【Bluedroid】btif_a2dp_sink_init 全流程源码解析
本文以蓝牙 A2DP(Advanced Audio Distribution Profile)Sink 模块的初始化流程为核心,结合Android代码实现,详细解析模块状态管理、线程生命周期控制、线程安全队列创建及实时调度策略设置等关键步骤。重点分析原子状态变量、互斥锁、信号量队列及实时线程调度在多线程环境下的协同工作机制,揭示蓝牙音频模块初始化过程中确保实时性、可靠性和线程安全的核心设计逻辑。
一、概述
1.1 核心组件与初始化流程总览
蓝牙 A2DP Sink 模块的初始化由btif_a2dp_sink_init函数驱动,依赖以下核心组件协同工作:
原子状态变量:
btif_a2dp_sink_state(线程安全的状态标记);控制块:
BtifA2dpSinkControlBlock(封装模块资源与状态);消息循环线程:
MessageLoopThread(处理异步任务的线程容器);固定队列:
fixed_queue_t(线程安全的音频数据缓存队列);实时调度:
EnableRealTimeScheduling(提升线程实时性的系统调用)。
1.2 关键步骤解析
蓝牙A2DP接收器负责接收并播放来自源设备的高质量音频流。初始化过程需确保线程安全、资源就绪和实时性保障。
(1) 状态检查与互斥锁保护
初始化前通过原子变量btif_a2dp_sink_state检查模块是否处于关闭状态(BTIF_A2DP_SINK_STATE_OFF),并使用互斥锁g_mutex确保多线程环境下初始化操作的原子性,避免重复初始化。
(2) 控制块重置与状态更新
调用BtifA2dpSinkControlBlock::Reset释放旧资源(如音频轨道、定时器),并重置成员变量。随后将状态更新为BTIF_A2DP_SINK_STATE_STARTING_UP,标记模块进入启动中状态。
(3) 消息循环线程启动
通过MessageLoopThread::StartUp创建并启动工作线程:
使用promise/future同步机制确保主线程等待子线程完成初始化(如消息循环对象创建、线程 ID 记录);
子线程通过Run函数进入事件循环(run_loop_->Run()),持续处理异步任务。
(4) 音频队列创建与实时调度设置
创建固定容量的音频接收队列(fixed_queue_new(SIZE_MAX)),用于缓存蓝牙接收的音频数据。随后调用EnableRealTimeScheduling为工作线程设置实时调度策略(SCHED_FIFO),提升音频解码等关键任务的实时性。
(5) 延迟初始化完成状态标记
通过DoInThread将btif_a2dp_sink_init_delayed提交到工作线程执行,最终将状态更新为BTIF_A2DP_SINK_STATE_RUNNING,通知其他模块 “音频传输就绪”。
二、源码解析
btif_a2dp_sink_init
packages/modules/Bluetooth/system/btif/src/btif_a2dp_sink.cc
// 定义一个静态的原子整数变量,用于在多线程环境下安全地记录蓝牙 A2DP 接收器的状态,并且初始状态为关闭
static std::atomic<int> btif_a2dp_sink_state{BTIF_A2DP_SINK_STATE_OFF};using LockGuard = std::lock_guard<std::mutex>;# define SIZE_MAX (18446744073709551615UL)bool btif_a2dp_sink_init() {log::info("");// 使用互斥锁保护共享资源,确保在同一时间只有一个线程可以执行该函数内的关键代码段LockGuard lock(g_mutex);// 检查 A2DP 接收器的状态是否已经不是关闭状态if (btif_a2dp_sink_state != BTIF_A2DP_SINK_STATE_OFF) {// 如果不是关闭状态,返回 false 表示初始化失败log::error("A2DP Sink media task already running");return false;}// 重置 A2DP 接收器的回调函数结构体,清除之前可能存在的状态btif_a2dp_sink_cb.Reset();// 将 A2DP 接收器的状态设置为启动中btif_a2dp_sink_state = BTIF_A2DP_SINK_STATE_STARTING_UP;// 启动 A2DP 接收器的媒体任务线程btif_a2dp_sink_cb.worker_thread.StartUp();// 检查线程是否成功启动if (!btif_a2dp_sink_cb.worker_thread.IsRunning()) {// 如果线程未能成功启动,将接收器状态设置为关闭,并返回 false 表示初始化失败log::error("unable to start up media thread");btif_a2dp_sink_state = BTIF_A2DP_SINK_STATE_OFF;return false;}// 创建一个固定大小的音频接收队列,队列大小为 SIZE_MAXbtif_a2dp_sink_cb.rx_audio_queue = fixed_queue_new(SIZE_MAX);// 尝试为媒体任务线程启用实时调度策略if (!btif_a2dp_sink_cb.worker_thread.EnableRealTimeScheduling()) {// 如果在 Android 平台上且启用实时调度失败,记录致命错误日志
#if defined(__ANDROID__)log::fatal("Failed to increase A2DP decoder thread priority");
#endif}// 安排在媒体任务线程中执行 btif_a2dp_sink_init_delayed 函数,完成后续的初始化操作btif_a2dp_sink_cb.worker_thread.DoInThread(FROM_HERE, base::BindOnce(btif_a2dp_sink_init_delayed));// 如果所有操作都成功,返回 true 表示初始化成功return true;
}初始化蓝牙 A2DP接收器。检查接收器的状态,启动媒体任务线程,创建音频队列,设置线程调度策略,并安排后续的初始化操作。
btif_a2dp_sink_cb.Reset
/packages/modules/Bluetooth/system/btif/src/btif_a2dp_sink.cc
static BtifA2dpSinkControlBlock btif_a2dp_sink_cb("bt_a2dp_sink_worker_thread"); // 使用指定的线程名称,调用该类的构造函数对其进行初始化/* BTIF A2DP Sink control block */
class BtifA2dpSinkControlBlock {public:// 构造函数explicit BtifA2dpSinkControlBlock(const std::string& thread_name) // explicit 用于防止隐式类型转换,确保只能通过显式调用构造函数来创建 BtifA2dpSinkControlBlock对象: worker_thread(thread_name),rx_audio_queue(nullptr),rx_flush(false),decode_alarm(nullptr),sample_rate(0),channel_count(0),rx_focus_state(BTIF_A2DP_SINK_FOCUS_NOT_GRANTED),audio_track(nullptr),decoder_interface(nullptr) {}// Reset方法用于重置 BtifA2dpSinkControlBlock 对象的状态,释放已分配的资源,并将所有成员变量恢复到初始状态void Reset() {if (audio_track != nullptr) {BtifAvrcpAudioTrackStop(audio_track); // 停止音频轨道BtifAvrcpAudioTrackDelete(audio_track); // 删除音频轨道}audio_track = nullptr;fixed_queue_free(rx_audio_queue, nullptr);rx_audio_queue = nullptr;alarm_free(decode_alarm);decode_alarm = nullptr;// 状态重置rx_flush = false;rx_focus_state = BTIF_A2DP_SINK_FOCUS_NOT_GRANTED;sample_rate = 0;channel_count = 0;decoder_interface = nullptr;}// 成员变量MessageLoopThread worker_thread; // 用于处理与 A2DP 接收器相关的消息循环和线程操作fixed_queue_t* rx_audio_queue; // 用于存储接收到的音频数据bool rx_flush; /* discards any incoming data when true */alarm_t* decode_alarm; // 用于管理解码定时器tA2DP_SAMPLE_RATE sample_rate; // 音频采样率tA2DP_BITS_PER_SAMPLE bits_per_sample; // 每个样本的位数tA2DP_CHANNEL_COUNT channel_count; // 音频通道数btif_a2dp_sink_focus_state_t rx_focus_state; /* audio focus state */ //音频焦点状态void* audio_track; // 指向音频轨道的指针,用于播放音频数据const tA2DP_DECODER_INTERFACE* decoder_interface; // 用于调用音频解码器的接口
};BtifA2dpSinkControlBlock 类是用于管理蓝牙 A2DP接收器控制块的类。通过构造函数初始化成员变量,并提供Reset 方法来重置对象的状态和释放资源。封装了与蓝牙 A2DP 接收器相关的各种状态和资源,方便对 A2DP 接收器进行管理和控制。
btif_a2dp_sink_cb.worker_thread.StartUp
packages/modules/Bluetooth/system/common/message_loop_thread.cc
void MessageLoopThread::StartUp() {// 1. 同步机制初始化// 用于在线程间传递同步信号。start_up_promise会在子线程启动完成后通过set_value()通知主线程std::promise<void> start_up_promise; // 与promise绑定,主线程通过start_up_future.wait()阻塞等待子线程启动完成的信号std::future<void> start_up_future = start_up_promise.get_future();{// 2. 线程安全锁// 保证StartUp方法的线程安全性,防止多线程并发调用时出现竞态条件std::lock_guard<std::recursive_mutex> api_lock(api_mutex_);// 3. 重复启动检查if (thread_ != nullptr) {LOG(WARNING) << __func__ << ": thread " << *this << " is already started";return;}// 4. 创建并启动线程thread_ = new std::thread(&MessageLoopThread::RunThread, this,std::move(start_up_promise));}// 5. 等待线程启动完成// 主线程阻塞等待,直到子线程中调用start_up_promise.set_value()(表示子线程已成功启动)start_up_future.wait();
}安全、同步地启动一个消息循环线程,主要特点包括:
线程安全:通过互斥锁
api_mutex_防止多线程并发调用StartUp。防重复启动:通过检查
thread_指针避免重复创建线程。同步等待:使用
promise/future机制确保主线程等待子线程完全启动后再返回。
递归互斥锁允许同一线程多次加锁(例如:线程在启动过程中可能递归调用其他需要加锁的接口),避免死锁。
MessageLoopThread::RunThread
packages/modules/Bluetooth/system/common/message_loop_thread.cc
// 将线程执行逻辑转发给 Run 方法
// Non API method, should not be protected by API mutex
void MessageLoopThread::RunThread(MessageLoopThread* thread,std::promise<void> start_up_promise) {thread->Run(std::move(start_up_promise));
}void MessageLoopThread::Run(std::promise<void> start_up_promise) {// 初始化阶段(加锁保护){std::lock_guard<std::recursive_mutex> api_lock(api_mutex_);LOG(INFO) << __func__ << ": message loop starting for thread "<< thread_name_;base::PlatformThread::SetName(thread_name_); // 设置线程名称(调试友好)message_loop_ = new btbase::AbstractMessageLoop(); // 创建消息循环对象run_loop_ = new base::RunLoop(); // 创建运行循环对象(控制事件循环)thread_id_ = base::PlatformThread::CurrentId(); // 记录线程ID(跨平台)linux_tid_ = static_cast<pid_t>(syscall(SYS_gettid)); // 记录Linux特有的线程ID(TID)start_up_promise.set_value(); // 通知主线程:线程初始化完成}// 消息循环运行(阻塞阶段)// Blocking until ShutDown() is calledrun_loop_->Run(); // 启动事件循环并阻塞在此处,等待处理消息或任务// 清理阶段(加锁保护){// 再次加锁 api_mutex_,确保清理过程中成员变量的修改是线程安全的std::lock_guard<std::recursive_mutex> api_lock(api_mutex_);thread_id_ = -1; // 重置线程ID(标记为未运行)linux_tid_ = -1;delete message_loop_; // 释放消息循环对象message_loop_ = nullptr;delete run_loop_; // 释放运行循环对象run_loop_ = nullptr;LOG(INFO) << __func__ << ": message loop finished for thread "<< thread_name_;}
}结合 StartUp、RunThread、Run 方法,线程的完整生命周期如下:
启动阶段(
StartUp): 主线程创建std::thread,绑定RunThread作为入口函数,并通过promise/future同步等待线程初始化完成。初始化阶段(
Run函数前半部分): 子线程加锁保护,初始化消息循环、记录线程 ID,并通过promise.set_value()通知主线程 “已就绪”。运行阶段(
run_loop_->Run()): 子线程进入事件循环,持续处理消息和任务,直到ShutDown被调用(触发run_loop_->Quit())。清理阶段(
Run函数后半部分): 子线程加锁保护,释放消息循环资源,重置线程状态,并记录结束日志。
关键设计点
线程安全:通过
api_mutex_递归互斥锁保护成员变量的修改(如初始化和清理阶段),避免多线程竞态条件。同步机制:
promise/future确保主线程等待子线程完全初始化后再返回,避免 “线程未就绪就使用” 的问题。资源管理:显式释放
message_loop_和run_loop_对象,防止内存泄漏。
syscall(SYS_gettid): syscall 是 Linux 提供的系统调用接口函数,用于直接调用内核功能。SYS_gettid 是一个预定义的宏(通常在 <unistd.h> 或 <sys/syscall.h> 中定义),对应内核中获取线程 ID 的系统调用号(例如,在 x86_64 架构下,SYS_gettid 的值为 186)。 调用 syscall(SYS_gettid) 会触发内核执行获取当前线程 TID 的操作,并返回该 TID(类型为 long)。
btif_a2dp_sink_cb.worker_thread.StartUp
packages/modules/Bluetooth/system/common/message_loop_thread.cc
bool MessageLoopThread::IsRunning() const {std::lock_guard<std::recursive_mutex> api_lock(api_mutex_);return thread_id_ != -1;
}通过检查成员变量 thread_id_ 是否为 -1,来判断线程是否处于运行状态。用于查询当前消息循环线程是否活跃,避免向已停止的线程发送任务或执行依赖操作。
fixed_queue_new
packages/modules/Bluetooth/system/osi/src/fixed_queue.cc
typedef struct fixed_queue_t {list_t* list;semaphore_t* enqueue_sem;semaphore_t* dequeue_sem;std::mutex* mutex;size_t capacity;reactor_object_t* dequeue_object;fixed_queue_cb dequeue_ready;void* dequeue_context;
} fixed_queue_t;static void internal_dequeue_ready(void* context);fixed_queue_t* fixed_queue_new(size_t capacity) {// 1. 分配队列结构体内存fixed_queue_t* ret =static_cast<fixed_queue_t*>(osi_calloc(sizeof(fixed_queue_t)));// 2. 初始化互斥锁和容量ret->mutex = new std::mutex;ret->capacity = capacity;// 3. 初始化底层存储链表ret->list = list_new(NULL);if (!ret->list) goto error;// 4. 初始化信号量ret->enqueue_sem = semaphore_new(capacity);if (!ret->enqueue_sem) goto error;ret->dequeue_sem = semaphore_new(0);if (!ret->dequeue_sem) goto error;return ret;error:fixed_queue_free(ret, NULL);return NULL;
}创建并初始化一个固定容量的队列。通过 信号量 + 互斥锁 实现了线程安全的固定容量队列:
容量控制:
enqueue_sem的初始值为capacity,确保入队操作不会超过队列容量(当队列满时,enqueue_sem为 0,新的入队操作阻塞)。空队列保护:
dequeue_sem的初始值为 0,确保出队操作在队列无元素时阻塞(当队列有元素时,dequeue_sem被递增,出队操作解除阻塞)。线程安全:
mutex互斥锁保证对链表list的修改(如入队时添加元素、出队时删除元素)是原子的,避免多线程并发操作导致的数据不一致。
这种固定容量的线程安全队列常用于生产者 - 消费者模型,例如:
蓝牙模块中,上层应用(生产者)向队列发送指令,底层驱动(消费者)从队列取出指令执行。
队列的固定容量避免内存无限增长,信号量机制自动协调生产者和消费者的速度差异。
fixed_queue_t 是队列的核心结构体,包含队列运行所需的所有状态和资源:
| 成员变量 | 类型 | 作用 |
| list | list_t* | 存储队列元素的链表(底层容器,具体实现类似双向链表 |
| enqueue_sem | semaphore_t* | 入队信号量:控制可入队的元素数量(初始值为队列容量 capacity) |
| dequeue_sem | semaphore_t* | 出队信号量:控制可出队的元素数量(初始值为 0,无元素时阻塞出队) |
| mutex | std::mutex* | 互斥锁:保证对队列的修改(如入队、出队)是线程安全的 |
| capacity | size_t | 队列的最大容量(固定不变) |
| dequeue_object | reactor_object_t* | 反应堆对象(可能用于异步事件通知,如出队就绪时触发回调) |
| dequeue_ready | fixed_queue_cb | 出队就绪回调函数(当队列有元素时触发) |
| dequeue_context | void* | 回调函数的上下文参数(传递用户自定义数据) |
btif_a2dp_sink_cb.worker_thread.EnableRealTimeScheduling
packages/modules/Bluetooth/system/common/message_loop_thread.cc
// 在 Linux 系统中,实时调度策略(如 SCHED_FIFO、SCHED_RR)的优先级范围是 1~99(数值越大优先级越高)
// 设置为 1 表示较低的实时优先级(避免过高优先级影响系统其他任务)
static constexpr int kRealTimeFifoSchedulingPriority = 1;bool MessageLoopThread::EnableRealTimeScheduling() {std::lock_guard<std::recursive_mutex> api_lock(api_mutex_);if (!IsRunning()) {LOG(ERROR) << __func__ << ": thread " << *this << " is not running";return false;}// 配置实时调度参数struct sched_param rt_params = {.sched_priority =kRealTimeFifoSchedulingPriority};// 调用系统调用设置实时调度策略int rc = sched_setscheduler(linux_tid_, SCHED_FIFO, &rt_params);if (rc != 0) {LOG(ERROR) << __func__ << ": unable to set SCHED_FIFO priority "<< kRealTimeFifoSchedulingPriority << " for linux_tid "<< std::to_string(linux_tid_) << ", thread " << *this<< ", error: " << strerror(errno);return false;}return true;
}通过 Linux 系统调用为运行中的蓝牙消息循环线程设置实时调度策略(SCHED_FIFO)和指定优先级,旨在提升线程的实时性能,确保关键任务的低延迟执行。其核心逻辑包括线程状态检查、调度参数配置、系统调用执行及错误处理,是蓝牙模块中保证实时性的重要机制。
SCHED_FIFO:调度策略,代表 “先入先出(First-In-First-Out)” 实时调度。该策略下,线程会一直运行直到主动阻塞(如等待 I/O)或被更高优先级线程抢占。权限要求:普通用户进程调用
sched_setscheduler设置实时调度策略时,通常会失败(需要root权限或CAP_SYS_NICE能力)。实际使用中,需要通过setcap命令为程序授予权限(如setcap cap_sys_nice+ep /path/to/executable)。优先级影响:实时优先级过高可能导致其他线程(如用户交互线程)无法获得 CPU 时间,需根据业务需求谨慎选择优先级(
1是较低的实时优先级)。
注意事项
实时调度策略(如SCHED_FIFO)通常用于需要精确控制时间的应用,如音频、视频处理等。但是,它们也可能对系统的其他部分产生负面影响。
只有在具有适当权限(如root权限)的情况下,才能成功将线程设置为实时调度策略。
std::recursive_mutex允许同一个线程多次锁定互斥锁而不会导致死锁。在复杂的场景下可能是有用的,但也需要小心使用,以避免不必要的复杂性或性能问题。
btif_a2dp_sink_init_delayed
packages/modules/Bluetooth/system/btif/src/btif_a2dp_sink.cc
// 保证对变量的读 / 写操作是原子的(不可分割),无需显式加锁即可在多线程环境下安全访问
static std::atomic<int> btif_a2dp_sink_state{BTIF_A2DP_SINK_STATE_OFF};static void btif_a2dp_sink_init_delayed() {log::info("");btif_a2dp_sink_state = BTIF_A2DP_SINK_STATE_RUNNING;
}A2DP Sink 模块初始化流程的 “最后一步”,通过延迟执行确保依赖资源就绪后,将模块状态标记为运行中,其他模块可据此状态安全地开始音频数据传输等操作。其核心作用是协调初始化流程的异步性,保证模块状态与实际运行能力的一致性。
原子性的意义:
在多线程场景中(如蓝牙协议栈的主线程、IO 线程、事件处理线程),多个线程可能同时读取或修改
btif_a2dp_sink_state。若使用普通int类型,可能因编译器优化(如指令重排)或 CPU 缓存不一致导致状态读取错误(竞态条件)。而原子类型通过硬件指令(如 x86 的LOCK前缀)保证操作的原子性,确保所有线程看到的状态是一致的。
启动流程:

logcat:

三、流程图
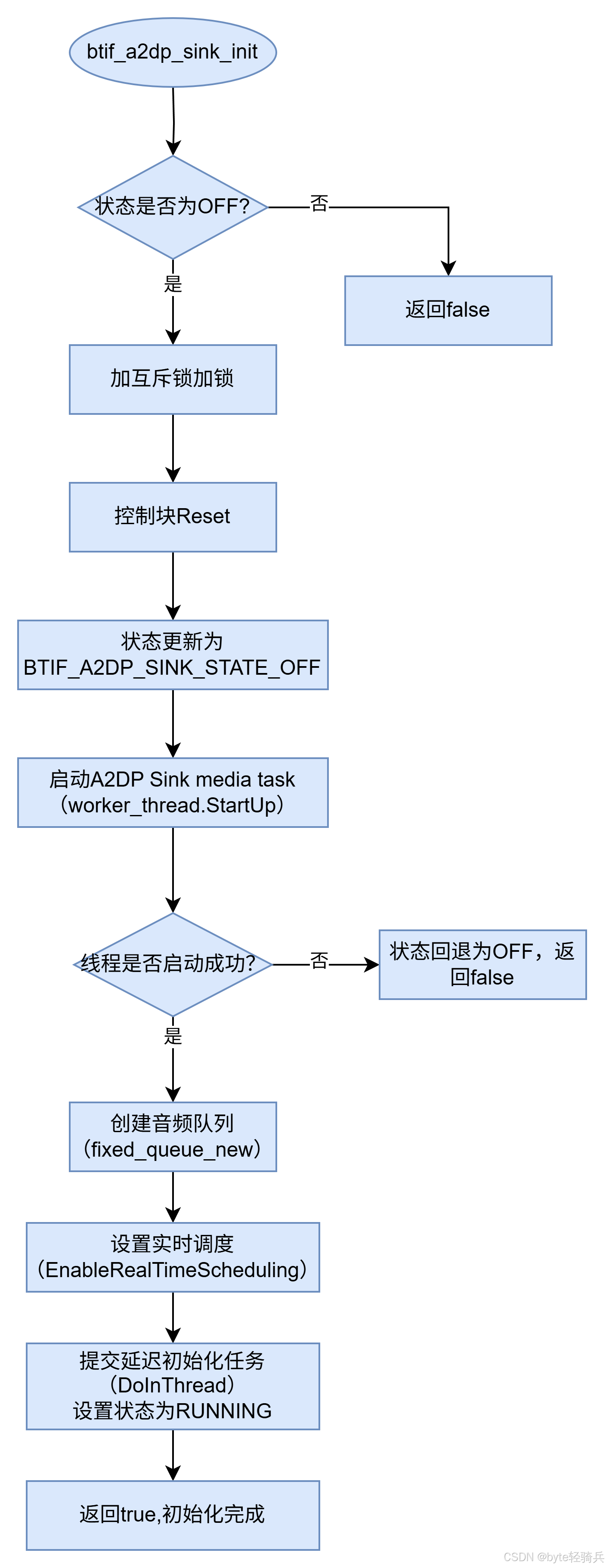
蓝牙 A2DP Sink 模块的初始化通过原子状态管理、线程安全控制、实时调度优化三大核心机制,确保了多线程环境下的可靠性与实时性:
线程安全:原子变量
btif_a2dp_sink_state与互斥锁g_mutex协同,避免状态竞争;资源管理:控制块
Reset方法显式释放旧资源,固定队列fixed_queue_t通过信号量限制容量,防止内存泄漏;实时性保证:
SCHED_FIFO调度策略结合低实时优先级(1),在提升音频任务响应速度的同时避免系统资源抢占;异步协调:
promise/future同步与延迟初始化机制,解决了初始化依赖(如线程就绪、资源准备)的异步性问题。