1.2 git使用
例子1
创建工作空间
首先返回主目录
cd ~然后依次执行命令,src就是存放源码的地方
mkdir catkin_ws
cd catkin_ws
mkdir src
cd src进行项目克隆
git clone https://github.com/6-robot/wpr_simulation.git
下载内容示意与文件夹结构
进入scripts文件夹,然后执行命令,这个操作目的是安装依赖项
./install_for_neotic.sh然后回退到catkin_ws文件下,执行编译命令
catkin_make加载环境
source ~/catkin_ws/devel/setup.bash执行编译好的ros程序
roslaunch wpr_simulation wpb_simple.launch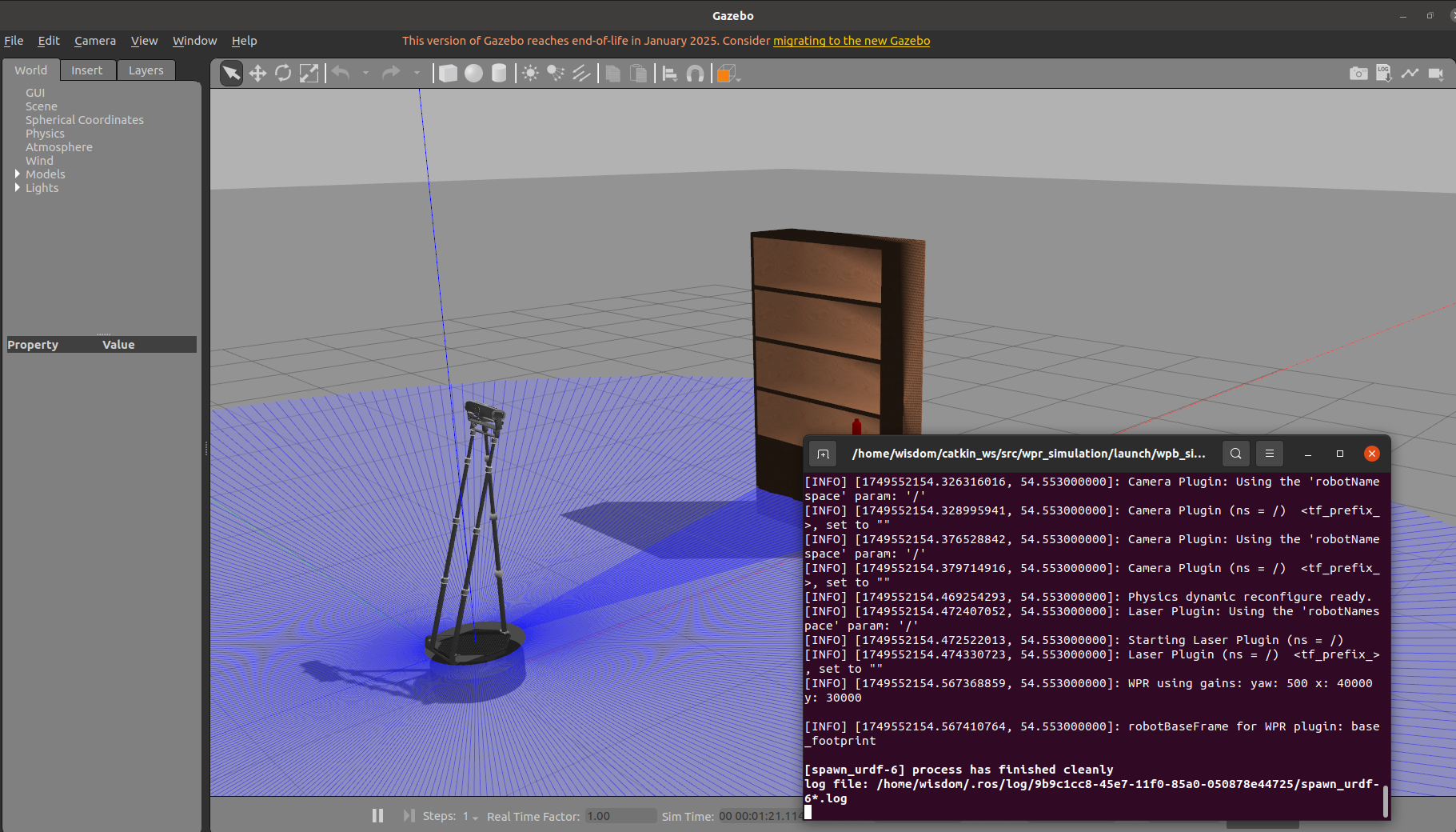
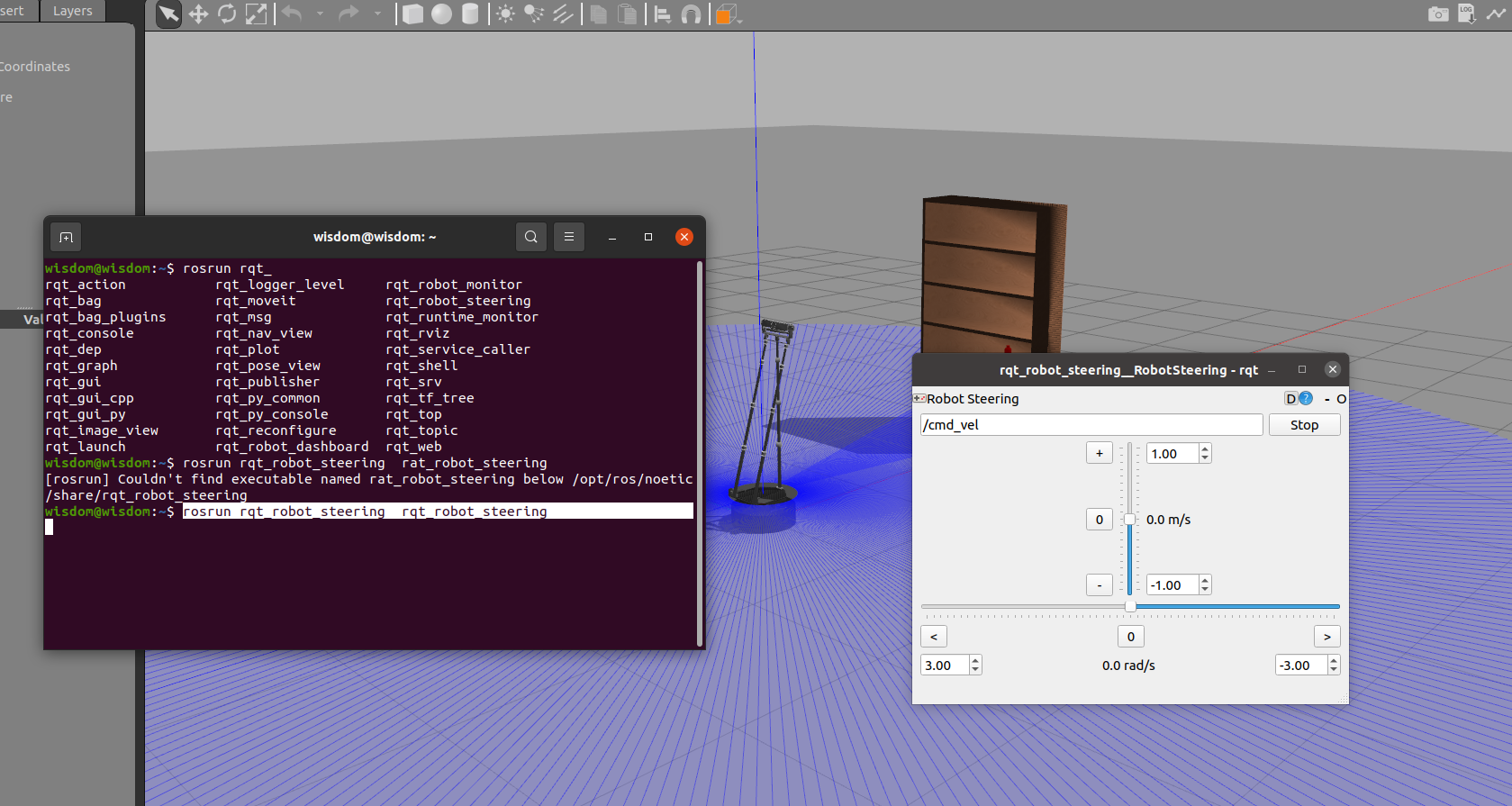
再启动一个终端,执行命令 ,来控制机器人运动
rosrun rqt_robot_steering rqt_robot_steering
配置永久环境
进入主目录,执行命令
gedit ~/.bashrc在文本编辑器最后一行键入
source ~/catkin_ws/devel/setup.bash
保存后退出
例子2
先进人src目录
git clone https://github.com/ros/ros_tutorials.git切换对应版本的小海龟,因为默认平台为ros2,执行这个命令之前需要进入目录:~/catkin_ws/src/ros_tutorials
git checkout noetic-devel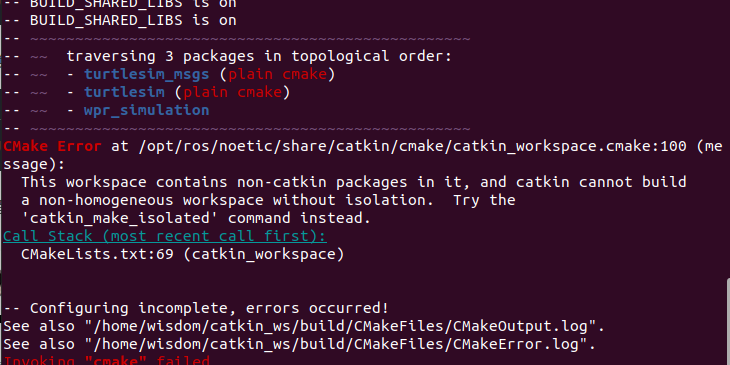
后面的操作一致,请自行探索