【MATLAB例程】水下机器人AUV的长基线定位,适用于三维环境,EKF融合长基线和IMU数据,锚点数量可自适应,附下载链接

本本文所述程序实现了 水下机器人(AUV)长基线(LBL)+ IMU在三维空间中的定位融合,采用扩展卡尔曼滤波(EKF)方法来融合较高频率的IMU数据和较低频率的声学基站测距数据,从而获得更准确、稳定的轨迹估计结果。
文章目录
- 程序简介
- 仿真场景
- 程序介绍
- 运行结果
- MATLAB源代码
程序简介
仿真场景
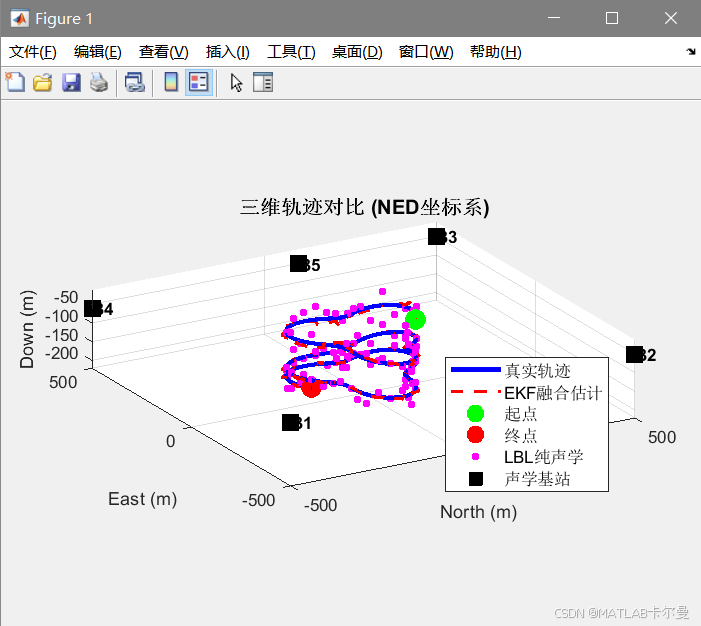
- 轨迹生成:采用 螺旋下潜 + 正弦调制 的复杂三维轨迹,符合水下探测场景。
- 基站配置:采用4~无穷个声学基站的三维布局,提升几何可观性。设置好基站坐标后,后续程序可自动调整架构
- 传感器建模:IMU 数据引入 噪声 + 偏差,声学测距包含 高斯噪声 + 多径效应。
程序介绍
本程序实现了 水下机器人(AUV)长基线(LBL)+ IMU 三维定位融合,采用 扩展卡尔曼滤波(EKF) 方法来融合 高频IMU数据 和 低频声学基站测距数据,从而获得更准确、稳定的轨迹估计结果。
功能特点:
-
轨迹生成
- 机器人按照 螺旋下潜 + 正弦调制 的复杂三维轨迹运动,模拟真实的水下探测任务。
-
传感器建模
- IMU:模拟加速度计与陀螺仪,包含噪声和偏差。
- LBL:声学基站测距,包含高斯噪声和多径效应。
-
滤波框架
- 采用 扩展卡尔曼滤波,实现对位置、速度及传感器偏差的估计。
- 声学观测低频、IMU观测高频,二者融合能弥补单一传感器的不足。
适用场景:
- 水下机器人自主导航与定位仿真
- 多传感器融合算法教学与演示
- 声学定位系统的性能分析
- EKF滤波框架的工程应用研究
运行结果
轨迹图与锚点(基站)位置示意图,三维:
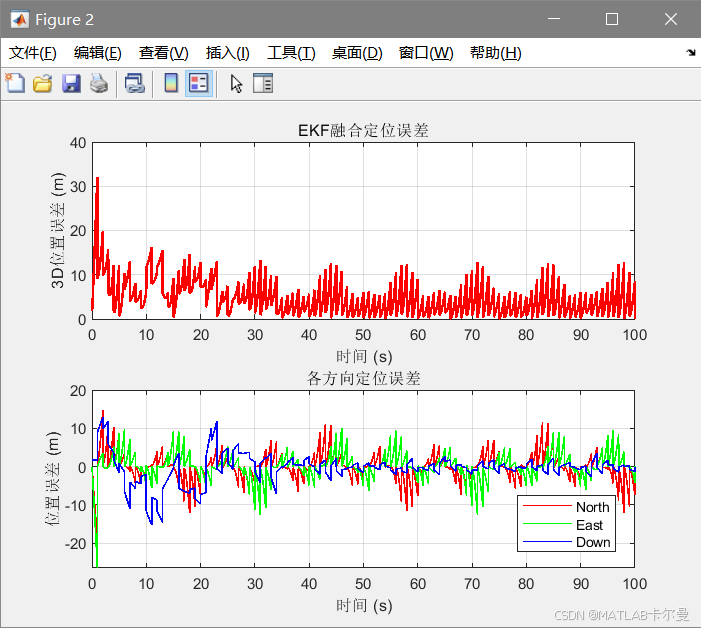
误差曲线:
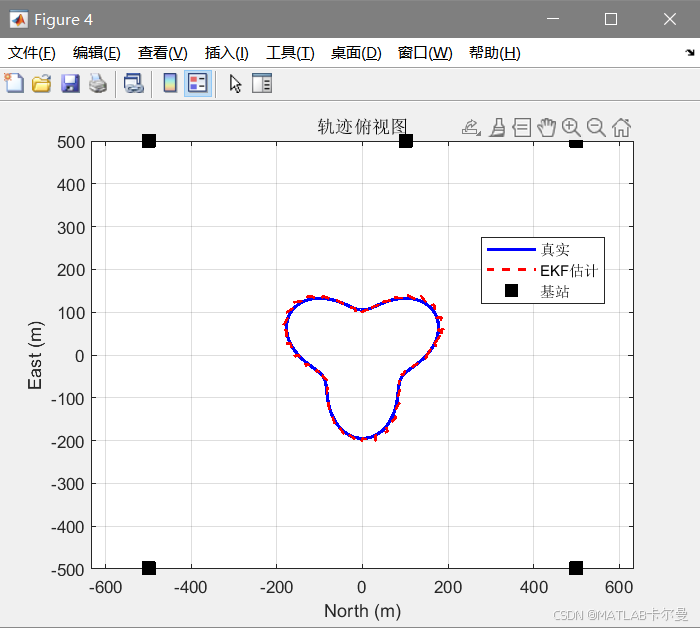
二维轨迹图:
命令行窗口输出的结果:
开始EKF滤波处理...
处理进度: 1000/10001 (10.0%)
处理进度: 2000/10001 (20.0%)
处理进度: 3000/10001 (30.0%)
处理进度: 4000/10001 (40.0%)
处理进度: 5000/10001 (50.0%)
处理进度: 6000/10001 (60.0%)
处理进度: 7000/10001 (70.0%)
处理进度: 8000/10001 (80.0%)
处理进度: 9000/10001 (90.0%)
处理进度: 10000/10001 (100.0%)
滤波处理完成!=== EKF融合定位性能评估 ===
3D RMSE: 5.995 m
平均误差: 4.718 m
最大误差: 32.136 m
误差标准差: 3.700 m
North RMSE: 3.303 m
East RMSE: 3.286 m
Down RMSE: 3.773 m=== LBL纯声学定位性能 ===
3D RMSE: 21.907 m
平均误差: 16.954 m
最大误差: 62.525 m=== 性能改进 ===
融合相对改进: 72.6%
EKF融合定位优于纯LBL定位=== 系统配置信息 ===
仿真时长: 100.0 秒
IMU频率: 100 Hz
声学定位频率: 1.0 Hz
总计算点数: 10001
声学更新次数: 101=== 滤波器一致性分析 ===
位置估计偏差 [N,E,D]: [-0.072, 0.073, -0.411] m
速度估计偏差 [N,E,D]: [-0.145, 0.250, -0.000] m/s
估计加速度偏差: [-7.0385, -3.3170, 19.4977] m/s²
估计陀螺偏差: [0.0000, 0.0000, 0.0000] rad/s=== 收敛性分析 ===
初始位置误差: 1.827 m
最终位置误差: 0.112 m
误差收敛比: 0.06
滤波器成功收敛
>> MATLAB源代码
部分代码如下:
%% 水下机器人长基线(LBL),三维轨迹定位,使用EKF滤波,融合LBL和IMU,锚点数量自适应
% 适用于AUV自主导航与定位
% 作者: matlabfilter
% 2025-08-19/Ver1clear; clc; close all;
rng(0);
% 水下长基线定位与IMU融合系统
% 使用扩展卡尔曼滤波进行多传感器融合
% 坐标系:NED (North-East-Down)%% 系统参数设置
% 基站配置(四面体配置,单位:米)
beacon_positions = [-500, -500, -50; % 基站1 (西北)500, -500, -50; % 基站2 (东北)500, 500, -50; % 基站3 (东南)-500, 500, -60 % 基站4 (西南,深度不同)100,500,-50];% 仿真参数
dt_imu = 0.01; % IMU采样间隔 (100Hz)
dt_acoustic = 1; % 声学定位间隔
total_time = 100; % 总仿真时间 (秒)
sound_speed = 1500; % 声速 m/s% 噪声参数(符合实际水下设备精度)
range_noise_std = 0.2; % 距离测量噪声标准差(20cm)
imu_acc_noise_std = 0.002; % 加速度计噪声 (0.02 m/s²)
imu_gyro_noise_std = 0.001; % 陀螺仪噪声 (0.01 rad/s)
imu_bias_acc = 0.01*[0.01, -0.02, 0.015]; % 加速度计偏差%% 生成真实轨迹(复杂的水下探测轨迹)
t = 0:dt_imu:total_time;
n_steps = length(t);% 轨迹参数
R = 150; % 基础螺旋半径
omega = 2*pi/40; % 螺旋角频率
descent_rate = -1.5; % 基础下沉速度 m/s% 生成真实状态(位置、速度、加速度)
true_pos = zeros(n_steps, 3);
true_vel = zeros(n_steps, 3);
true_acc = zeros(n_steps, 3);
true_euler = zeros(n_steps, 3); % 欧拉角 (roll, pitch, yaw)for i = 1:n_steps% 复杂轨迹:螺旋下降 + 正弦调制phase = omega * t(i);r_mod = R * (1 + 0.3 * sin(3 * phase)); % 半径调制% 位置 (NED坐标系)true_pos(i,1) = r_mod * cos(phase); % Northtrue_pos(i,2) = r_mod * sin(phase); % Easttrue_pos(i,3) = -50 + descent_rate * t(i) + 20 * sin(phase/2); % Down% 速度true_vel(i,1) = -r_mod * omega * sin(phase) + 0.3 * R * omega * sin(3*phase) * cos(phase);true_vel(i,2) = r_mod * omega * cos(phase) + 0.3 * R * omega * sin(3*phase) * sin(phase);true_vel(i,3) = descent_rate + 10 * omega * cos(phase/2);% 加速度if i > 1true_acc(i,:) = (true_vel(i,:) - true_vel(i-1,:)) / dt_imu;end
完整代码的下载链接:https://download.csdn.net/download/callmeup/91709601
或:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者