无人机避障——深蓝学院浙大Fast-planner学习部分(轨迹生成B-Spline部分)
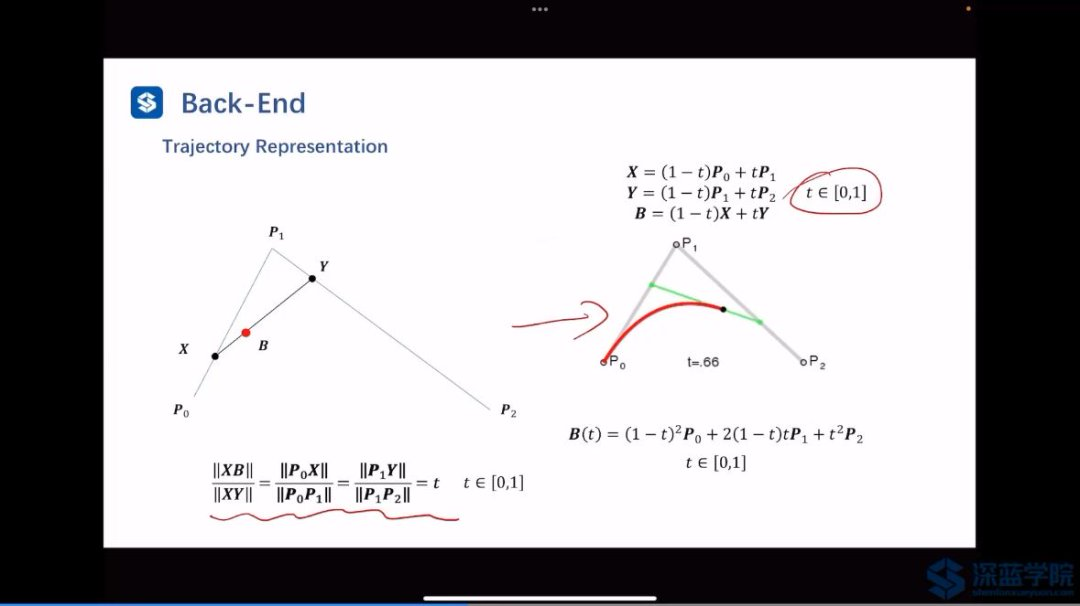
轨迹的表示:
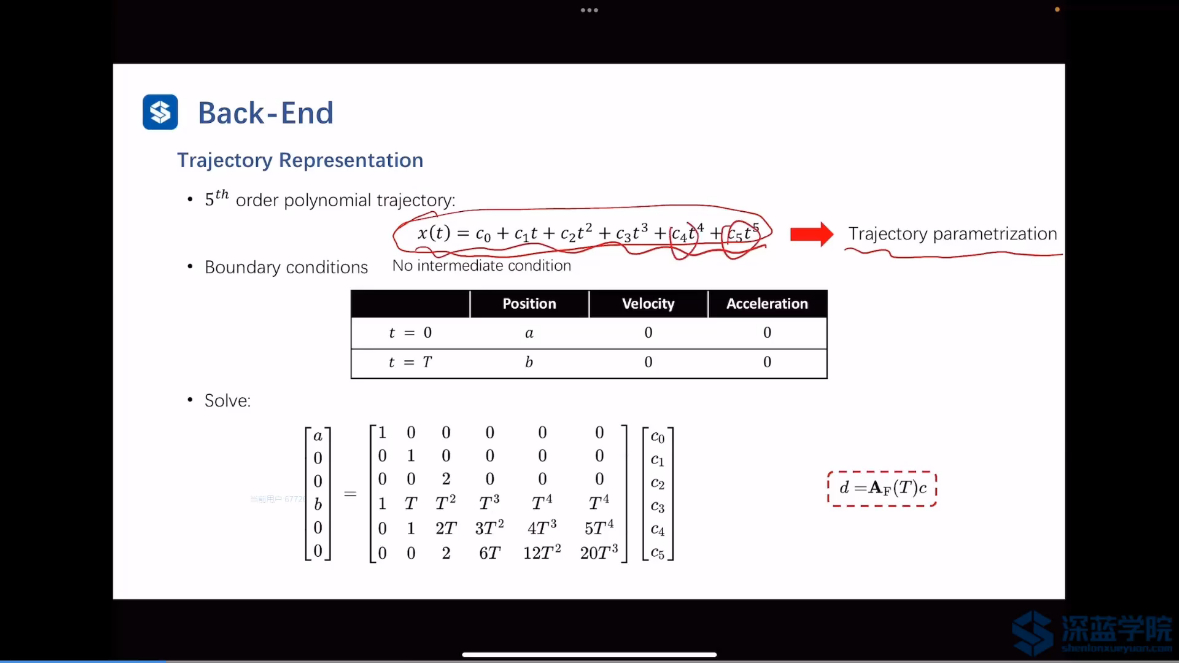
轨迹优化:

其中的点被称为控制点。
三个控制点轨迹表示:
多个控制点轨迹表示:
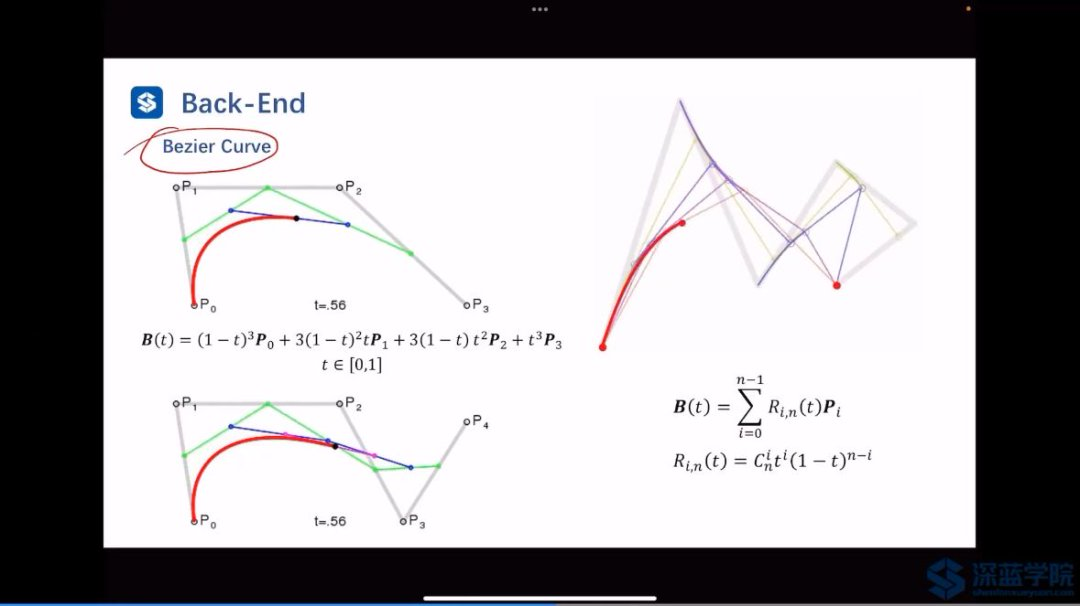
Bezier Curve:
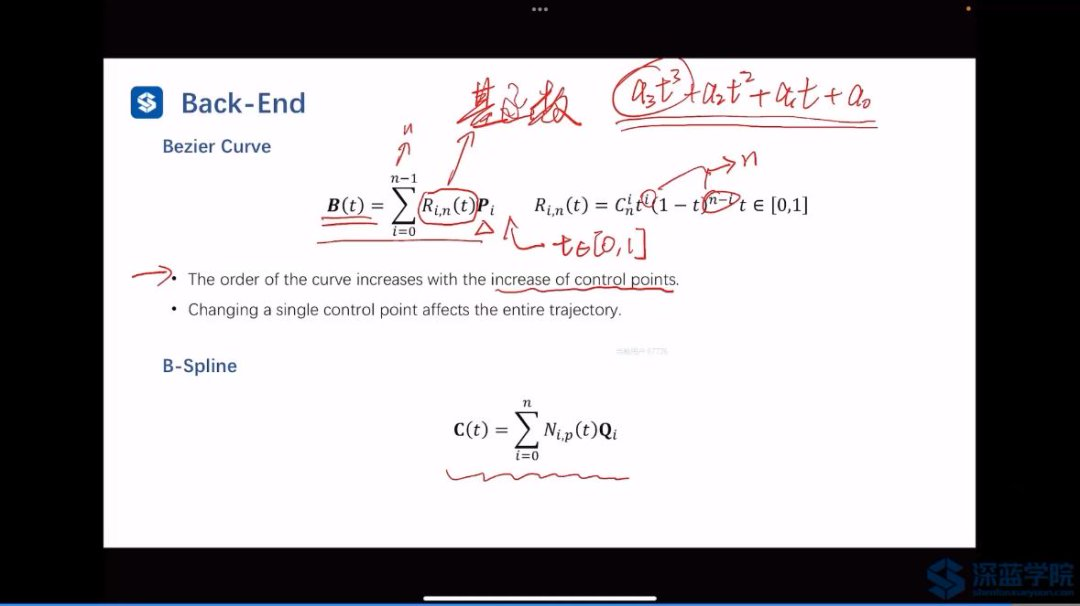
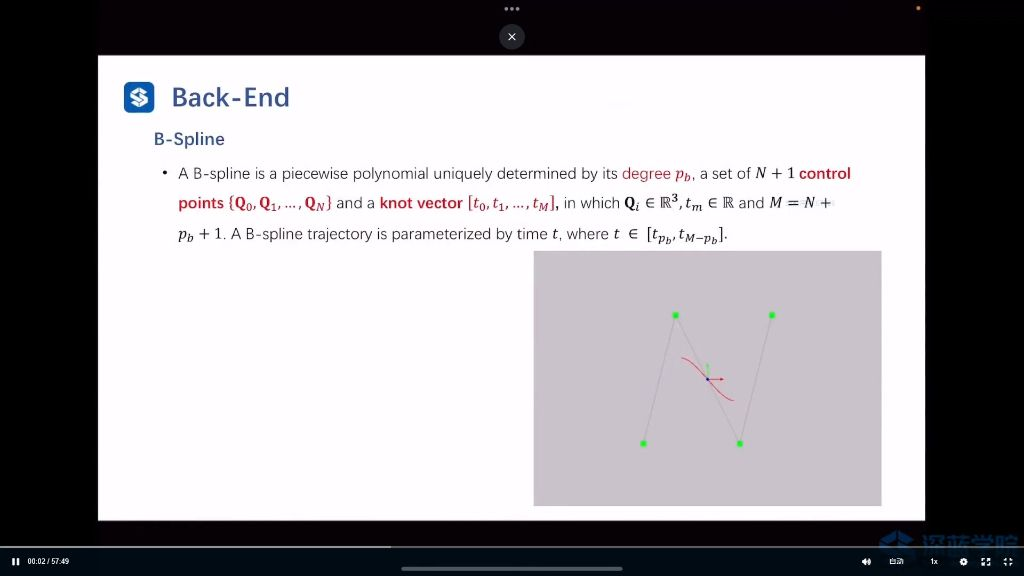
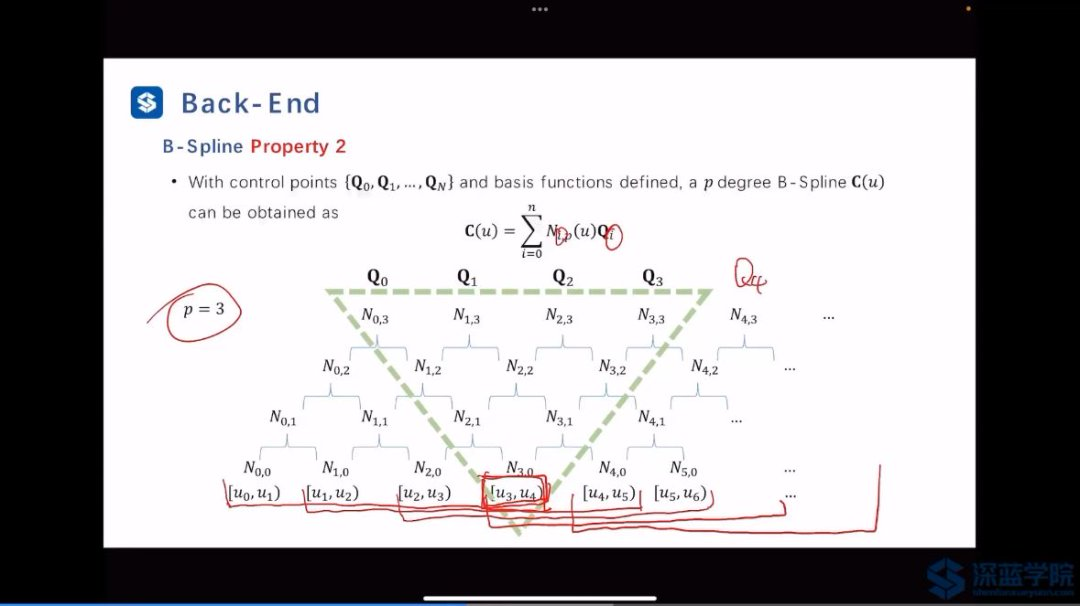
B-Spline曲线定义:
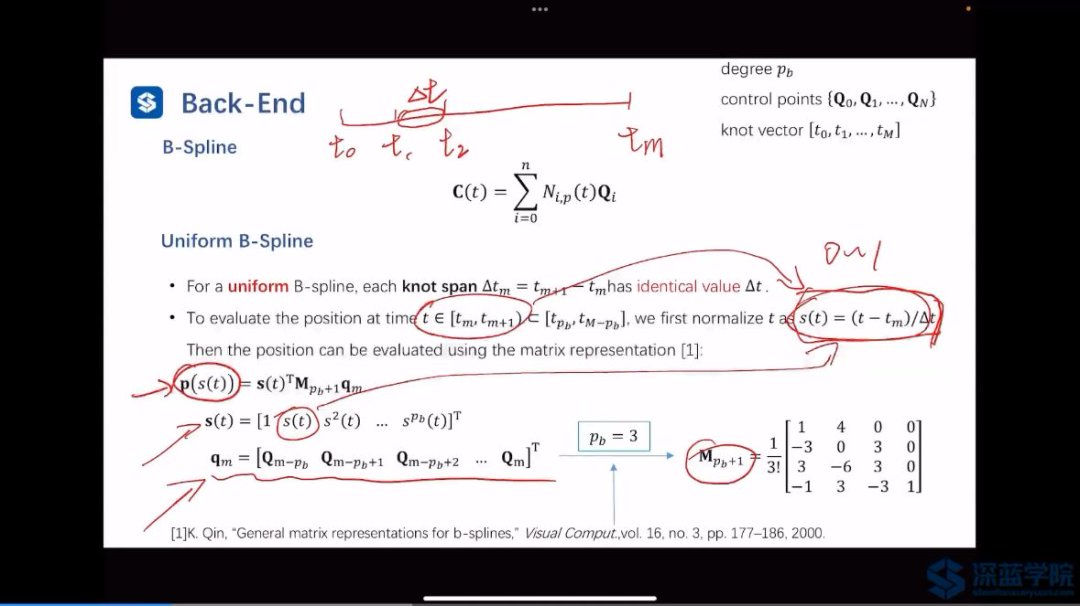
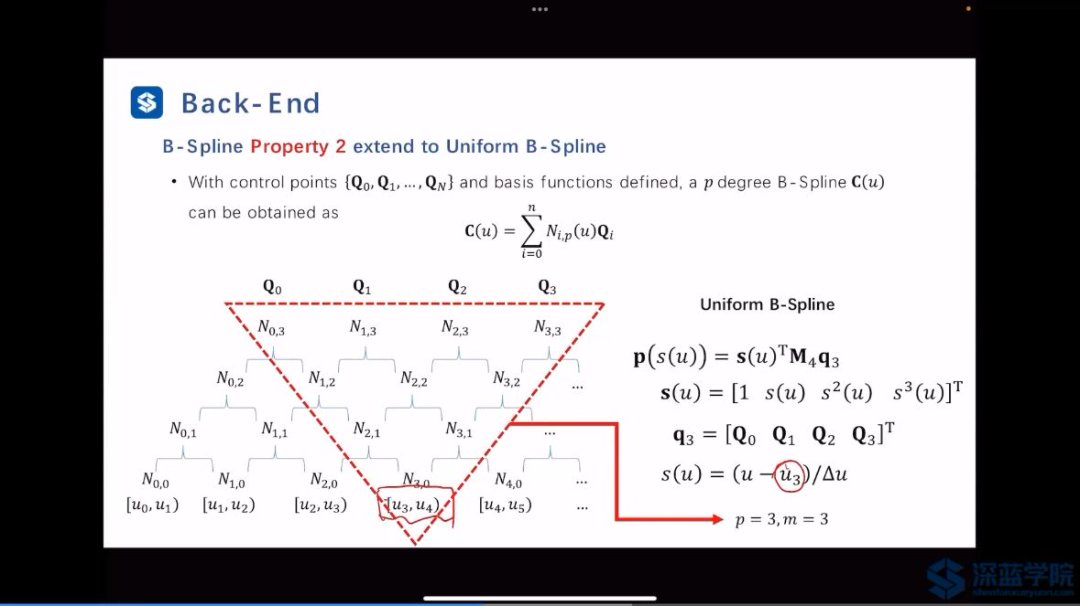
均匀B-Spline:
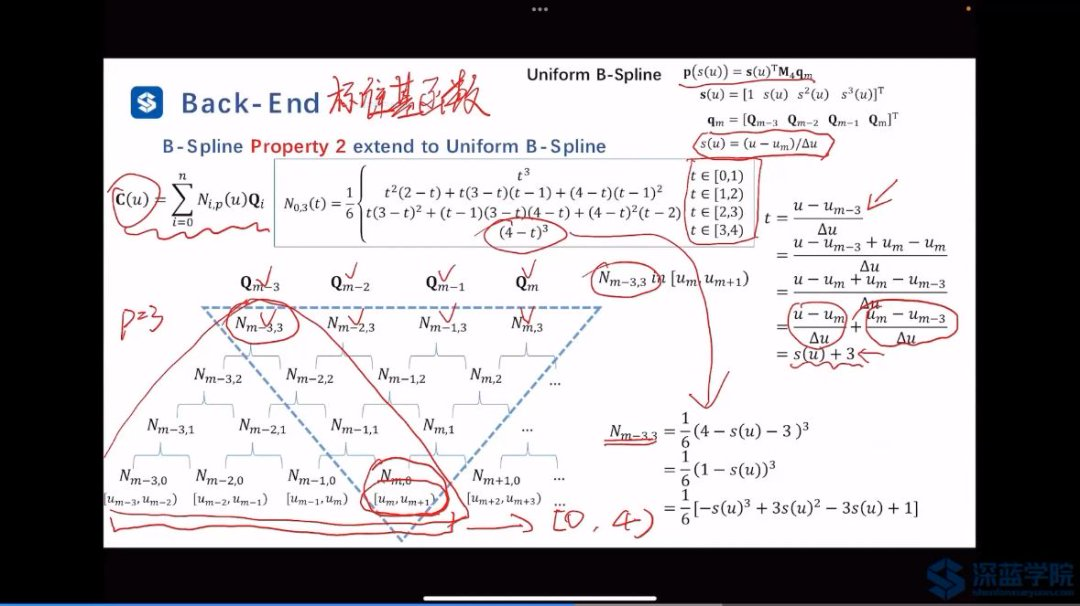
标准基函数:
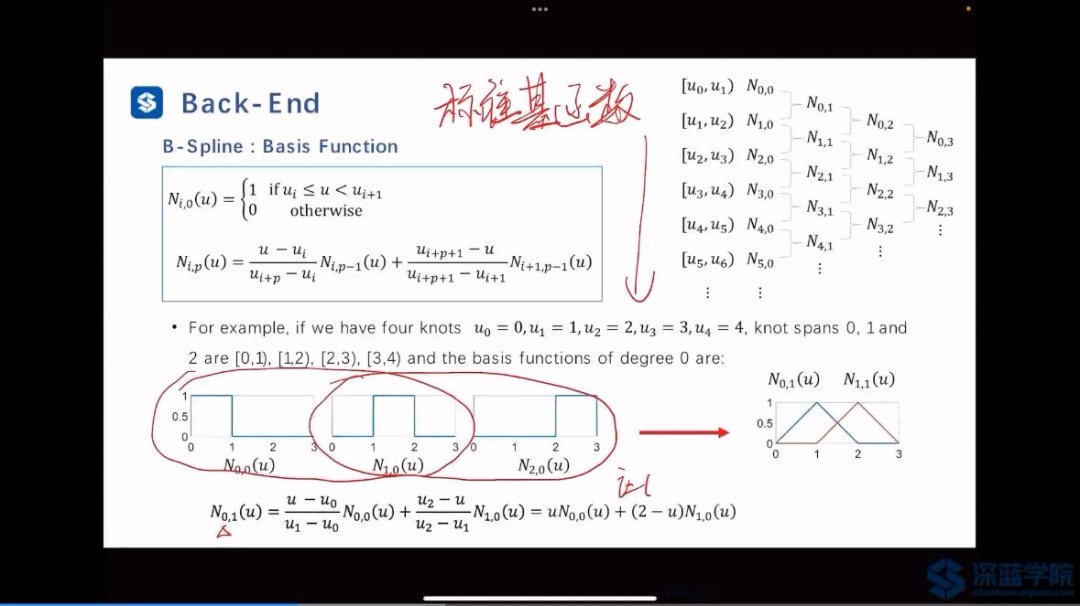
从0阶到1阶进行计算,0阶是给定的,1阶是通过0阶进行计算得到的,此时的u类似于时间t
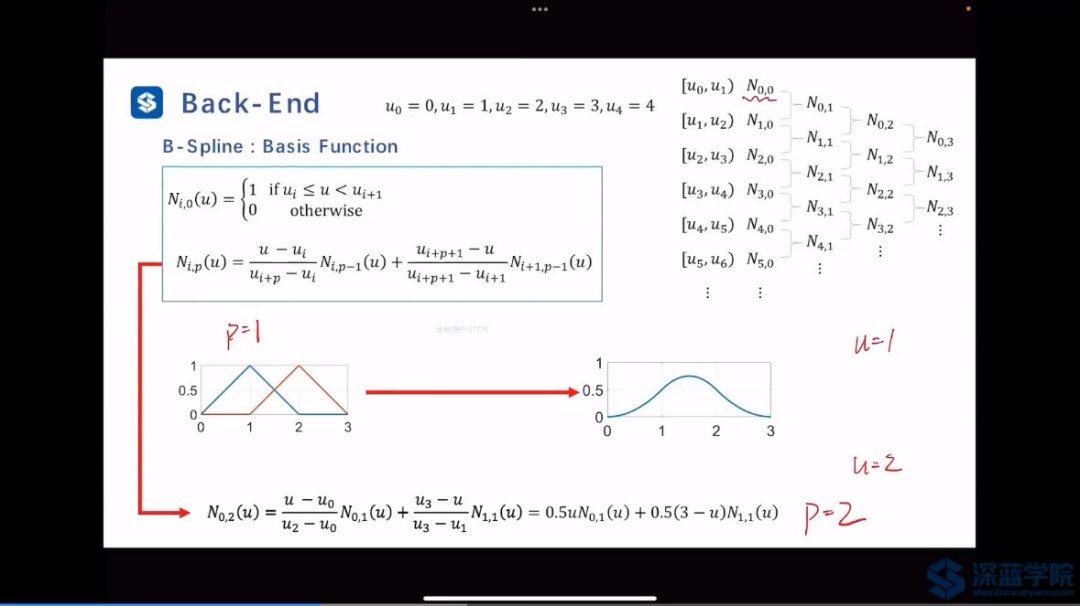
从1阶到2阶进行计算,2阶是通过1阶计算得到的。非0区域一直在增大。
标准基函数推导到阶数为3: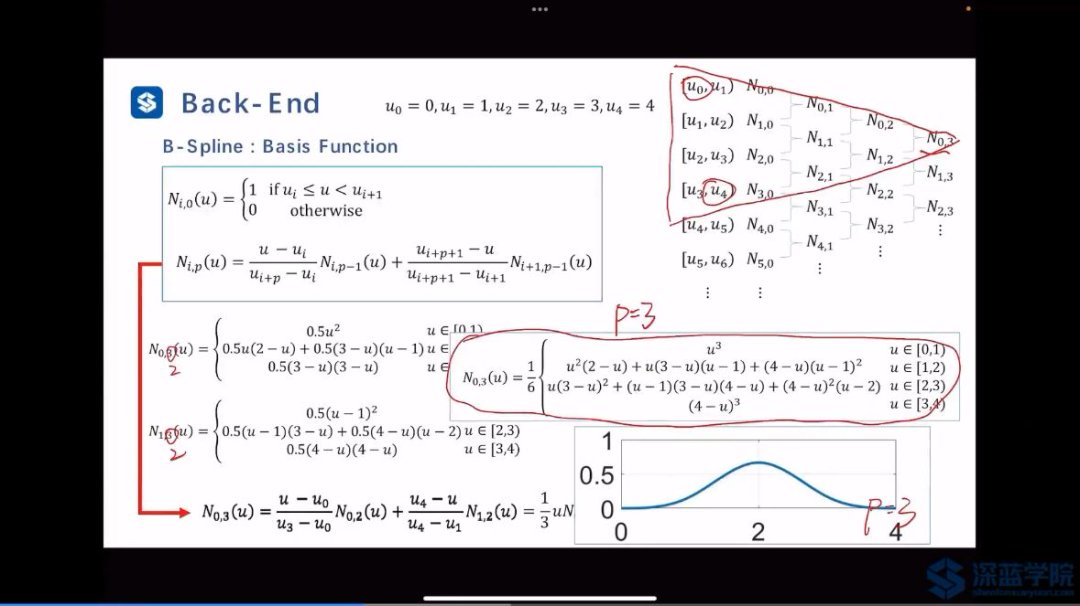
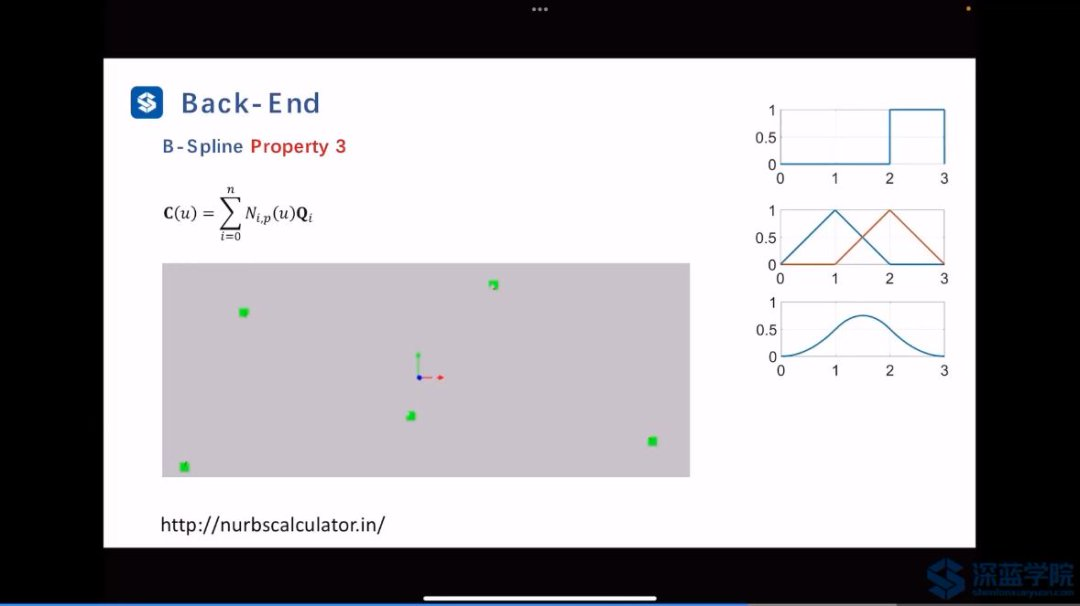
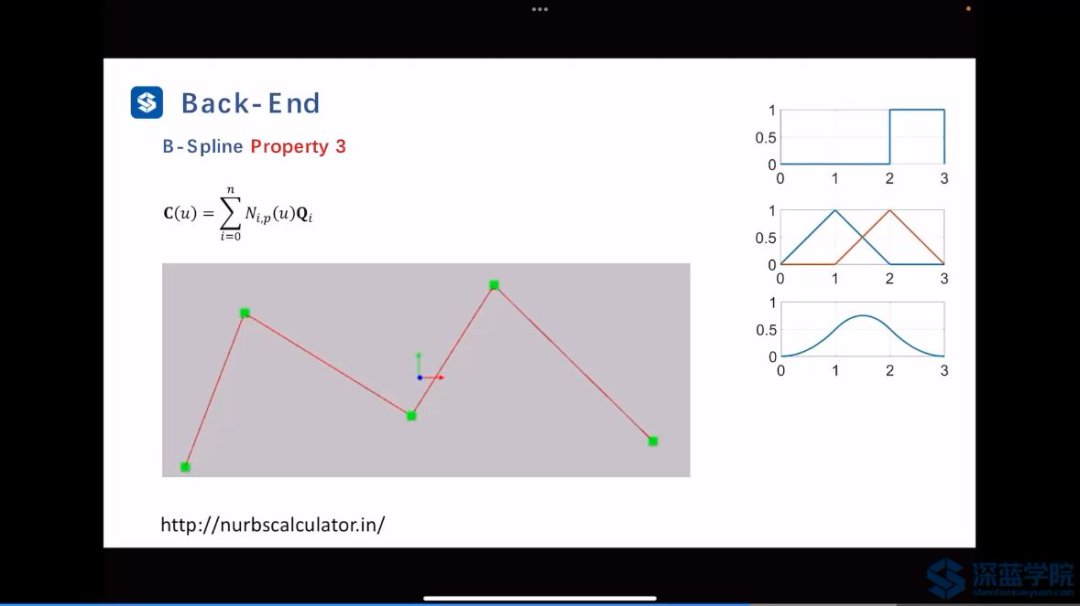
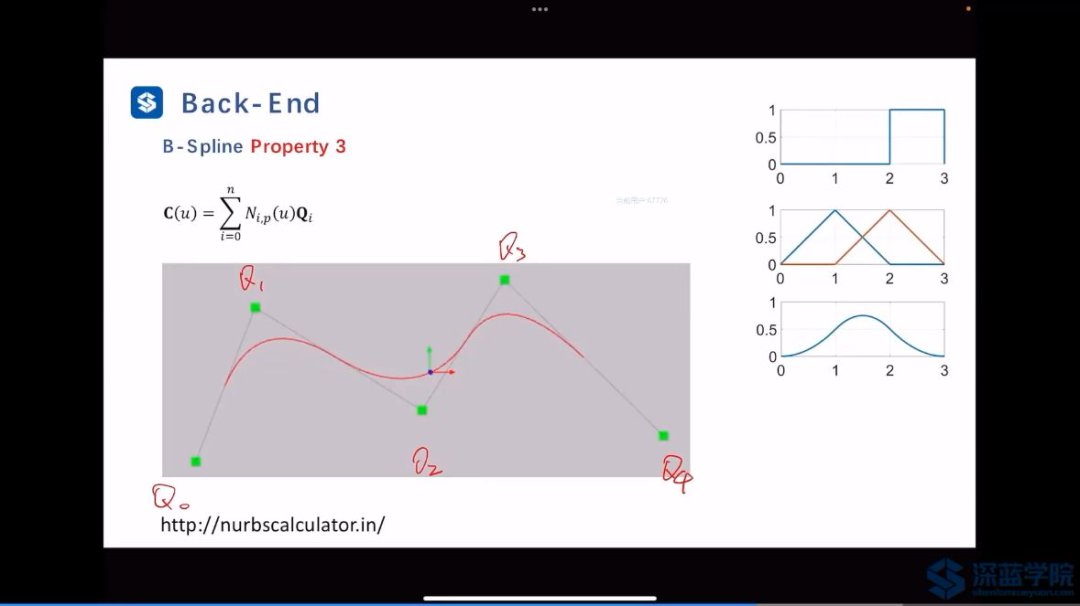
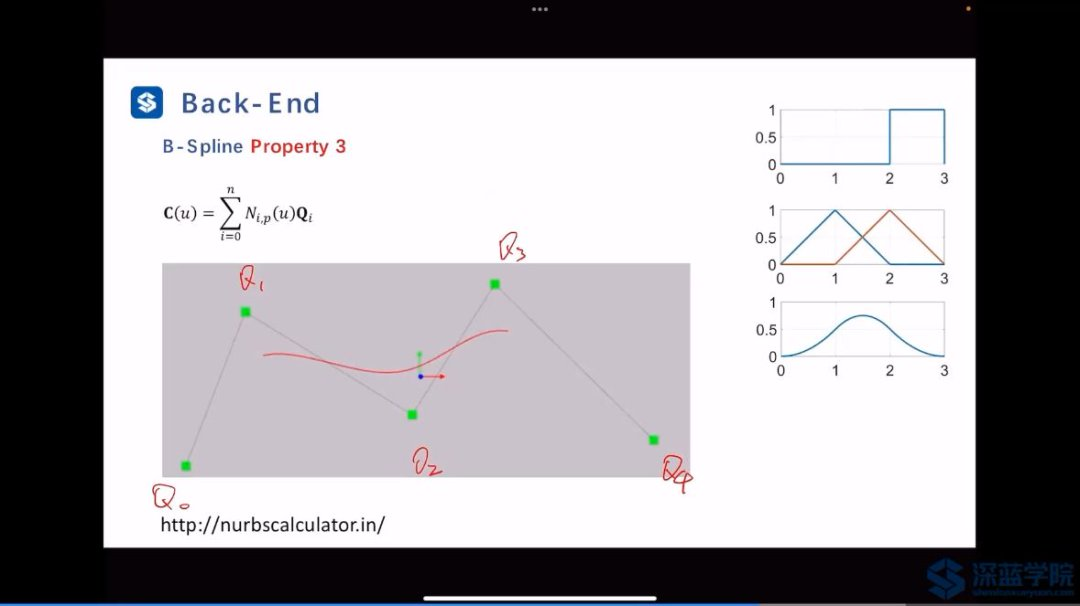
B-Spline中移动控制点,等于整个等式在向量上的相加:
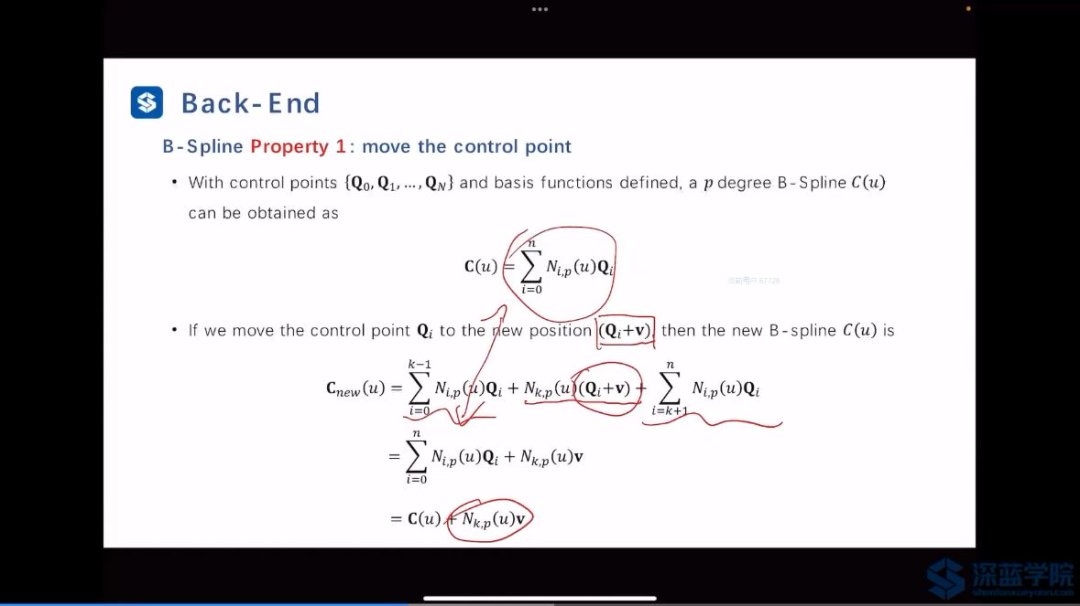
对一个控制点进行移动,它所能改变的范围较小,可以控制。
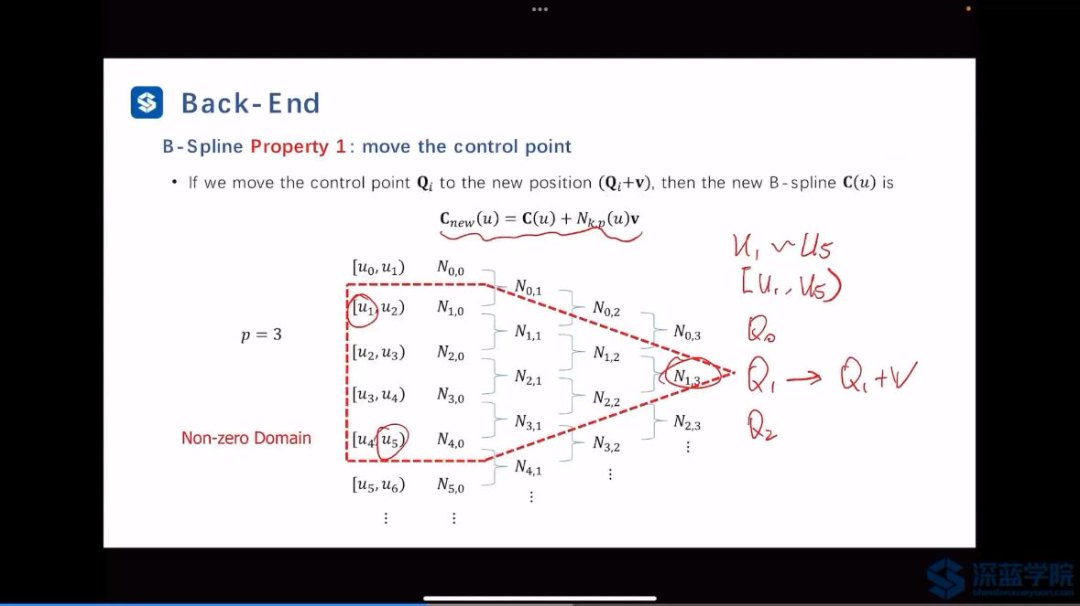
好处:不会改变太大范围里的曲线。
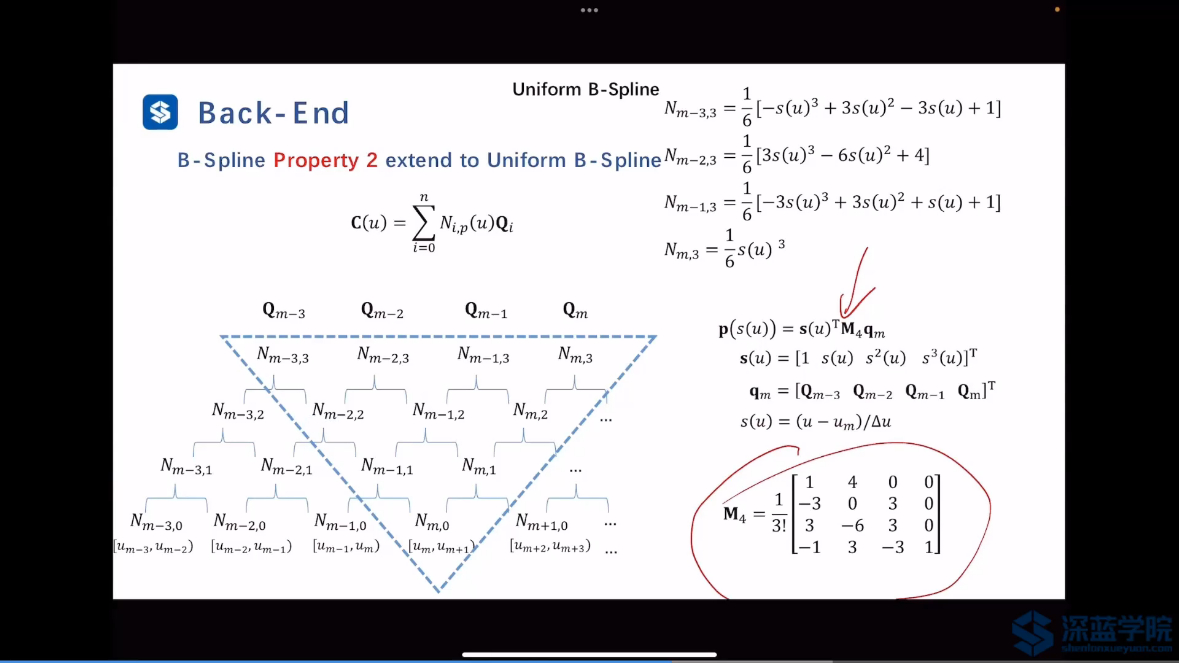
3阶的推导Nm-3,3:
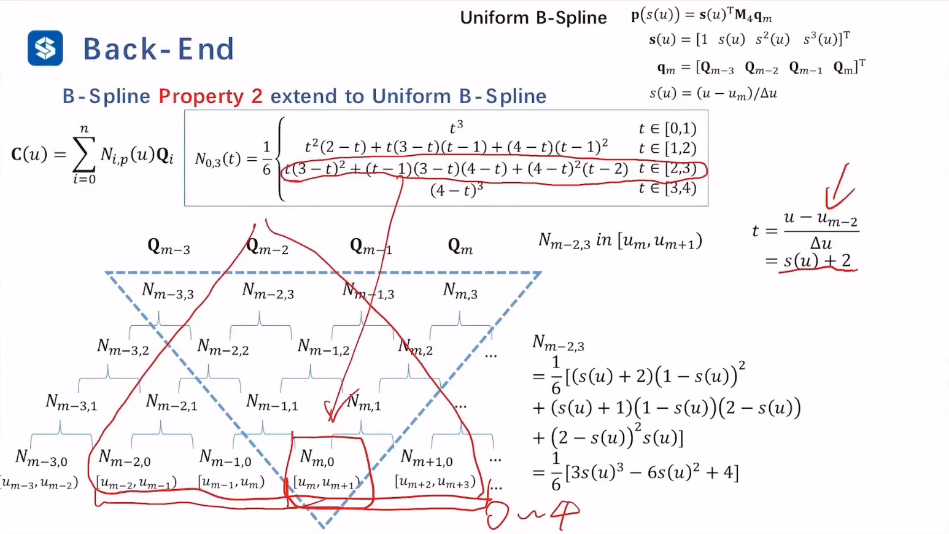
Nm-2,3:
Nm-1,3:
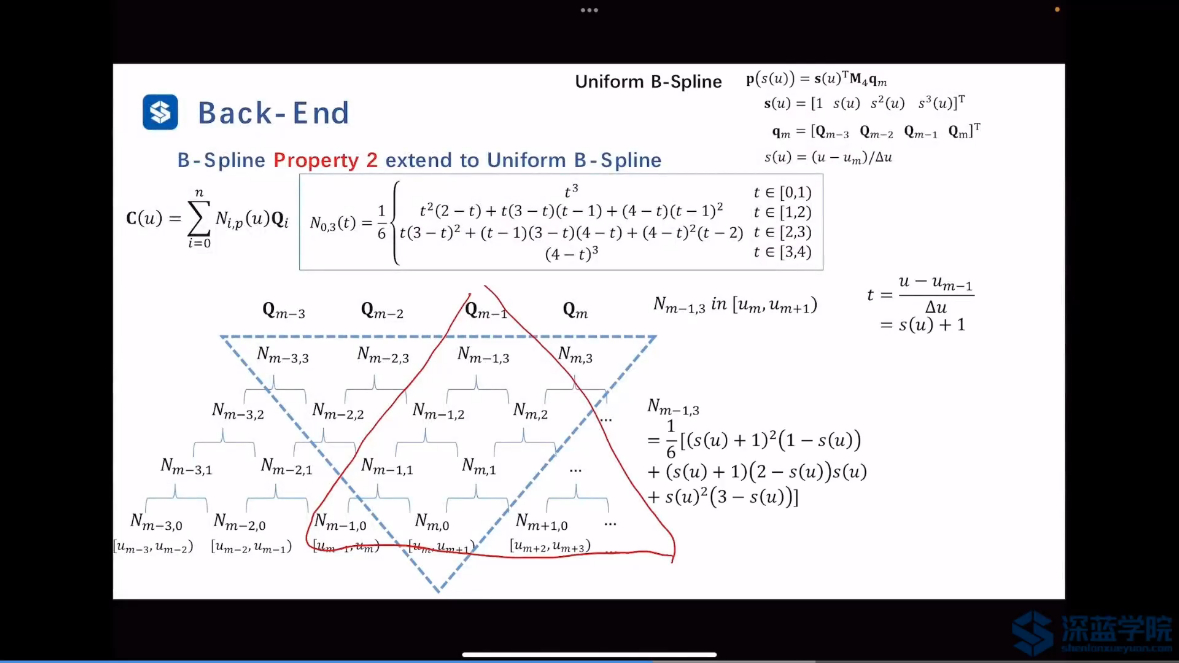
Nm,3以及整个轨迹的表示方式:
B-Spline的轨迹控制点2阶以上连续:
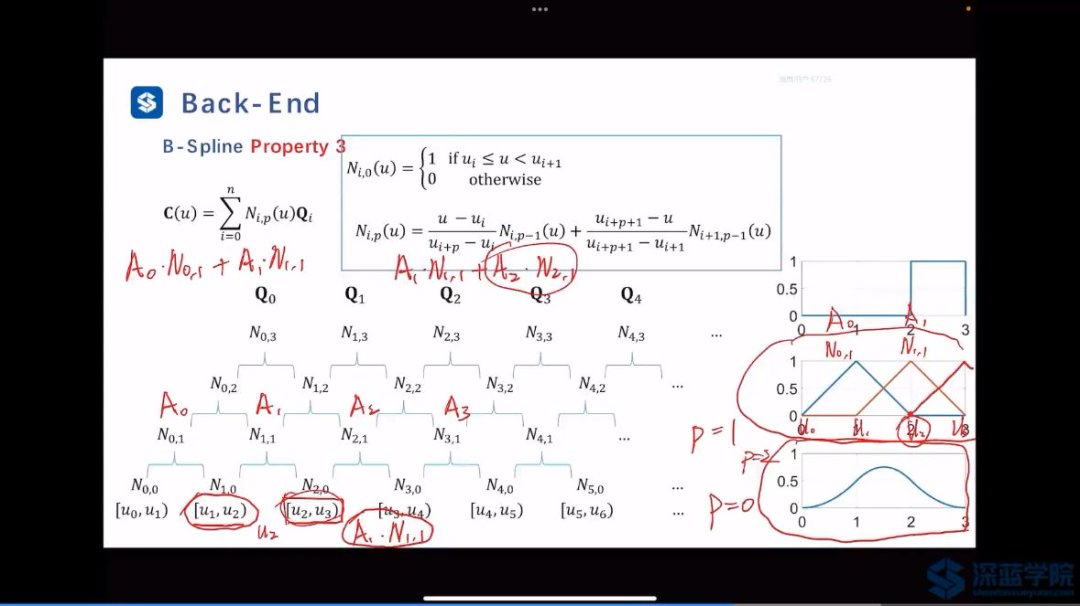
p为0阶:
p为1阶:
p为2阶:
p为3阶(fast和ego常用的轨迹生成):
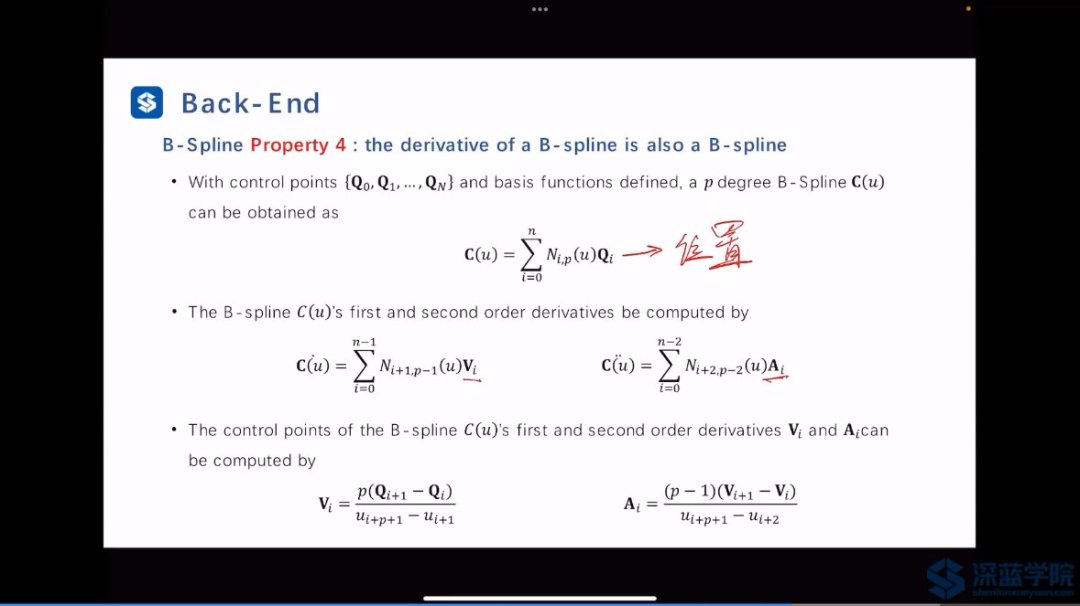
B-Spline的导数还是B-Spline:
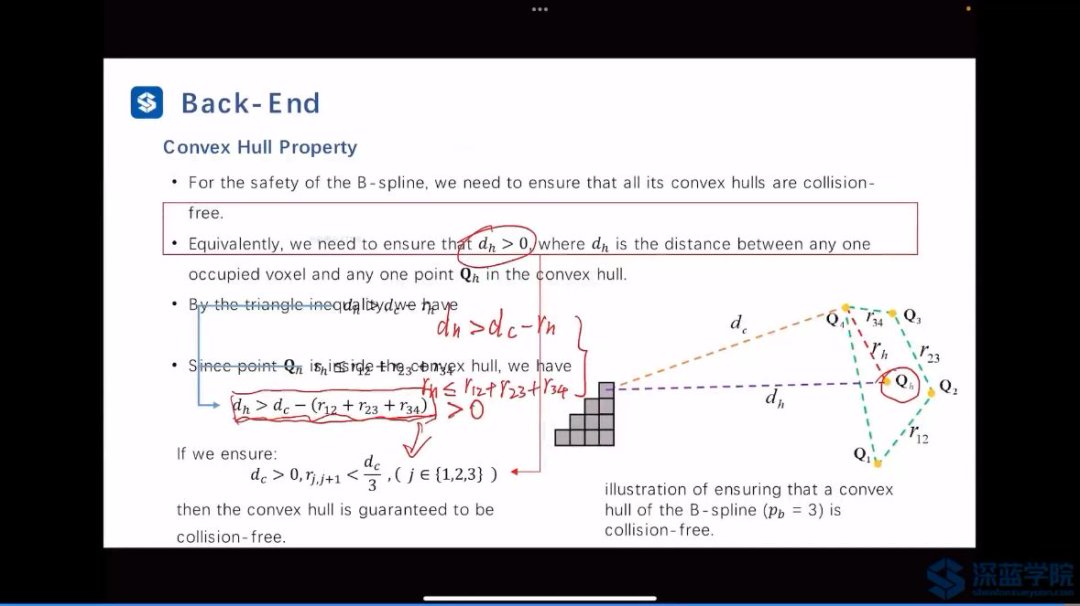
凸包性质:
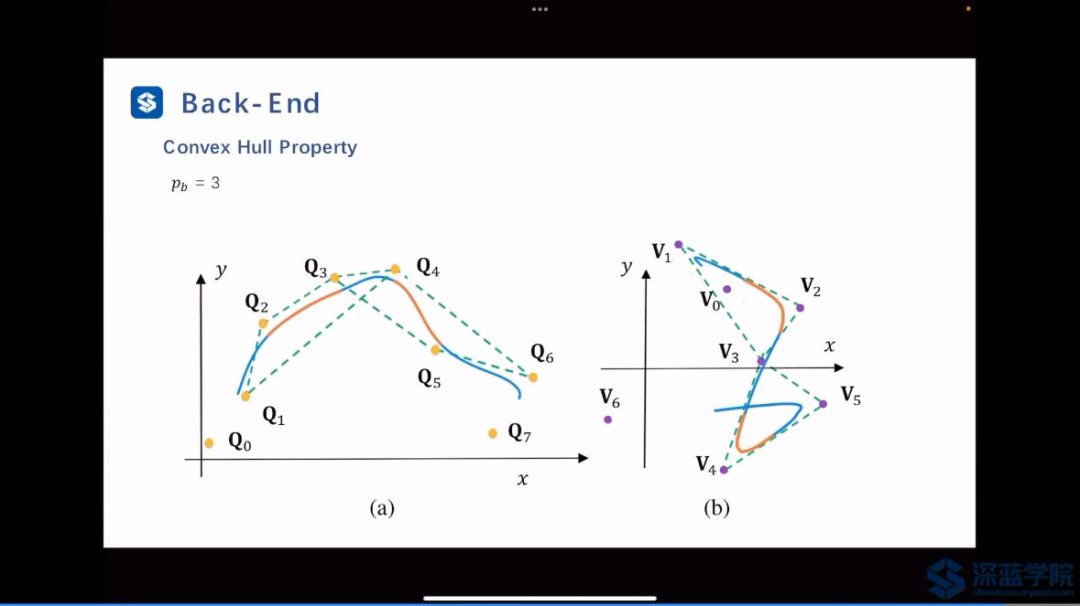
凸包性质可以用来collision-free: