电路图识图基础知识-电动机制动控制电路(十八)
电动机制动控制电路
由于机械惯性,三相异步电动机从切除电源到完全停止旋转,要经过一定的时间,这往往不能满足生产机械要求迅速停车的要求,也影响生产效率的提高。因此应对电动机进行制动控制。制动控制方法有机械制动和电气制动。所谓的机械制动是用机械装置产生机械力来强迫电动机迅速停车,机械力的产生又有由纯机械装置和电磁抱闸两种方式;电气制动是使电动机的
电磁转矩方向与电动机旋转方向相反,起制动作用。电气制动有反接制动、能耗制动、再生制 动,以及派生的电容制动等。这些制动方法各有特点,适用不同场合,现介绍常用的反接制动 和能耗制动控制电路。
电动机单向反接制动控制
反接制动是利用改变电动机电源的相序,使定子绕组产生相反方向的旋转磁场,因而 产生制动转矩的一种制动方法。电源反接制动时,转子与定子旋转磁场的相对转速接近两 倍的电动机同步转速,所以定子绕组中流过的反接制动电流相当于全压启动时启动电流的 两倍,因此反接制动制动转矩大,制动迅速,冲击大,通常适用于10KW 及以下的小容量 电动机。
为了降低冲击电流,通常在笼型异步电动机定子电路中串入反接制动电阻。另外,当电动机转速接近零时,要及时切断反相序电源,以防电动机反向再启动,通常用速度继电器来检测电动机转速并控制电动机反相序电源的断开。
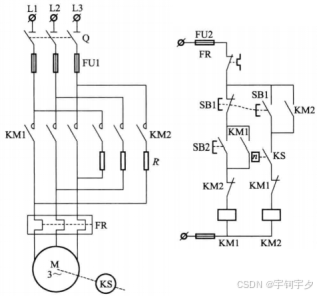
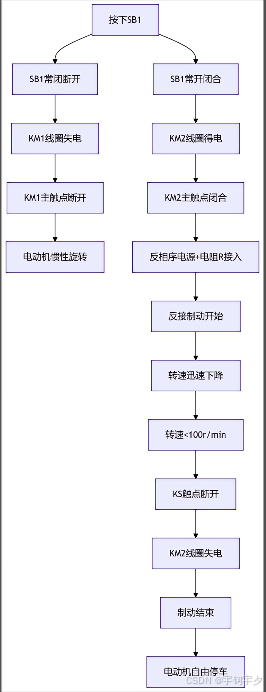
电动机单向反接制动控制电路如下图所示。图中KM1为电动机单向运行接触器,KM2 为反接制动接触器,KS 为速度继电器,R 为反接制动电阻。启动电动机时,合上电源开关,按 下 SB2,KM1 线圈通电并自锁,主触点闭合,电动机全压启动,当与电动机有机械连接的速 度继电器 KS 转速超过其动作值140r/min 时,其相应触点闭合,为反接制动作准备。停止时按下停止按钮SB1,SB1 常闭触点断开,使KM1 线圈断电释放,KM1 主触点断开,切断电动 机原相序三相交流电源,电动机仍以惯性高速旋转。当将停止按钮SB1 按到底时,其常开触点 闭合,使 KM2线圈通电并自锁,电动机定子串入三相对称电阻接入反相序三相交流电源进行 反接制动,电动机转速迅速下降。当转速下降到KS 释放转速即100r/min 时 ,KS 释 放 ,KS 常开触点复位,断开KM2 线圈电路,KM2 断电释放,主触点断开电动机反相序交流电源,反 接制动结束,电动机自然停车至零。
以下是根据您描述的电动机单向反接制动控制电路绘制的接线图及详细说明:
主电路接线图
主电路 L1──QS──FU1──┬──KM1──┬──FR──M L2──QS──FU1──┼──KM1──┼──FR──M L3──QS──FU1──┼──KM1──┼──FR──M│ │└──KM2─┴─R──┘(反相序) (制动电阻)
控制电路接线图
控制电路 L1─FU2─SB1(常闭)─┬─SB2─┬─[KM1]──┬─[KM1线圈]─┬─FR─N│ │ │ ││ └─KM2常闭─┘ ││ │├─SB1(常开)─┬─[KM2]──┬─[KM2线圈]─┘│ │ ││ └─KS常开─┘│└─KM1常闭─┘ (互锁)
速度继电器连接
M──机械连接──KS
符号说明
-
QS:电源总开关
-
FU1/FU2:主电路/控制电路熔断器
-
KM1:正向运行接触器
-
KM2:反接制动接触器
-
KS:速度继电器(常开触点)
-
SB1:停止按钮(复合按钮)
-
SB2:启动按钮(常开)
-
R:反接制动电阻
-
FR:热继电器
-
M:三相电动机
工作流程详解
-
启动过程:

-
制动过程:
关键设计特点
-
复合按钮控制:
-
SB1同时具备停止和制动触发功能
-
轻按SB1:停止运行(KM1断电)
-
按到底:触发反接制动(KM2通电)
-
-
速度检测机制:
-
KS动作值:140r/min(启动后闭合)
-
KS释放值:100r/min(制动结束断开)
-
精确控制制动时机
-
-
电气互锁保护:
-
KM1和KM2常闭触点互锁
-
防止正反转接触器同时接通
-
-
制动电阻作用:
-
限制反接制动电流
-
计算公式:R = 0.13 × U_N / I_ST
-
典型值:5-10Ω(根据电机功率)
-
-
安全防护:
-
热继电器FR提供过载保护
-
熔断器FU提供短路保护
-
失压自动保护
-
反接制动特性:
制动转矩大(可达额定转矩的2倍)
制动迅速(0.5-2秒完成制动)
能量消耗大(制动能量转化为热能)
适用于10kW以下电动机
制动精度±10r/min
注意事项
-
电阻选型:
-
功率计算:P_R = I²R × t (t为制动时间)
-
通常选用ZX1/ZX2系列铸铁电阻
-
-
速度继电器调整:
-
动作值调整范围:100-300r/min
-
释放值调整范围:50-150r/min
-
-
操作要求:
-
制动后立即松开SB1
-
避免长时间按住导致反向启动
-
频繁制动需监控电阻温度
-
此电路通过反接制动实现快速停车,特别适用于需要快速停止的小功率设备(如车床、钻床等)。制动电阻的加入有效抑制了反接时的大电流冲击,速度继电器的精确控制确保在接近停止时及时断开制动电源。