1.1 ROS1应用商店APT源
新建终端,执行命令,能初始化就行
sudo rosdev init
再新建终端,执行命令,这个命令是启动ROS系统
roscore再新建终端,执行命令
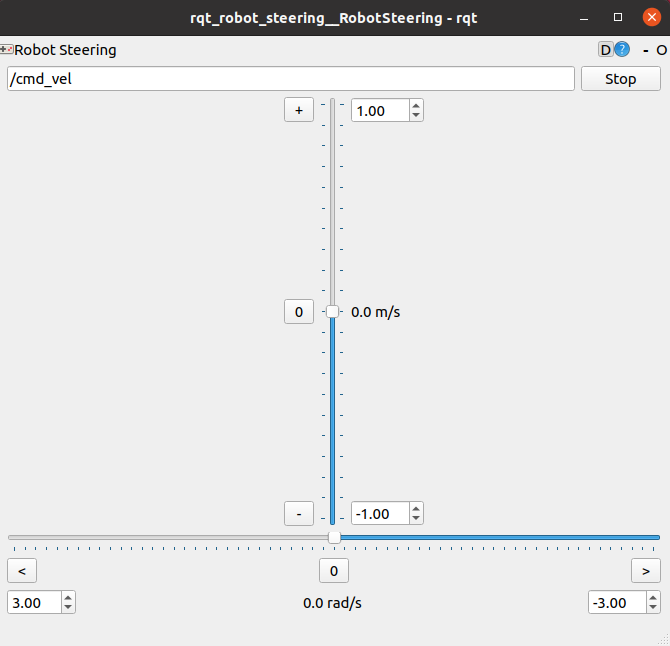
rosrun rqt_robot_steering rqt_robot_steering出现窗口
结合实例学习一下:
再打开一个终端,执行命令
rosrun turtlesim turtlesim_node
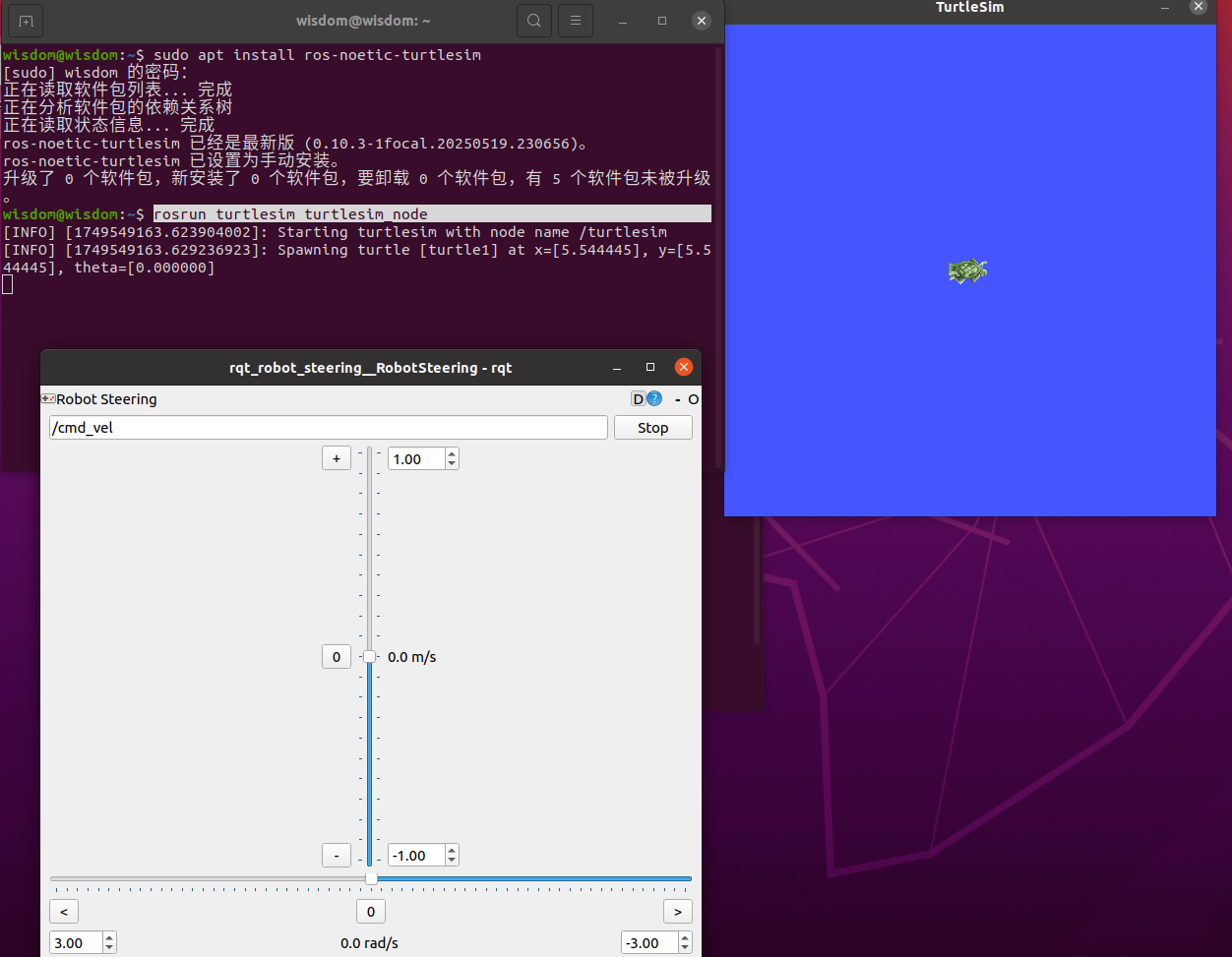
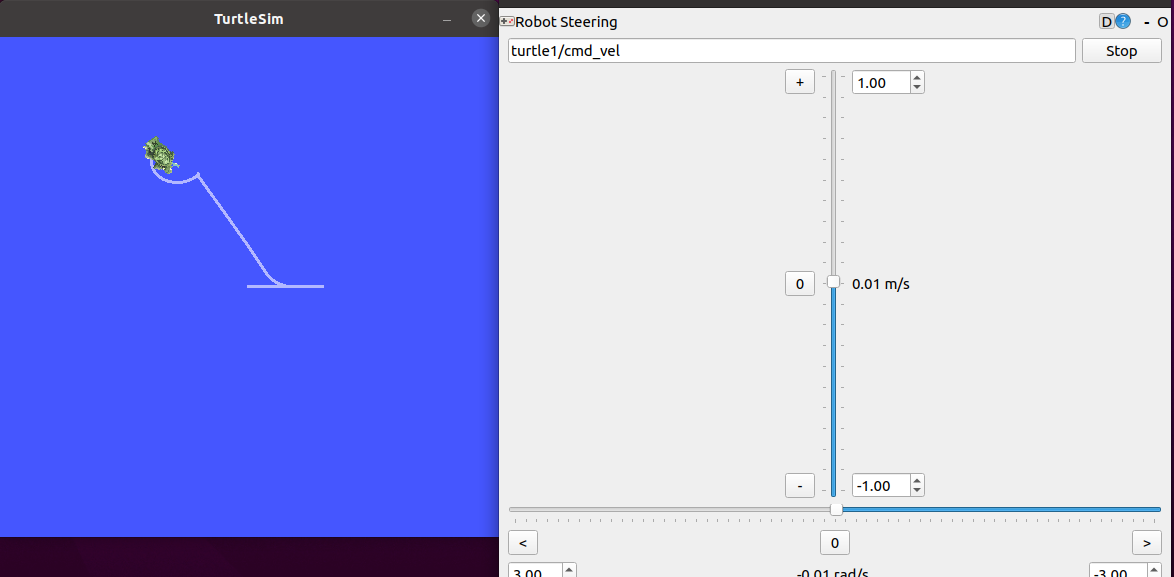
出现小乌龟界面 ,在/cmd_velq加上turtle1,然后拖动按钮就可以实现小乌龟的运动