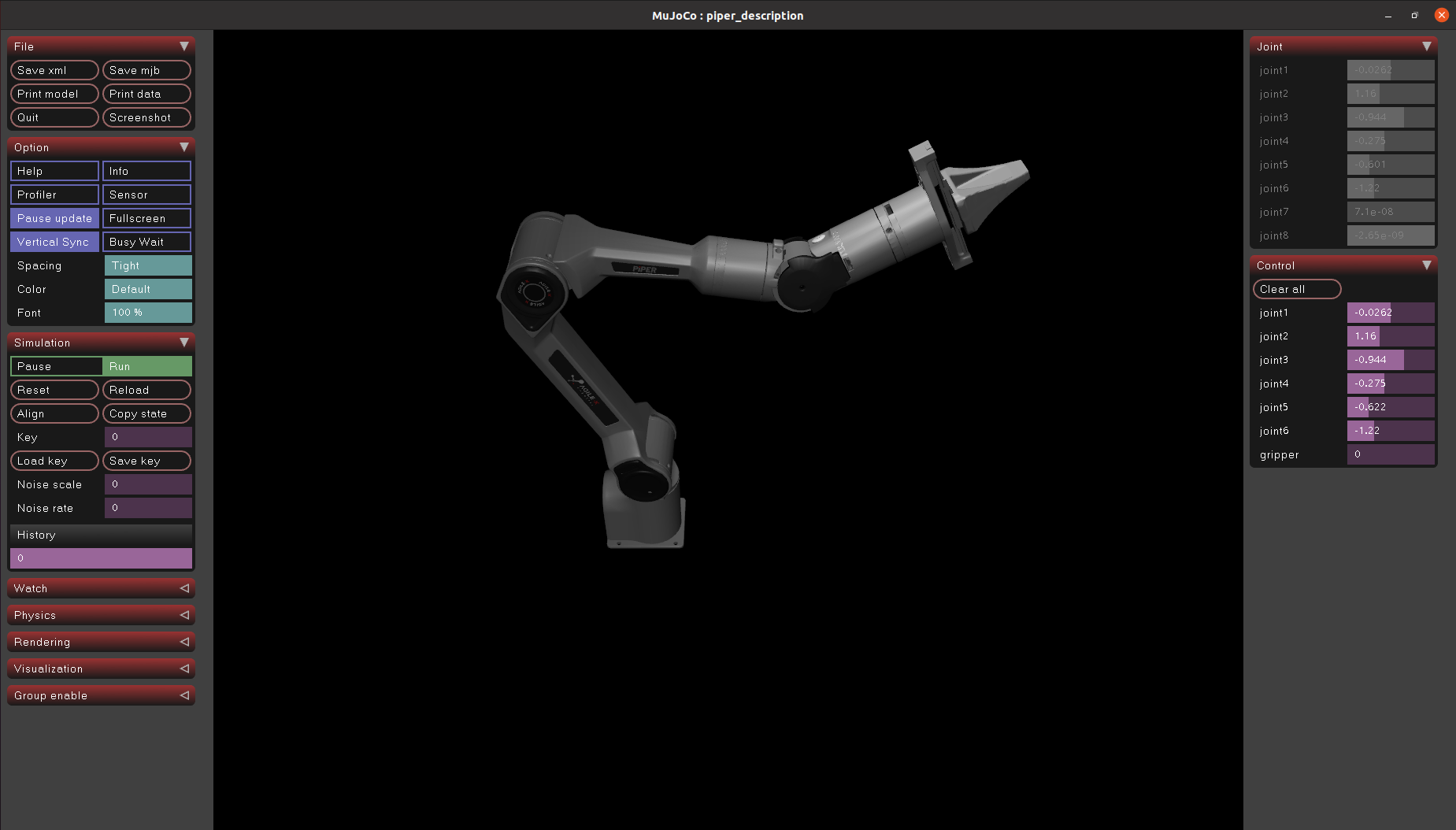
3. agilex piper 机械臂
(mujoco) $ python -m mujoco.viewer --mjcf=./agilex_piper/piper.xml
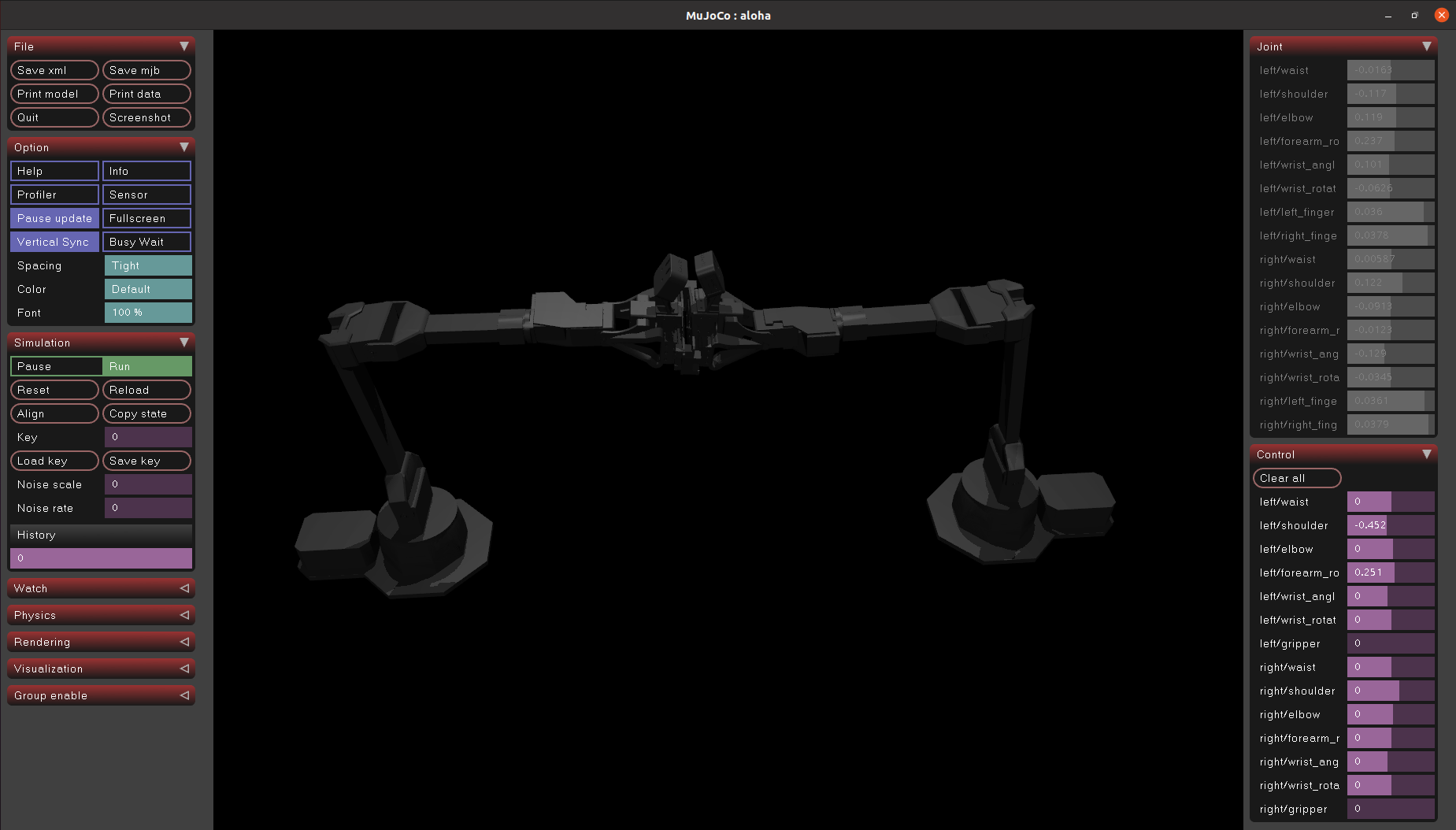
4. aloha 人形机器人
(mujoco) $ python -m mujoco.viewer --mjcf=./aloha/aloha.xml
5. unitree g1 人形机器人
【Note】因为这个xml文件并没有设置关节的活动范围,所以直接运行后会出现机器人下坠的情况,建议在你想打开的 xml 文件中的 <worldbody> 标签中添加以下字段用来创建一个地面:
<geom name="ground" type="box" size="2 2 0.1" pos="0 0 0" />
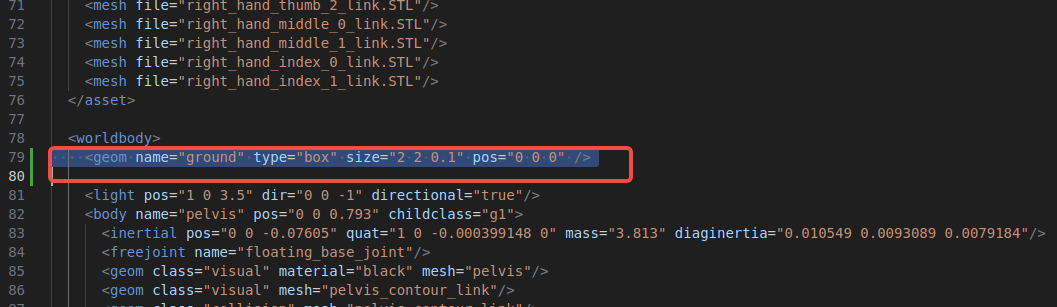
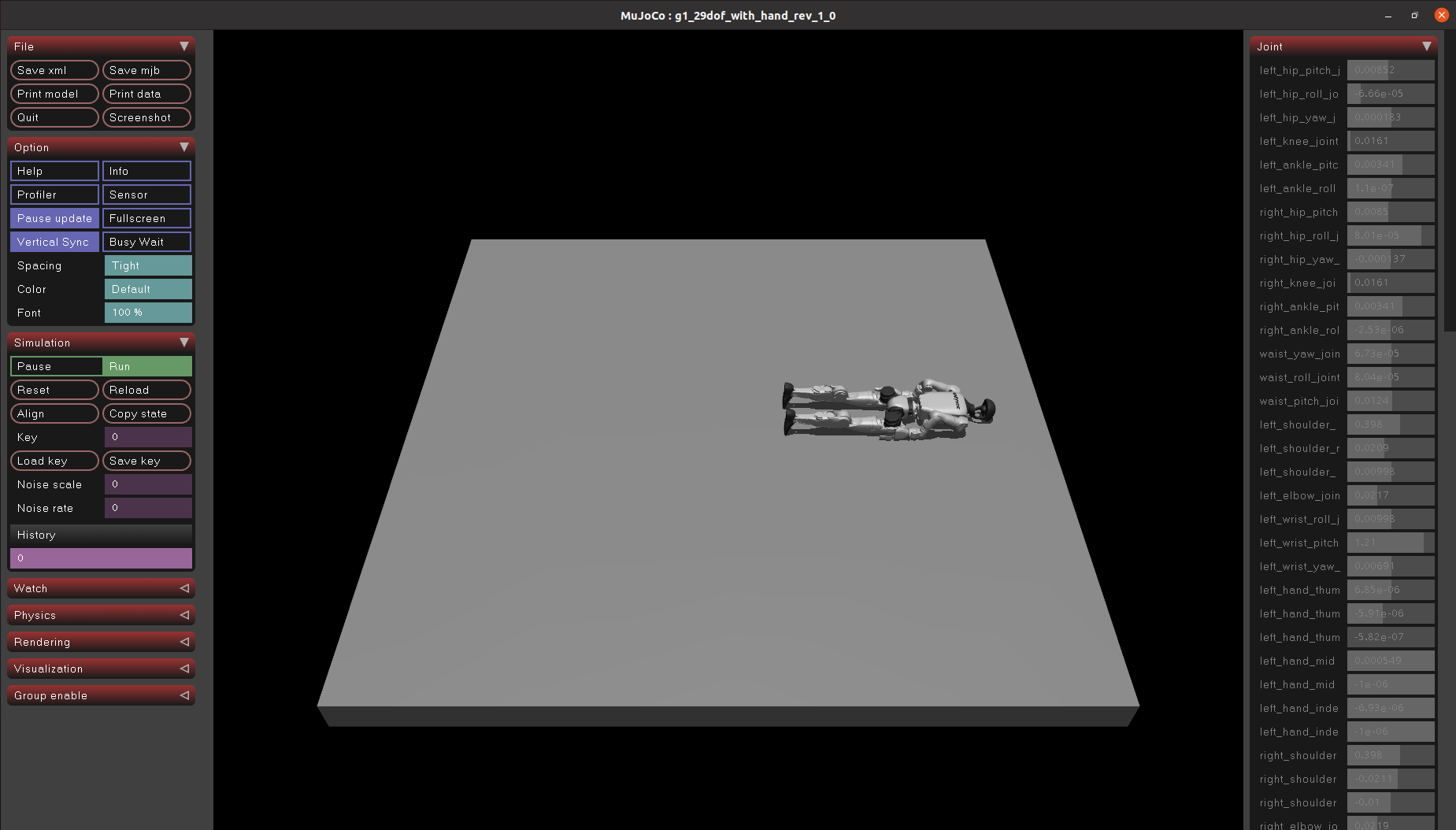
然后再运行就可以看见机器人倒在地面上了:
(mujoco) $ python -m mujoco.viewer --mjcf=./unitree_g1/g1_with_hands.xml
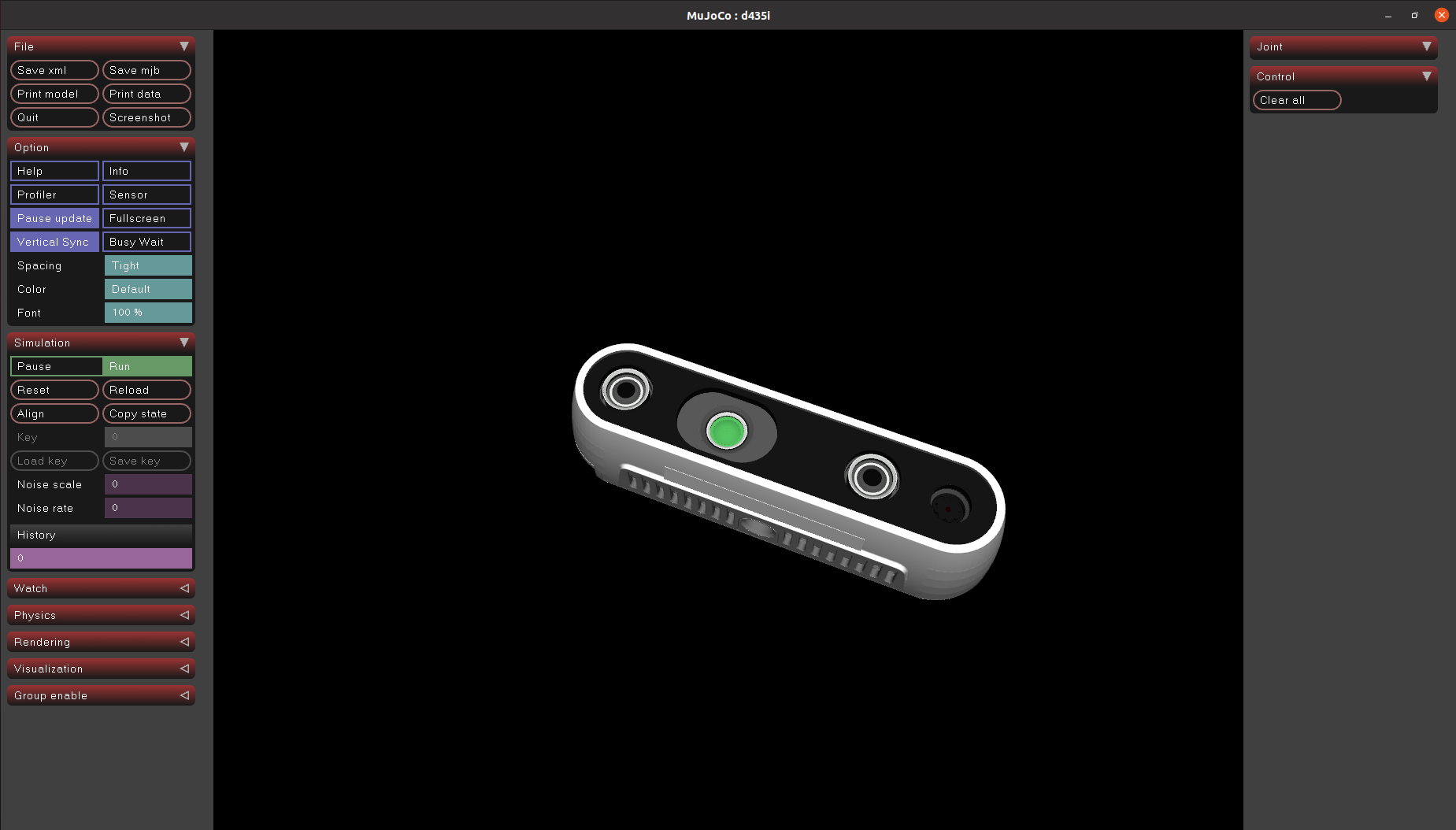
6. RealSense D435i RGBD相机
(mujoco) $ python -m mujoco.viewer --mjcf=./realsense_d435i/d435i.xml
除了上面那些案例,你还可以自己去看看其他的例程,重点不在于里面有没有你想要的,而在于学习 mujoco 如何改写 xml 文件以及自己尝试去魔改,就像第6章节那样的给 xml 添加一个地面避免机器人无限下坠。