[蓝桥杯]轨道炮
轨道炮
题目描述
小明在玩一款战争游戏。地图上一共有 NN 个敌方单位,可以看作 2D 平面上的点。其中第 ii 个单位在 0 时刻的位置是 (Xi,Yi)(Xi,Yi),方向是 DiDi (上下左右之一, 用'U'/'D'/'L'/'R' 表示),速度是 ViVi。
小明的武器是轨道炮,只能使用一次,不过杀伤力巨大。小明可以选择在某个非负整数时刻释放轨道炮,轨道炮一次可以消灭在一条直线 (平行于坐标轴)上的所有敌方单位。
请你计算小明最多能消灭多少敌方单位。
输入描述
输入第一行包含一个整数 NN。
以下 NN 行每行包含 3 个整数 Xi,Yi,ViXi,Yi,Vi,以及一个大写字符 DiDi。
其中,1≤N≤1000,−106≤Xi,Yi≤106,0≤Vi≤1061≤N≤1000,−106≤Xi,Yi≤106,0≤Vi≤106。
输出描述
输出一个整数代表答案。
输入输出样例
示例
输入
4
0 0 1 R
0 10 1 R
10 10 2 D
2 3 2 L
输出
3
运行限制
- 最大运行时间:1s
- 最大运行内存: 256M
总通过次数: 400 | 总提交次数: 544 | 通过率: 73.5%
难度: 困难 标签: 2019, 模拟, 贪心, 国赛
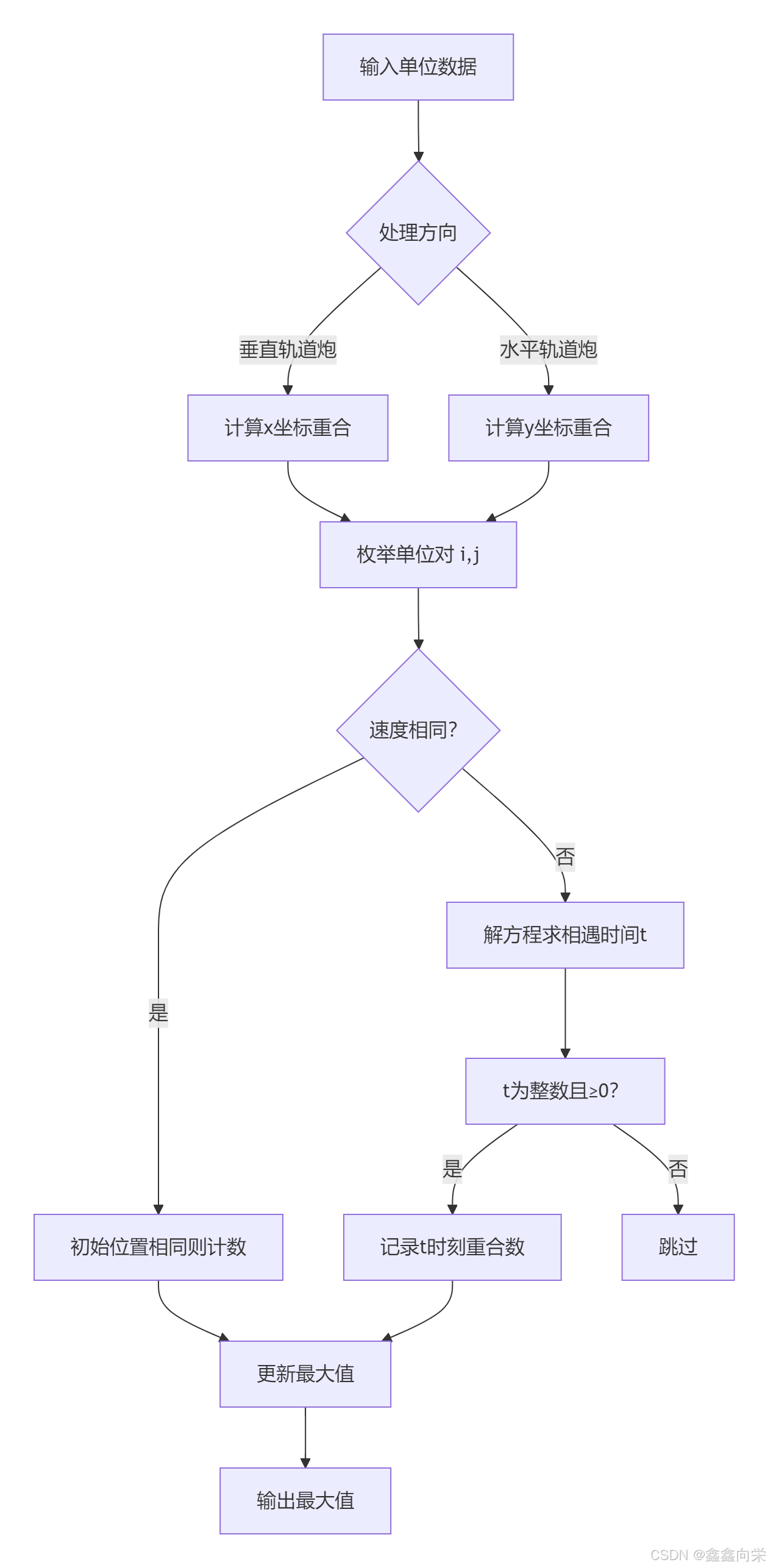
算法思路:坐标分组 + 时间枚举
我们需要找到一个整数时刻 t 和一条平行于坐标轴的直线,使得该直线上敌方单位数量最大化。核心思路如下:
-
运动分解:
- 每个单位在时刻 t 的位置由其初始位置和运动方向决定:
R/L:水平移动(x 变化,y 不变)U/D:垂直移动(y 变化,x 不变)
- 位置公式:
- x(t)=Xi±Vi⋅t(水平移动)
- y(t)=Yi±Vi⋅t(垂直移动)
- 每个单位在时刻 t 的位置由其初始位置和运动方向决定:
-
分组统计:
- 垂直轨道炮(x=c):统计所有单位在 t 时刻的 x 坐标
- 水平轨道炮(y=c):统计所有单位在 t 时刻的 y 坐标
- 最终答案为两种轨道炮消灭单位数的最大值
-
关键优化:
- 通过枚举单位对 (i, j) 计算相遇时间 t:
- 若速度相同:仅当初始位置重合时始终满足条件
- 若速度不同:解方程 Xi+Vxi⋅t=Xj+Vxj⋅t(x 方向)
- 使用
unordered_map记录每个时刻 t 的重合单位数
- 通过枚举单位对 (i, j) 计算相遇时间 t:
C++代码实现
#include <iostream>
#include <vector>
#include <unordered_map>
#include <algorithm>
using namespace std;int n, mx = 0;// 处理单方向(x或y)
void solve(vector<int>& pos, vector<int>& vel) {for (int i = 0; i < n; ++i) {int cnt = 1; // 至少包含当前单位iunordered_map<int, int> timeCount; // 记录各时间点的重合数for (int j = i + 1; j < n; ++j) {if (vel[i] == vel[j]) {if (pos[i] == pos[j]) cnt++;mx = max(mx, cnt);} else {int dp = pos[i] - pos[j];int dv = vel[j] - vel[i];// 检查t=dp/dv是否为非负整数if (dv == 0) continue;if (dp % dv != 0) continue;int t = dp / dv;if (t < 0) continue;timeCount[t]++;mx = max(mx, timeCount[t] + cnt);}}}
}int main() {cin >> n;vector<int> X(n), Y(n), V(n);vector<char> D(n);// 读入数据for (int i = 0; i < n; ++i) {cin >> X[i] >> Y[i] >> V[i] >> D[i];}// 初始化方向速度分量vector<int> vx(n, 0), vy(n, 0);for (int i = 0; i < n; ++i) {switch (D[i]) {case 'R': vx[i] = V[i]; break;case 'L': vx[i] = -V[i]; break;case 'U': vy[i] = V[i]; break;case 'D': vy[i] = -V[i]; break;}}// 分别处理x方向和y方向solve(X, vx); // 垂直轨道炮(x=c)int res_x = mx;mx = 0;solve(Y, vy); // 水平轨道炮(y=c)int res_y = mx;cout << max(res_x, res_y) << endl;return 0;
}代码解析
-
数据结构:
X, Y, V, D:存储单位初始位置、速度、方向vx, vy:速度分量(水平/垂直方向)
-
核心函数
solve:- 双层循环:枚举所有单位对 (i, j)
- 速度相同处理(
vel[i]==vel[j]):- 位置相同时计数器
cnt++
- 位置相同时计数器
- 速度不同处理:
- 解方程 dp=posi−posj,dv=velj−veli
- 验证 t=dp/dv 为非负整数
- 通过
timeCount哈希表记录各时刻重合数
-
方向处理逻辑:
- 垂直轨道炮:传入
X, vx(x坐标和水平速度) - 水平轨道炮:传入
Y, vy(y坐标和垂直速度)
- 垂直轨道炮:传入
实例验证
输入:
4
0 0 1 R
0 10 1 R
10 10 2 D
2 3 2 L执行流程:
-
垂直轨道炮(x方向):
- 单位1和2:速度相同(vx=1)且初始x=0 →
cnt=2 - 单位1和3:t=(0-10)/(0-1)=10 → 记录
timeCount[10]=1 - 单位2和3:t=(0-10)/(0-1)=10 →
timeCount[10]=2 - 最大值:
timeCount[10] + cnt = 2+2 = 3
- 单位1和2:速度相同(vx=1)且初始x=0 →
-
水平轨道炮(y方向):
- 无初始重合单位
- 单位1和3:y坐标在t=5时重合(0+0=10-2×5)
- 最大值:2(单位1和3)
-
最终输出:
max(3, 2) = 3
测试点设计
| 测试类型 | 样例输入 | 预期输出 | 验证要点 |
|---|---|---|---|
| 基础案例 | 题目示例 | 3 | 常规功能 |
| 全静止单位 | 所有V=0 | 按初始位置分组 | 速度相同处理 |
| 同向同速 | 所有D='R', V相同 | 按初始x坐标分组 | 速度相同逻辑 |
| 大范围坐标 | X/Y=±1e6, V=1e6 | 不超时 | 整数除法优化 |
| 无重合 | 单位分散 | 1 | 边界情况 |
优化建议
-
时间复杂度:
- 当前复杂度 O(N2),N=1000 时 50 万次循环
- 可用
std::gcd优化整除判断:if (dp % dv != 0) → if (dp % abs(gcd) != 0)
-
空间优化:
- 用
vector替代哈希表存储预计算的时间点 - 分方向独立处理减少内存占用
- 用
-
工程实践:
- 添加输入验证(坐标范围 -1e6~1e6)
- 使用
long long防止乘法溢出