通信与推理的协同冲突与架构解耦路径
在大规模无人机集群中,AI决策系统依赖实时通信完成状态共享与策略传播,但通信带宽、延迟、信息一致性等问题正在成为系统性能的瓶颈。尤其是在山区、城市低空或信号遮蔽等通信不稳定区域,AI推理系统往往面临状态更新延迟,难以及时响应动态环境变化,极易出现“时序错位”或“认知失配”现象,最终导致飞行路径判断失误或决策滞后。本文将从推理频率、信息更新路径、协同一致性建模等角度切入,提出“代表推理+延迟容忍+本地冗余感知”的解耦策略,并结合睿途架构提出软硬件协同实现路径。
一、通信延迟对AI推理系统的冲击
1.1 推理触发高度依赖状态同步,延迟将导致“逻辑超前或滞后”。
例如在高楼林立的城市环境中,建筑物可能导致无线信号严重遮蔽,使得飞行编队中的边缘无人机未能及时获取状态更新,从而在本地推理时仍基于过时态势判断,导致飞行路径冲突或能量分配失衡。
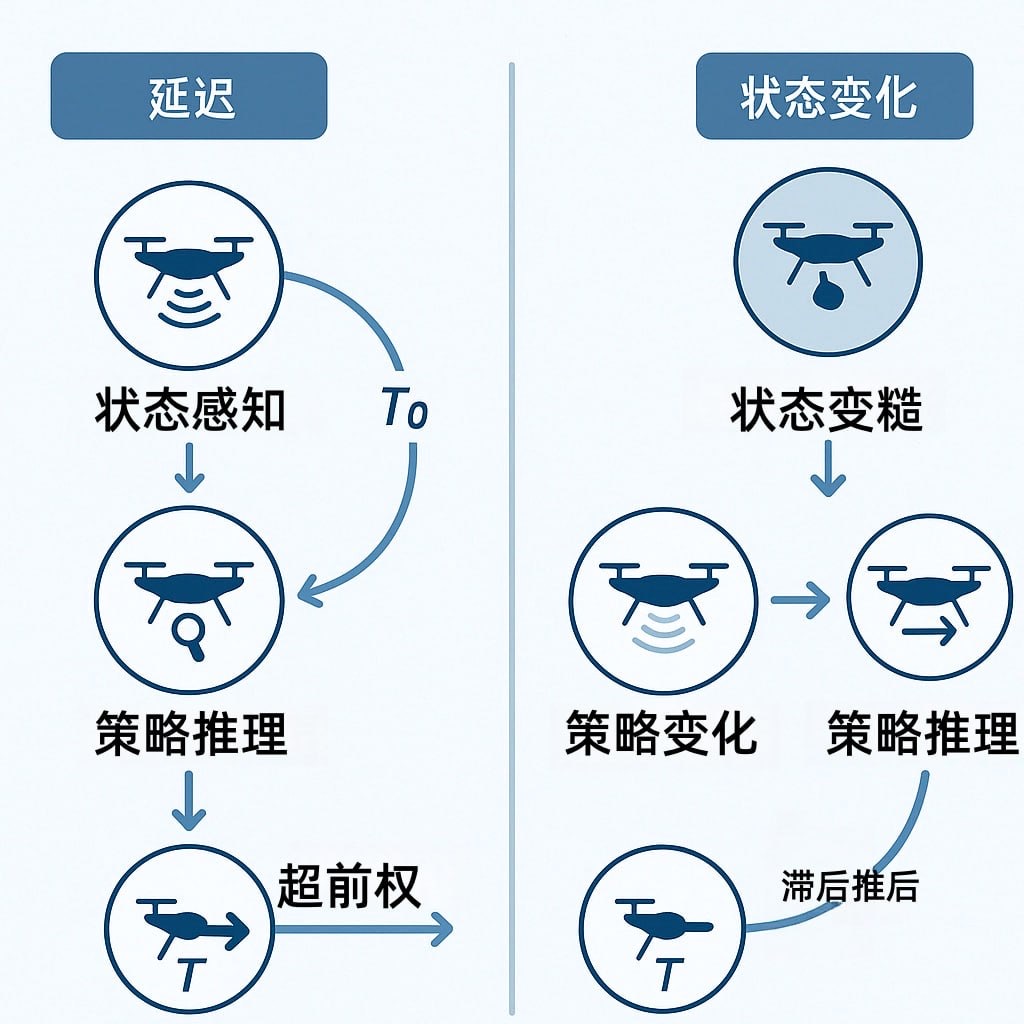
1.2 异步通信下的协同失衡问题:策略响应对不上环境状态
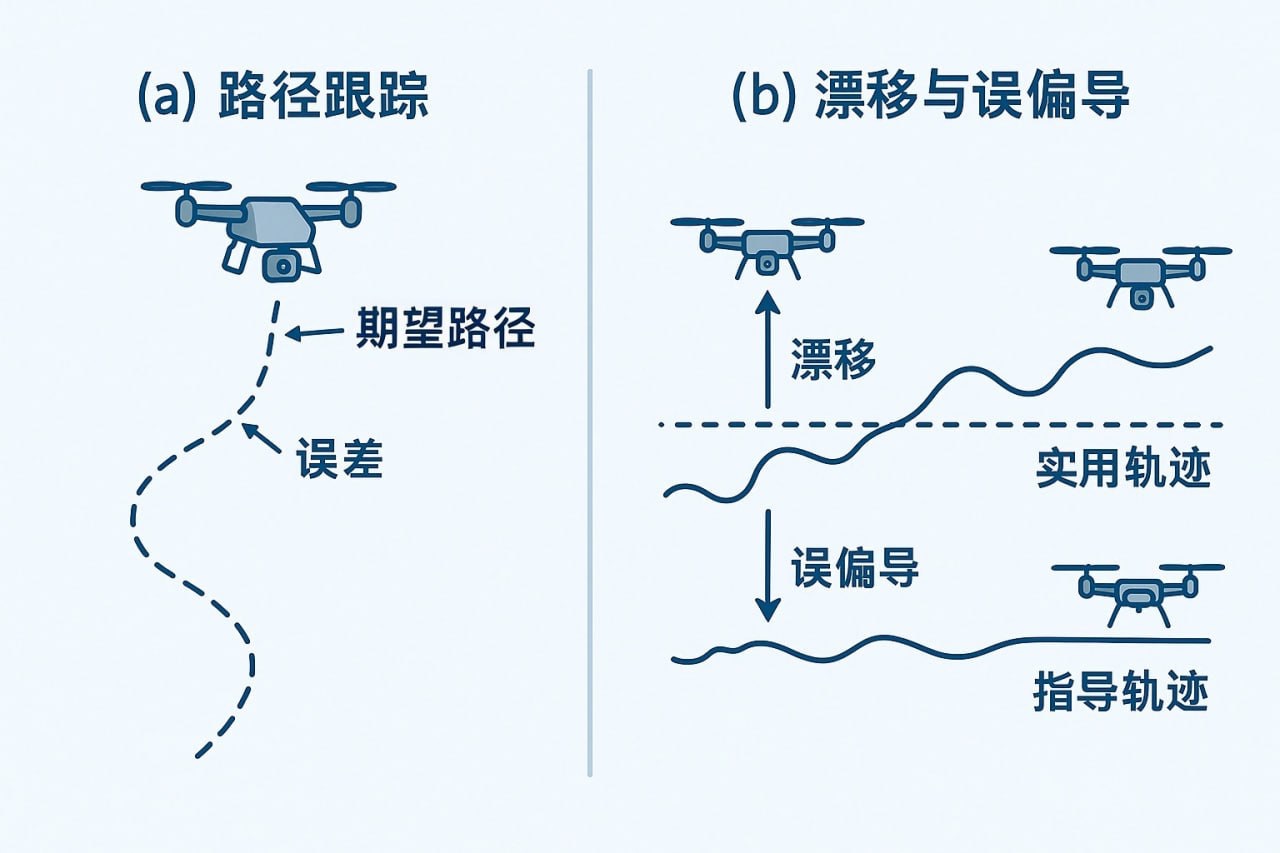
1.3 案例分析:以城市多任务并发飞行场景为例,若无人机在建筑物遮挡区域失去同步数据,其原定航线可能因缺乏上下文信息而误入邻近编队航段,产生信息漂移与误偏导,最终影响整体任务协同效率。
二、多跳信道的衰减与预测不一致问题
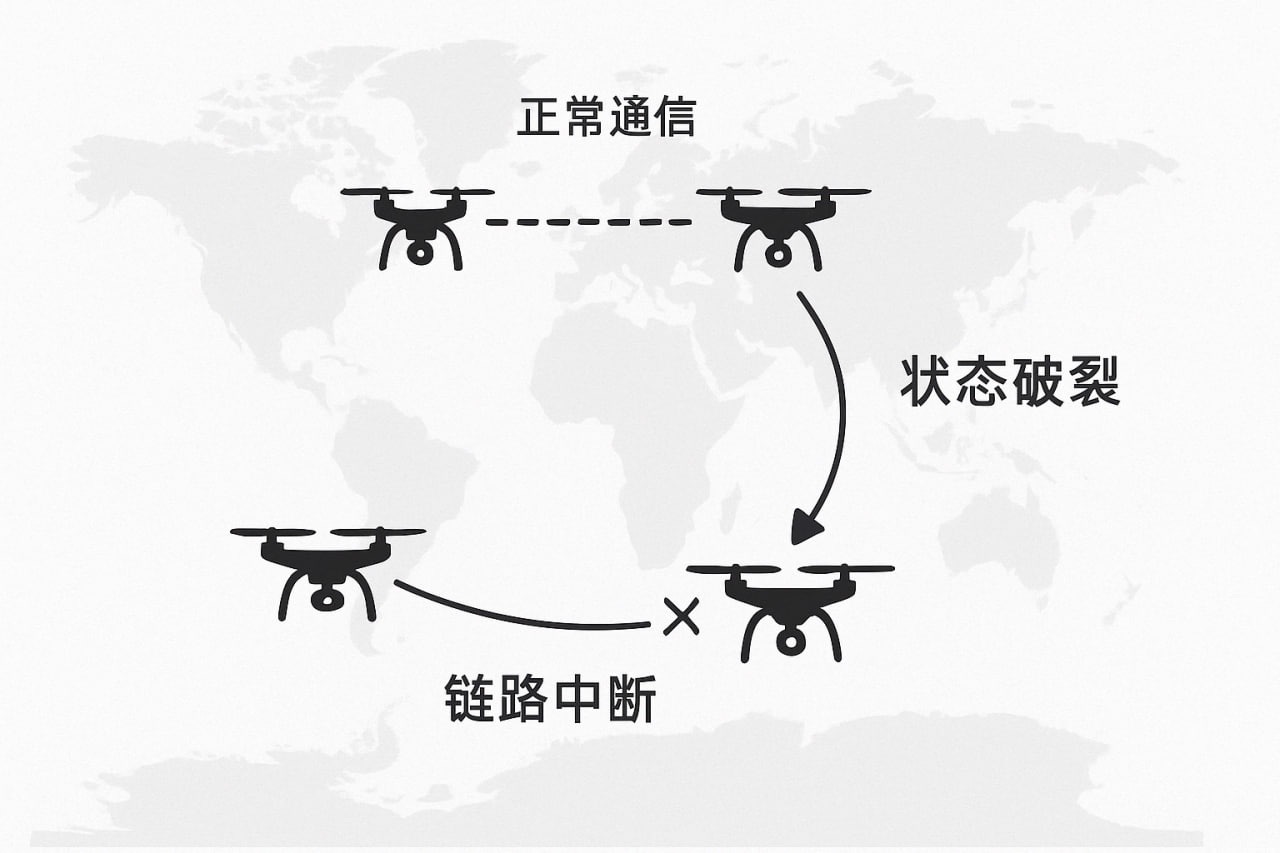
2.1 多跳通信链中,时间窗传播造成“状态快照破裂”
2.2 在状态未完整同步前触发决策,产生“预测伪协同”。
这种伪协同常导致决策层出现路径偏差、局部拥堵或资源冗余。例如两架飞行器因未获得彼此最新状态而同时选择同一航段,形成无意识的重复路径飞行,浪费电量并可能引发空中冲突。
2.3 可解方案:建议采用基于拓扑结构的多层状态缓冲机制,将临近节点视图分级缓存,避免决策依据断裂。同时,引入局部平均共识算法(如一致性估计或博弈式聚合),提升在通信不完全条件下的集群协同稳定性。
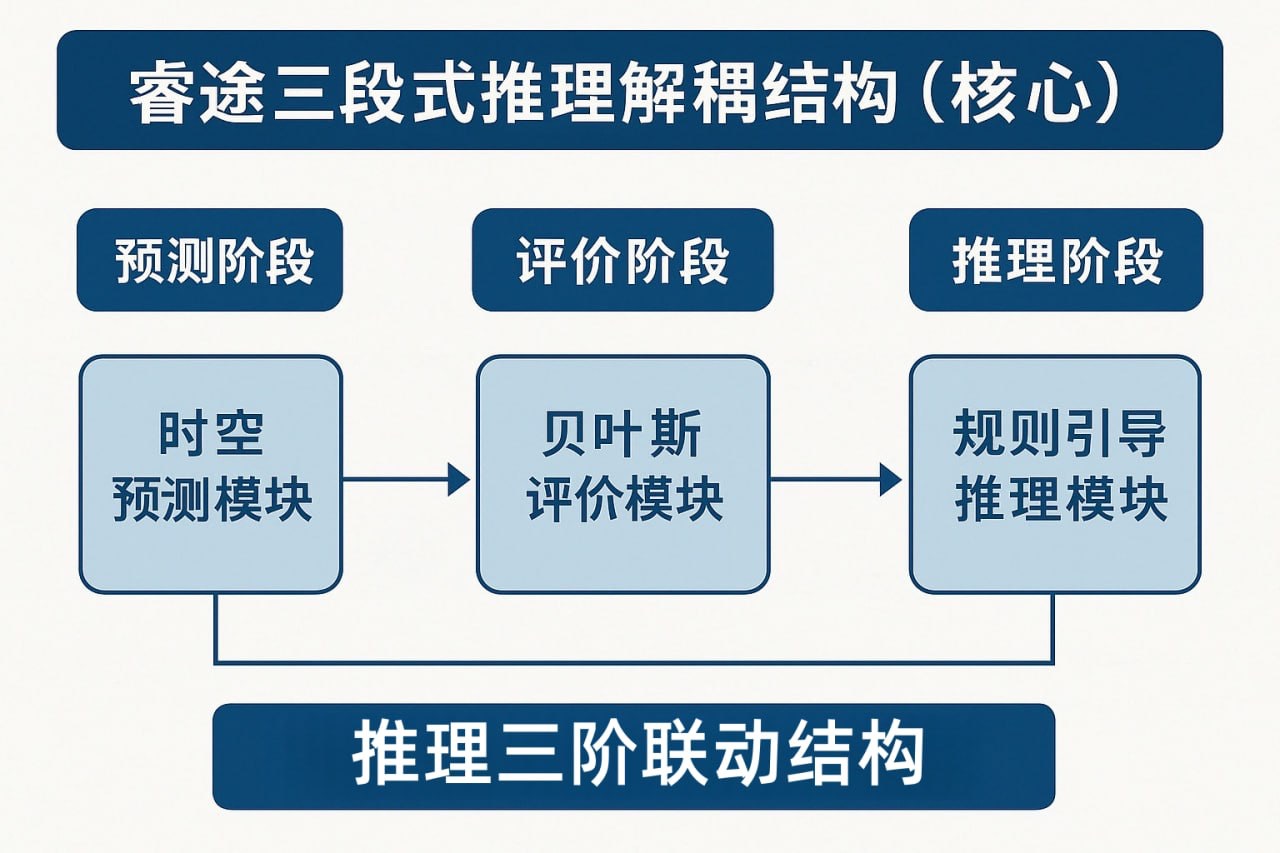
三、睿途提出的解耦式推理框架
3.1 决策代表机制:
- 指定一至两台核心无人机承担实时推理,其他飞行器转为“反应执行器”
- 减少系统级决策密度,提升通信冗余容错率
3.2 延迟容忍式推理结构:
- 引入推理“窗口期”,系统在T±Δt内都视为合法响应范围
- 模型回退机制:若超时则选择上一次稳定策略进行中继决策
3.3 本地冗余感知增强机制:
降低对通信的强依赖,使用IMU+图像+雷达等本地传感融合构建即时局部视角,确保飞行器即使断链也具备最低限度态势判断能力。
进一步可采用扩展卡尔曼滤波(EKF)对非线性状态进行滤波融合,或运用图神经网络(GNN)对飞行器之间的空间关系进行建模,以提升局部环境建模的准确性与时效性。
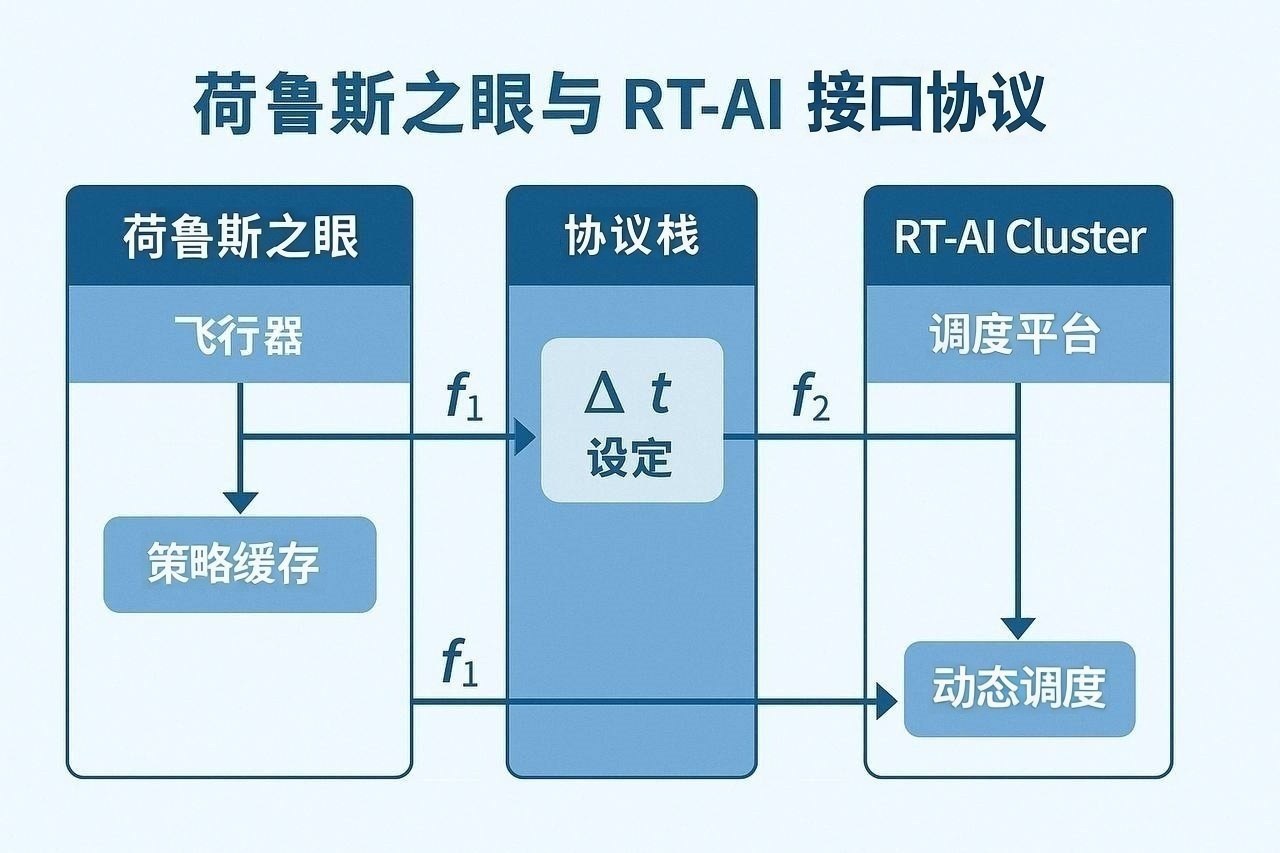
四、荷鲁斯之眼+RT-AI的协同接口实践
4.1 荷鲁斯之眼飞控芯片端集成“容错推理执行器”,具备策略缓存/延迟恢复能力
4.2 RT-AI Cluster端具备“代表机指令过滤+共识映射”功能模块
4.3 二者通过协议解耦:推理频率可调,传感数据可抽稀,任务响应带宽自适应。
整体流程如图所示:
→ 荷鲁斯之眼芯片侧设定本地决策频率(f1)
→ RT-AI Cluster基于任务负载与空域动态调度频率(f2)
→ 协议栈中设定最大响应窗口Δt,保证异步协同仍可融合行为目标。
结语
通信不是理想系统的“理所当然”,而是复杂任务体系下最不可控的核心变量。
通过代表推理机制、窗口容忍策略和本地增强感知手段,睿途为低空大编队AI系统提供了稳定运行的关键支撑路径。
未来,随着城市低空空域的密度提升与任务类型的多元化,空中交通系统对通信-感知-调度的三维融合能力提出更高要求。睿途所探索的“通信容错+推理代理+多源感知”的智能编队模型,正逐步构建下一代城市空域协同控制系统的工程原型与行业范式。
