BEVDepth- Acquisition of Reliable Depth for Multi-view 3D Object Detection
中科院 旷视 AAAI 2023
纯视觉多相机BEV方案检测模型
code:https://github.com/Megvii-BaseDetection/BEVDepth
paper:BEVDepth: Acquisition of Reliable Depth for Multi-View 3D Object Detection| Proceedings of the AAAI Conference on Artificial Intelligence
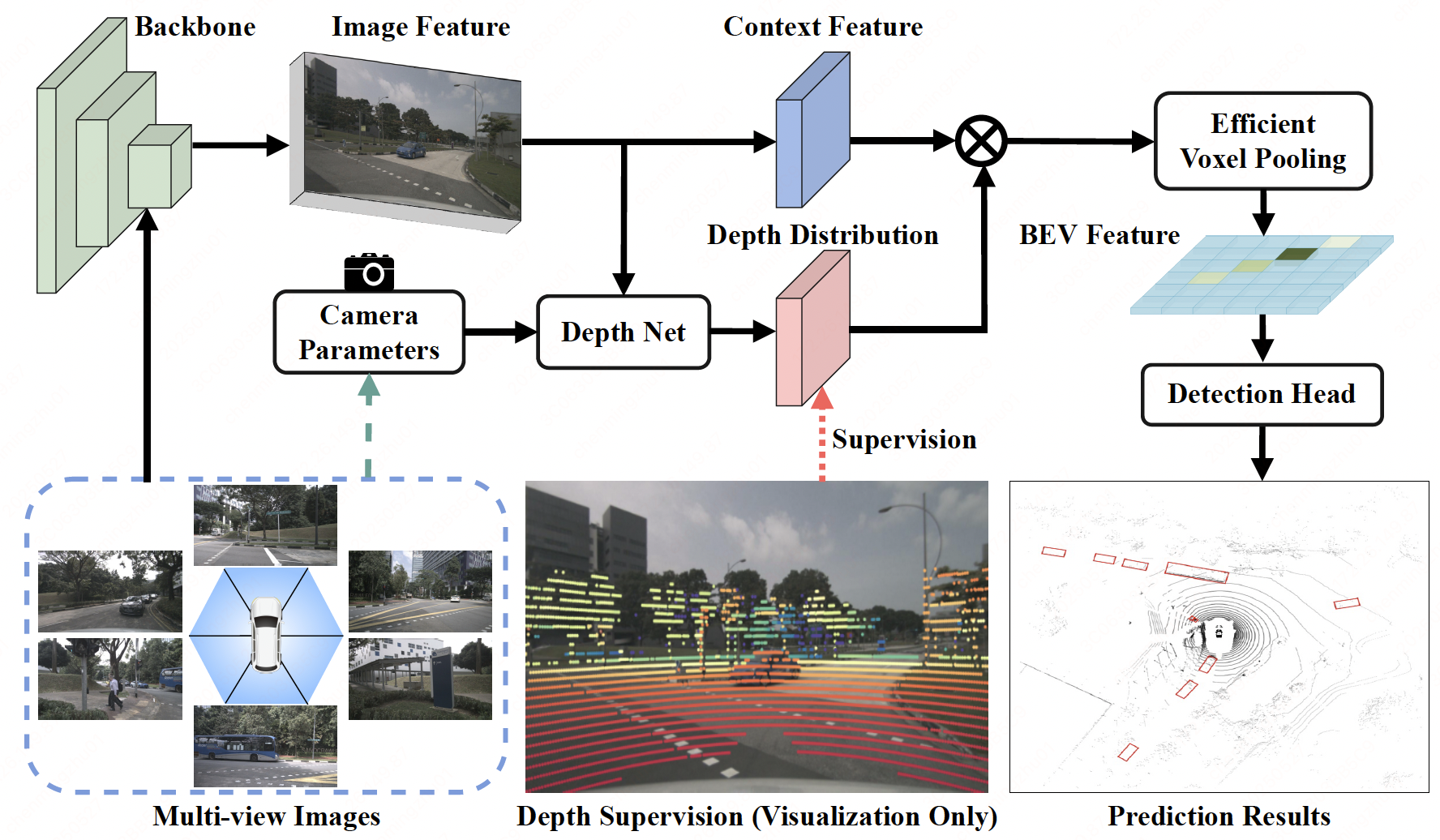
输入:N帧环视相机
过程:
- CNN抽2D图像特征
- DepthNet从2D特征建模深度
- 点云+相机内外参计算图像深度信息(2.5D图像)

- min pooling+one hot,计算深度真值

- depth网络里加残差、deformable conv扩大感受野,抵消相机外参变化带来的影响(?)
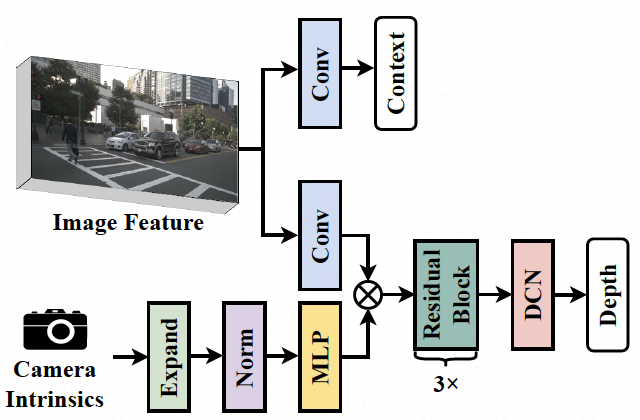
- camera-awareness DepthNet
- 目的:提升深度分类效果
- 方案:相机内参作为DepthNet网络输入
- MLP层:expand内参到特征同维数
- SE层:融合2D特征+相机内外参
- 提效voxel pooling
- 方案:自定义cuda算子VoxelPoolingTrain
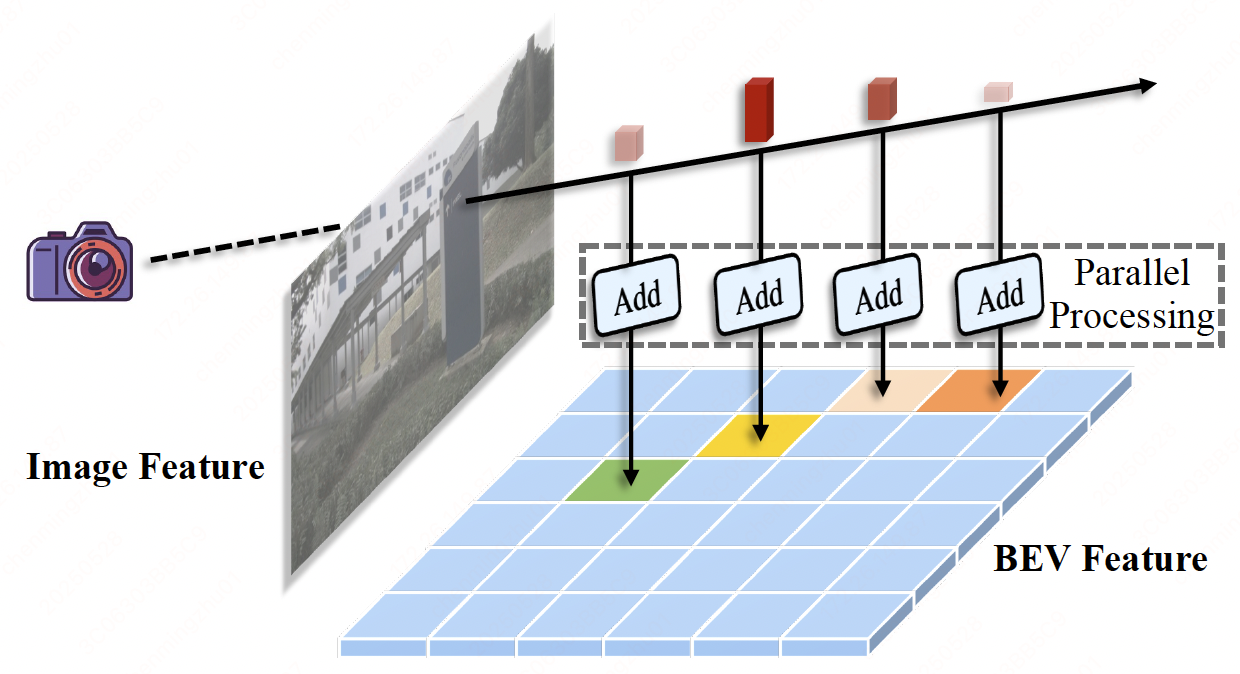

- 方案:自定义cuda算子VoxelPoolingTrain
- 点云+相机内外参计算图像深度信息(2.5D图像)
- view transformer用2D图像特征+深度获取3D特征,再投射成bev表征
- CenterPoint 3D检测头识别检测框(class,3Dbox offset,属性等)