哈希:闭散列的开放定址法
我还是曾经的那个少年
1.概念
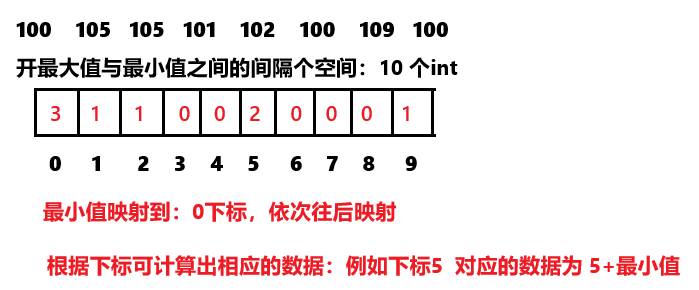
通过其要存储的值与存储的位置建立映射关系。
如:基数排序也是运用了哈希开放定址法的的思想。
弊端:仅适用于数据集中的情况
2.开放定址法
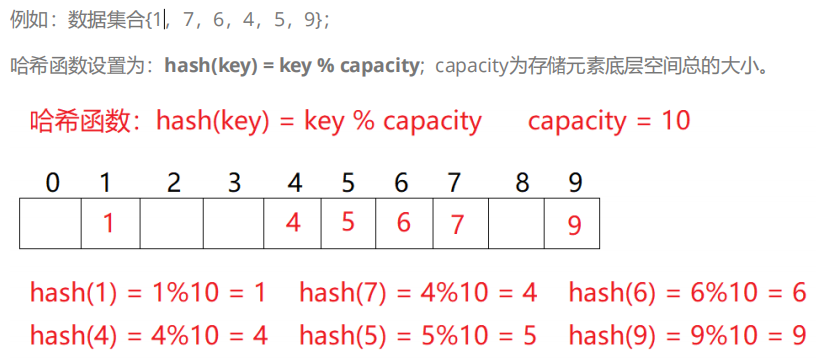
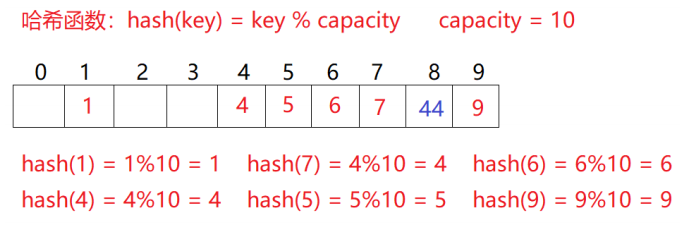
问题:按照上述哈希的方式,向集合插入数据为44,会出现什么问题呢?
哈希冲突。
即:不同关键字通过相同的哈希方式计算出相同的哈希地址,该种现象称为哈希冲突或哈希碰撞。
3.哈希冲突的解决方式
闭散列和开散列。(这次主要讲闭散列)
3.1闭散列
闭散列:也叫开放定址法,当发生哈希冲突时,如果哈希表未被装满,说明在哈希表中必然还有空位置,那么可以把key存放到冲突位置中的“下一个” 空位置中去。那如何寻找下一个空位置呢?
1.线性探测
比如上面的场景中,现在需要插入元素44,先通过哈希函数计算哈希地址,hashAddr为4,因此44理论上应该插在该位置,但是该位置已经放了值为4的元素,即发生哈希冲突。
线性探测:从发生冲突的位置开始,依次向后探测,直到寻找到下一个空位置为止 。
- 插入
- 通过哈希函数获取待插入元素在哈希表中的位置
- 如果该位置中没有元素则直接插入新元素,如果该位置中有元素发生哈希冲突, 使用线性探测找到下一个空位置,插入新元素。
- 删除
采用闭散列处理哈希冲突时,不能随便物理删除哈希表中已有的元素,若直接删除元素会影
响其他元素的搜索。比如删除元素4,如果直接删除掉,44查找起来可能会受影响。
因此线性探测采用标记的伪删除法来删除一个元素。
通过添加枚举常量,来标记相应位置上是否存在或为空等状态。
enum STASTE
{EXIST,EMPTY,DELETE
};
template<class K, class V>
struct HashData
{pair<K, V> _kv;STASTE _state = EMPTY;
};线性探测:找到空(状态为:EMPTY),没找到才返回

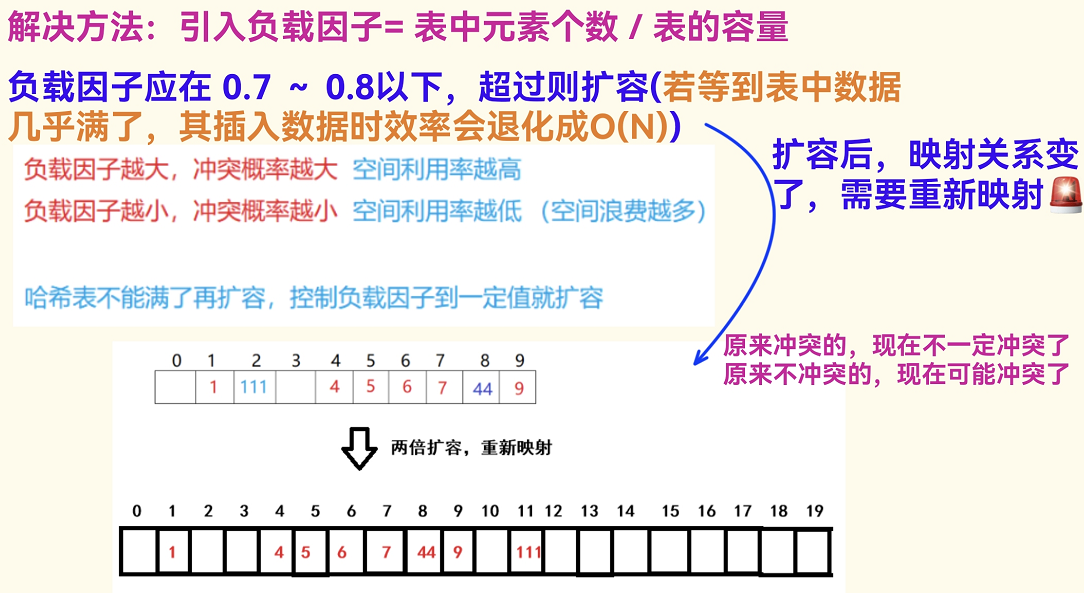
3.1.1扩容问题
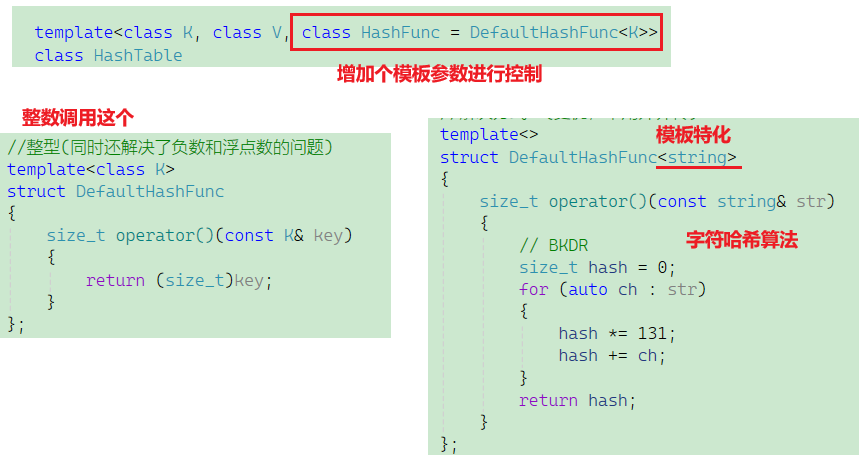
4.插入的key值为字符串
我们需要将该字符串转换成相应的整数再进行映射。字符哈希算法。
5.模拟实现
//整型(同时还解决了负数和浮点数的问题)
template<class K>
struct DefaultHashFunc
{size_t operator()(const K& key){return (size_t)key;}
};//模板特化
template<>
struct DefaultHashFunc<string>
{size_t operator()(const string& str){// BKDRsize_t hash = 0;for (auto ch : str){hash *= 131;hash += ch;}return hash;}
};
namespace open_address
{enum STASTE{EXIST,EMPTY,DELETE};template<class K, class V>struct HashData{pair<K, V> _kv;STASTE _state = EMPTY;};template<class K, class V, class HashFunc = DefaultHashFunc<K>>class HashTable{public:HashTable(){_table.resize(10);}bool insert(const pair<K, V>& kv){//是否存在if (find(kv.first))return false;//扩容if (_n * 10 / _table.capacity() >= 7){//类似现代写法HashTable<K, V, HashFunc> tmp;tmp.getTable().resize(_table.capacity() * 2);//遍历旧数据,重新映射到新空间for (size_t i = 0; i < _table.size(); i++){if (_table[i]._state == EXIST)tmp.insert(_table[i]._kv);}_table.swap(tmp.getTable());}//线性探索HashFunc hf;size_t hashi = hf(kv.first) % _table.size();while (_table[hashi]._state == EXIST){++hashi;hashi %= _table.size();}_table[hashi]._kv = kv;_table[hashi]._state = EXIST;++_n;return true;}HashData<const K, V>* find(const K& key){HashFunc hf;//先找到相应的映射位置,是则返回,否则继续往后查找到空为止size_t hashi = hf(key) % _table.size();while (_table[hashi]._state != EMPTY){if (hf(_table[hashi]._kv.first) == hf(key))return (HashData<const K, V>*) & _table[hashi];++hashi;hashi %= _table.size();}return nullptr;}bool erase(const K& key){HashData<const K, V>* ret = find(key);if (ret == nullptr || ret->_state == DELETE)return false;ret->_state = DELETE;--_n;return true;}vector<HashData<K, V>>& getTable(){return _table;}private:vector<HashData<K, V>> _table;size_t _n = 0; //记录存储有效数据个数};
}感觉不错的可以点赞+收藏咯!!
谢谢大家