STC32G12K128-旋转编码器-软件去抖
STC32G12K128-旋转编码器-软件去抖
- 简介
- 代码
简介
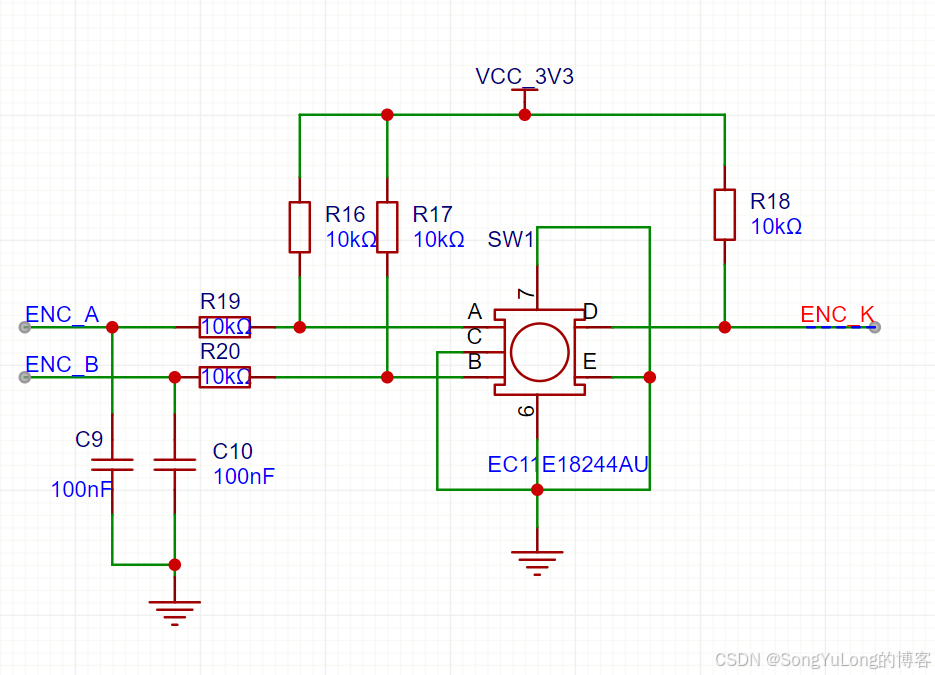
EC11旋转编码器是一种可以连续旋转的器件A,B,C为旋转编码引脚,带按键的有D,E引脚。引脚功能:
- A:编码器A相;
- B:编码器B相;
- C:公共端-一般接到GND;
- D/E:按键,按下时D,E导通,和普通按键功能相似;
当旋转编码器时:A,B两个端子的开关相继导通。 内部机械结构的设计保证了:顺时针旋转时A超前于B的相位。逆时针旋转时B超前于A的相位。

解码原理:
- A相接单片机外部中断引脚,设为下降沿触发;
- B相接单片机GPIO引脚,设置为输入引脚;
- 旋转编码器时A相下降沿触发中断,中断服务程序里延时50us判断A相是否为电平(去抖操作)
- A相下降去抖后延时100us判断B相电平,低电平是顺时针旋转,高电平是逆时针旋转;
- 两个延时时间根据实际情况耐心微调,可以达到很好的去抖效果,本例实测超慢速度~超快速度,均能连续正确解码旋转方向值;
代码
drv_encoder.h
#ifndef __DRV_ENCODER_H__
#define __DRV_ENCODER_H__enum {E_ENCODER_N=0,E_ENCODER_L=1,E_ENCODER_R
};void drv_encoder_init(void);uint8_t drv_encoder_value(void);void drv_encoder_notify(void);#endifdrv_encoder.c
#include "STC32G_Timer.h"
#include "STC32G_GPIO.h"
#include "STC32G_NVIC.h"
#include "STC32G_Exti.h"
#include "STC32G_Delay.h"#include "app_config.h"
#include "drv_encoder.h"
#include "debug.h"#if TCFG_DRV_ENCODER_SUPPORT#define D_ENCIO_A P33 // 编码器A相
#define D_ENCIO_B P34 // 编码器B相
static uint8_t encoder_value = E_ENCODER_N;void delay_us(unsigned int us)
{unsigned char data i;while(--us) {_nop_();_nop_();i = 3;while (--i);}
}void drv_encoder_init(void)
{EXTI_InitTypeDef Exti_InitStructure;P3_SPEED_LOW(GPIO_Pin_3|GPIO_Pin_4);// P3_SPEED_HIGH(GPIO_Pin_3|GPIO_Pin_4);P3_DRIVE_MEDIUM(GPIO_Pin_3|GPIO_Pin_4);// P3_DRIVE_HIGH(GPIO_Pin_3|GPIO_Pin_4);// P3_PULL_UP_ENABLE(GPIO_Pin_3|GPIO_Pin_4);P3_PULL_UP_DISABLE(GPIO_Pin_3|GPIO_Pin_4);// P3_MODE_IO_PU(GPIO_Pin_3|GPIO_Pin_4);P3_MODE_IN_HIZ(GPIO_Pin_3|GPIO_Pin_4);P3_DIGIT_IN_ENABLE(GPIO_Pin_3|GPIO_Pin_4);Exti_InitStructure.EXTI_Mode = EXT_MODE_Fall;//中断模式, EXT_MODE_RiseFall,EXT_MODE_FallExt_Inilize(EXT_INT1, &Exti_InitStructure); //初始化NVIC_INT1_Init(ENABLE,Priority_1); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3}/*** @brief 旋转编码器 通知* @param 无* @note * @return 无
*/
void drv_encoder_notify(void)
{encoder_value = E_ENCODER_N;
}/*** @brief 获取旋转编码器值* @param 无* @note 同时设置编码器值为none* @return 0:无操作,1:左旋转(逆时针),2:右旋转(顺时针)
*/
uint8_t drv_encoder_value(void)
{uint8_t enc_value = encoder_value; drv_encoder_notify();return enc_value;
}/*** @brief 编码器A相中断处理函数* @note 下降沿触发* @return 无
*/
void INT1_ISR_Handler (void) interrupt INT1_VECTOR //进中断时已经清除标志
{// TODO: 旋转编码器去抖,A相中断下降沿触发,延时50us判断A相是否为低电平,为低延时100us判断B相电平 0=右旋转(顺时针),1=左旋转(逆时针)D_ENCIO_A = 1;delay_us(50);if (0 == D_ENCIO_A) {D_ENCIO_B = 1;delay_us(100);if (D_ENCIO_B == 0) {encoder_value = E_ENCODER_R;} else {encoder_value = E_ENCODER_L;}}
}#endif //TCFG_DRV_ENCODER_SUPPORTmain.c
#include "drv_encoder.h"void main(void)
{uint8_t enc_value;// 系统初始化// ......// 旋转编码器drv_encoder_init();enc_value = drv_encoder_value();if (E_ENCODER_N != enc_value) { if (E_ENCODER_L == enc_value) {log_d("E_ENCODER_L\n");} else if (E_ENCODER_R == enc_value) {log_d("E_ENCODER_R\n");}}
}