freeRTOS 消息队列之一个事件添加到消息队列超时怎么处理
一 消息队列的结构框图
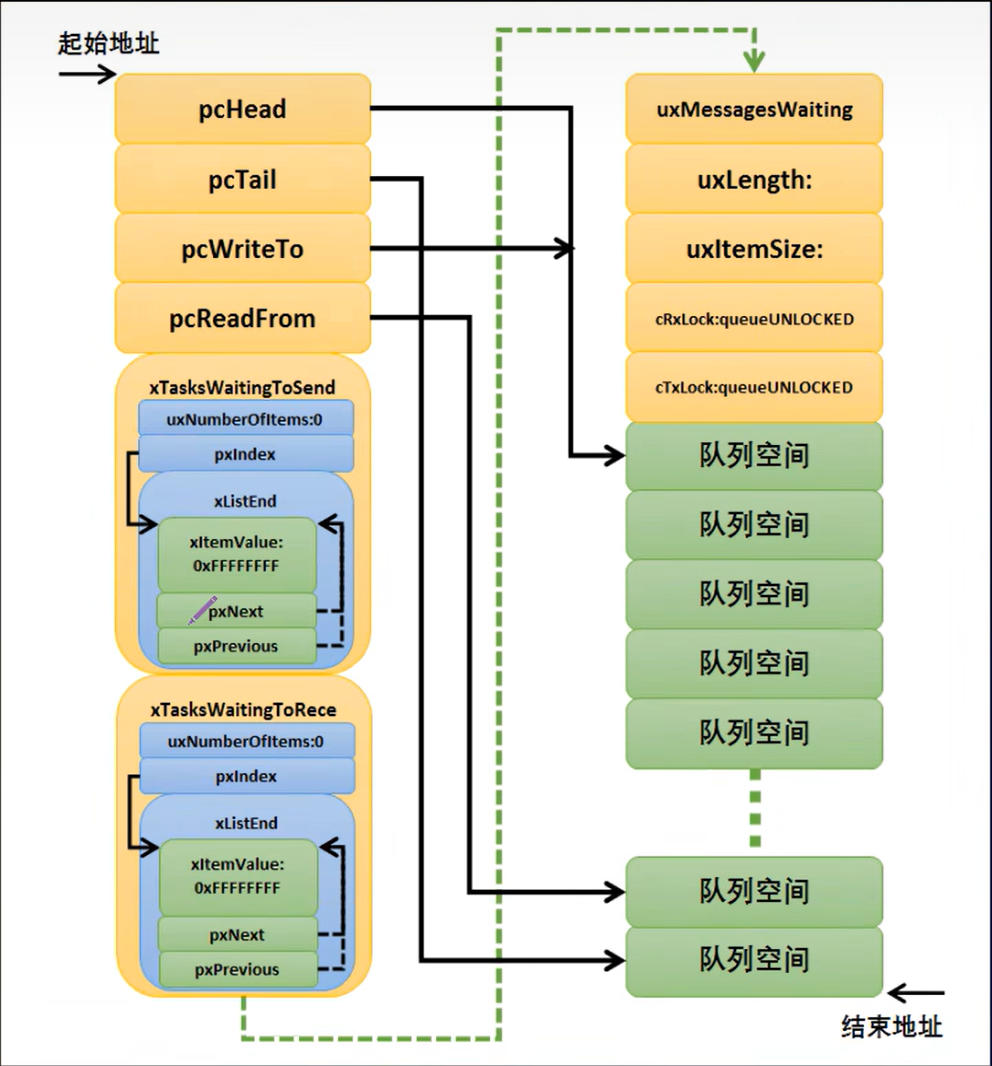
xTasksWaitingToSend:这个列表存储了所有因为队列已满而等待发送消息的任务。当任务尝试向一个已满的队列发送消息时,该任务会被挂起并加入到xTasksWaitingToSend列表中,直到队列中有空间可用,
xTasksWaitingToReceive:这个列表存储了所有因为队列为空而等待接收消息的任务。当任务尝试从一个空队列读取消息时,该任务会被挂起并加入到xTasksWaitingToReceive列表中,直到队列中有数据可用
消息队列中的消息队列数量通常由数量上限的限制,但是xTasksWaitingToSend以及xTasksWaitingToReceive这两个链表中可以加入的任务数量没有明确的上限限制。
二 freertos一个事件添加到消息队列超时怎么处理
在使用FreeRTOS时,如果你需要将一个事件添加到消息队列中,并且希望在特定时间内完成,可以通过几种方式来处理超时情况。下面是一些常用的方法:
1. 使用xQueueSend和超时参数
xQueueSend函数允许你指定一个阻塞时间(以tick为单位),如果在指定的时间内队列没有被空间,则会返回一个错误码。
#include "FreeRTOS.h"
#include "queue.h"
QueueHandle_t xQueue;
void *pvItemToQueue = NULL; // 指向你想要发送的数据的指针
TickType_t xTicksToWait = 10; // 等待时间,例如10 ticks
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
if( xQueueSend( xQueue, &pvItemToQueue, xTicksToWait ) != pdPASS )
{
// 发送失败,可能是因为超时或队列已满
}
2. 使用xQueueSendToBack或xQueueSendToFront和超时参数
这两个函数与xQueueSend类似,但是它们提供了更多的灵活性,例如你可以选择将数据添加到队列的前面或后面。
if( xQueueSendToBack( xQueue, &pvItemToQueue, xTicksToWait ) != pdPASS )
{
// 发送失败,可能是因为超时或队列已满
}
3. 使用xQueueSendToFrontFromISR和超时参数(中断服务例程中使用)
如果你在中断服务例程(ISR)中需要发送消息,可以使用xQueueSendToFrontFromISR,同样可以指定超时。
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
if( xQueueSendToFrontFromISR( xQueue, &pvItemToQueue, &xHigherPriorityTaskWoken ) != pdTRUE )
{
// 发送失败,可能是因为队列已满
}
if( xHigherPriorityTaskWoken != pdFALSE )
{
// 可能需要从ISR唤醒更高优先级任务
portYIELD_FROM_ISR(); // 或者相应的端口特定的唤醒调用
}
4. 处理超时后的逻辑
无论哪种方式,处理超时后的逻辑都是非常重要的。例如,你可能需要重新尝试发送消息,或者执行一些错误处理操作。例如:
if( xQueueSend( xQueue, &pvItemToQueue, xTicksToWait ) != pdPASS )
{
// 超时处理逻辑,例如重新尝试或者记录错误等
// 可以选择在一定次数后停止尝试,避免无限重试导致的资源耗尽问题。
}
5. 使用xQueueOverwrite(如果适用)
如果你只是想覆盖队列中的现有数据而不是添加新数据(这在某些特定情况下很有用),可以使用xQueueOverwrite,它不涉及超时问题。
if( xQueueOverwrite( xQueue, &pvItemToQueue ) != pdPASS )
{
// 覆盖失败,可能是因为队列中没有数据可以被覆盖。
}
结论
通过上述方法,你可以有效地处理在使用FreeRTOS时向消息队列发送消息的超时情况。选择合适的方法取决于你的具体需求和场景。