Deep Evidential Regression
摘要
翻译:
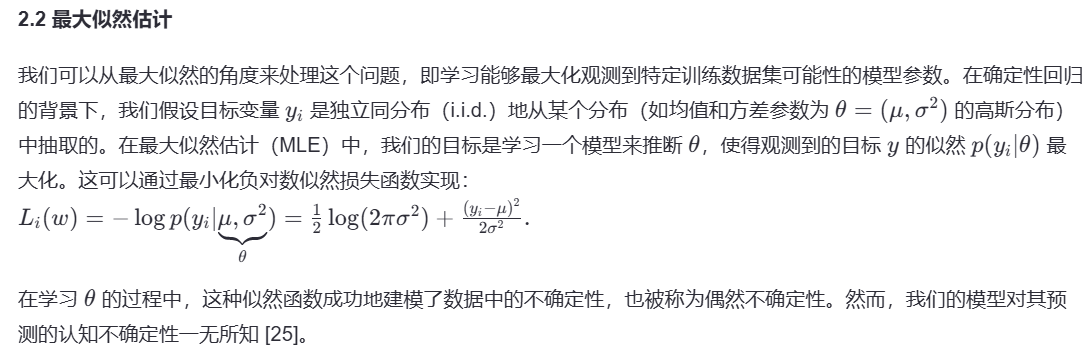
确定性神经网络(NNs)正日益部署在安全关键领域,其中校准良好、鲁棒且高效的不确定性度量至关重要。本文提出一种新颖方法,用于训练非贝叶斯神经网络以同时估计连续目标值及其关联证据,从而学习偶然和认知不确定性。我们通过在原高斯似然函数上放置证据先验,并训练神经网络推断证据分布的参数来实现这一目标。此外,我们在训练中施加先验约束,当预测证据与正确输出未对齐时对模型进行正则化。该方法不依赖推理期间的采样,也无需使用分布外(OOD)样本进行训练,从而实现高效且可扩展的不确定性学习。我们在多个基准测试中展示了良好校准的不确定性度量,可扩展至复杂计算机视觉任务,并对抗性样本和OOD测试样本具有鲁棒性。
| 研究背景 | 安全关键领域需要确定性神经网络的可靠不确定性度量 |
|---|---|
| 创新方法 | 1. 使用证据先验替代传统高斯似然、2. 网络直接输出证据分布超参数 |
| 技术突破 | 同时建模: 偶然不确定性(数据噪声) 认知不确定性(模型置信度) |
| 训练机制 | 引入证据对齐的正则化项,惩罚预测证据与真实输出的偏差 |
| 效率优势 | 无需: 推理时采样、 OOD训练数据 |
| 验证效果在以下场景有效 | 标准基准测试、 复杂CV任务、 对抗/OOD样本 |
传统模式

class GaussianNN(nn.Module):def __init__(self, input_dim):super().__init__()self.fc = nn.Linear(input_dim, 2) # 输出mu和log_sigmadef forward(self, x):output = self.fc(x)mu = output[:, 0] # 均值预测log_sigma = output[:, 1] # 对数方差(数值稳定)sigma = torch.exp(log_sigma)return mu, sigmadef train_step(x, y_true):mu, sigma = model(x)loss = 0.5 * (torch.log(sigma**2) + (y_true - mu)**2 / sigma**2)loss.mean().backward()
案例
1.引言
翻译
基于回归的神经网络(NNs)正被应用于计算机视觉[15]、机器人与控制[1,6]等安全关键领域,在这些领域中,推断模型不确定性的能力对于最终的大规模应用至关重要。此外,精确且校准良好的不确定性估计有助于解释置信度、捕捉分布外(OOD)测试样本的领域偏移,并识别模型可能失败的情况。
神经网络的不确定性可以分为两个方面进行建模:(1) 数据中的不确定性,称为偶然不确定性(aleatoric uncertainty);(2) 预测中的不确定性,称为认知不确定性(epistemic uncertainty)。虽然偶然不确定性可以通过数据直接学习,但认知不确定性的估计方法也有多种,例如贝叶斯神经网络(Bayesian NNs),它在网络权重上设置概率先验,并通过采样来近似输出方差[25]。然而,贝叶斯神经网络面临一些限制,包括在给定数据的情况下难以直接推断权重的后验分布、推理过程中需要采样带来的计算开销,以及如何选择权重先验的问题。
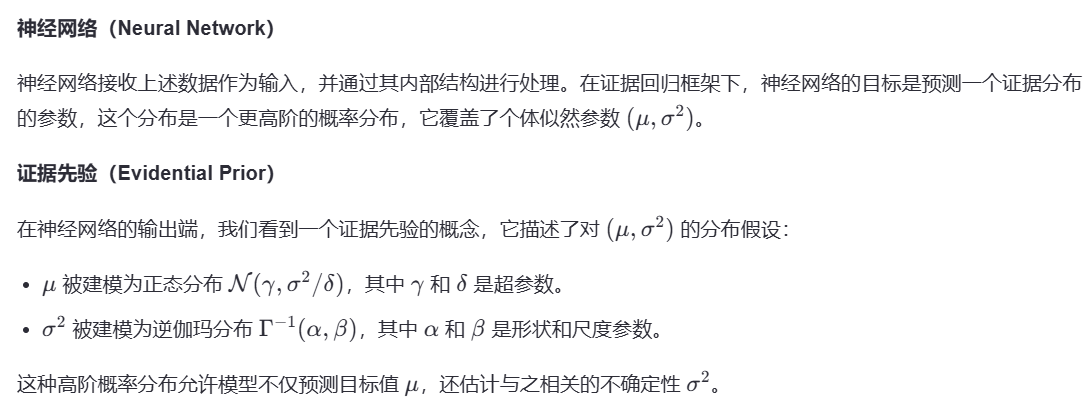
相比之下,证据深度学习(Evidential Deep Learning)将学习过程形式化为一个证据获取过程[42,32]。每个训练样本都为一个学习到的高阶证据分布提供支持。从该分布中采样可得到低阶似然函数的实例,而数据正是从中生成的。不同于贝叶斯神经网络在网络权重上设置先验,证据方法直接对似然函数设置先验。通过训练神经网络输出高阶证据分布的超参数,可以在无需采样的情况下,学习到有依据的认知和偶然不确定性的表示。
迄今为止,证据深度学习主要面向离散分类问题[42,32,22],并且通常需要定义明确的距离度量以连接最大不确定性的先验[42],或依赖于使用OOD数据进行训练以提升模型不确定性[32,31]。相比之下,连续回归问题缺乏明确定义的距离度量来正则化所推断的证据分布。此外,在大多数应用场景中预先定义合理的OOD数据集并不容易;因此,亟需仅从分布内训练集中获得对OOD数据具有校准良好不确定性的方法。
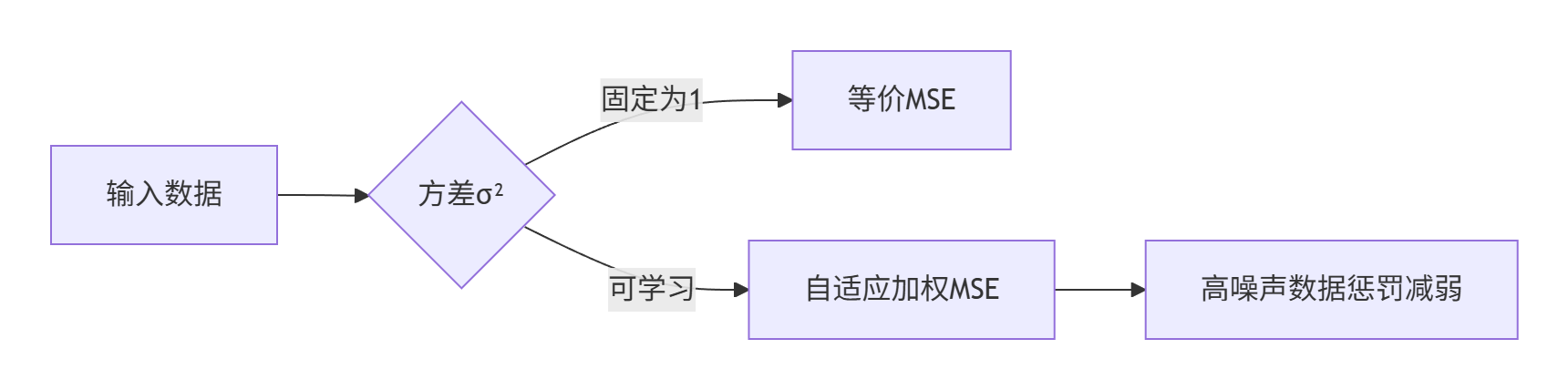
我们提出了一种新的方法,通过学习证据分布来建模回归网络的不确定性(如图1所示)。具体而言,本文做出了以下贡献:
- 提出了一种新颖且可扩展的方法,用于在回归问题中学习认知和偶然不确定性,无需在推理或训练过程中进行采样;
- 提出了适用于连续回归问题的证据正则化方法,用于惩罚误差和OOD示例上的错误证据;
- 在基准和复杂的视觉回归任务上评估了认知不确定性,并与当前最先进的神经网络不确定性估计技术进行了比较;
- 在OOD和对抗性扰动的测试输入数据上评估了鲁棒性和校准性能。
传统神经网络vs贝叶斯神经网络
贝叶斯神经网络就像个"会承认自己会犯错"的学霸
| 传统神经网络(普通学霸) | 贝叶斯神经网络(谦虚学霸) |
|---|---|
| 特点:每次考试都斩钉截铁给答案 | 特点:会给答案范围 |
| “这道题答案绝对是3.14!” | “答案可能是3.1到3.2之间,我有80%把握” |
| 实际可能是3.12,但从不告诉你它有多确定 | 同时告诉你答案和可信度 |
工作原理类比
步骤1:考前划重点(先验)
老师说:“考试重点在1-3章”(这就是先验知识)
普通学霸:只背这3章,其他完全不看
贝叶斯学霸:重点看1-3章,但也会瞄一眼其他章节
步骤2:考试答题(训练)
发现第4章也考了
贝叶斯学霸:
“看来不能全信老师,要调整复习策略”
→ 更新知识分布(计算后验)
步骤3:回答不确定的题(预测)
遇到超纲题时:
普通学霸:硬着头皮蒙一个答案
贝叶斯学霸:
“这题我没把握,答案可能在A到D之间”
→ 通过多次思考(采样)给出概率范围
4. 为什么需要多次"思考"?
贝叶斯学霸会这样做:
第一次想:可能是B
第二次想:也可能是C
…
综合100次思考结果:
60%概率是B
30%概率是C
10%概率是其他
最终答案:最可能是B,但有不确定性(方差)
贝叶斯实际应用例子
医疗诊断场景:
普通AI:
“患者有80%概率患癌”(医生可能过度治疗)
贝叶斯AI:
“患癌概率60%-85%,因为模型没见过类似病例”
→ 提醒医生需要进一步检查
贝叶斯关键优势
知道什么时候不确定:遇到没见过的题型会明说
能利用经验:把老师划重点的知识融入判断
避免过度自信:不会对蒙的答案打包票
本文


2. 从数据中建模不确定性
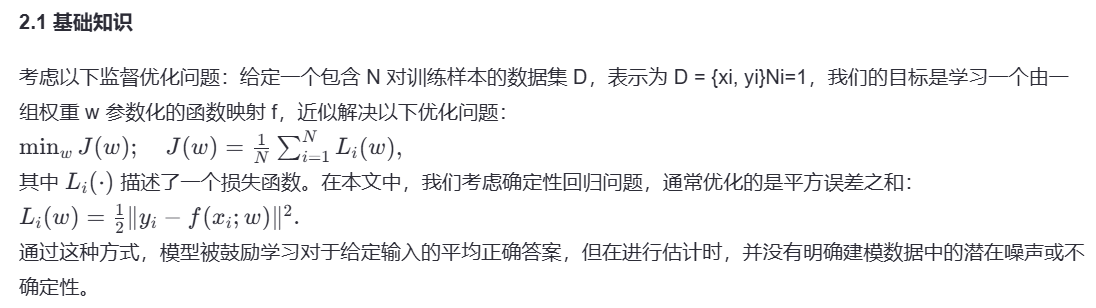
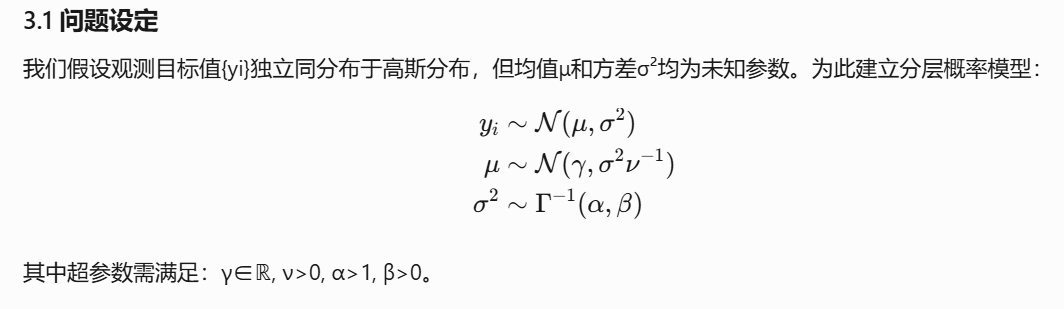
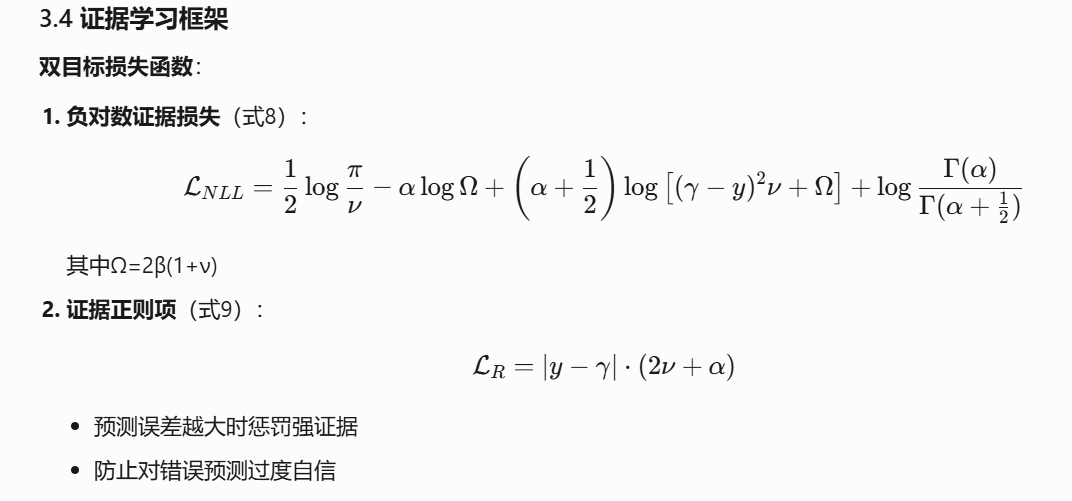
3. 回归中的证据不确定性
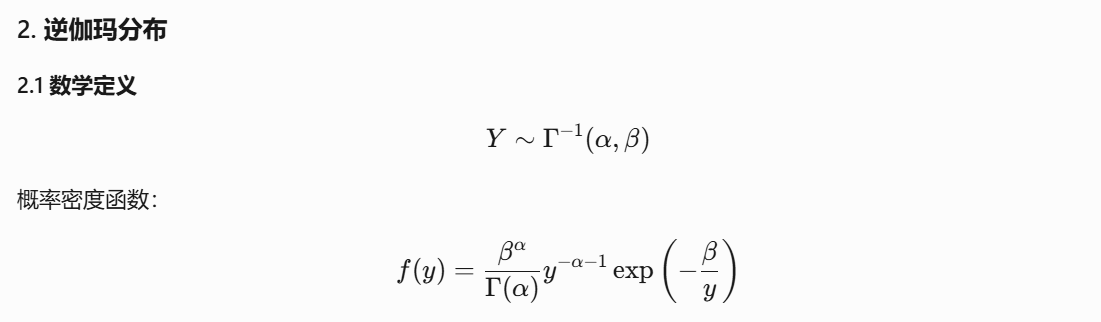
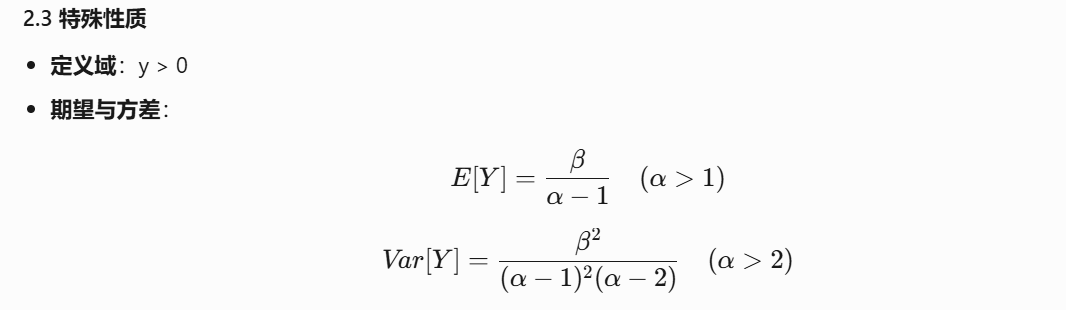
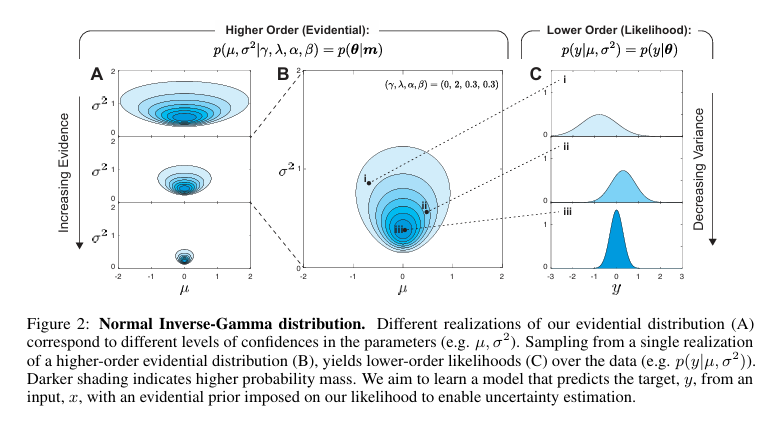
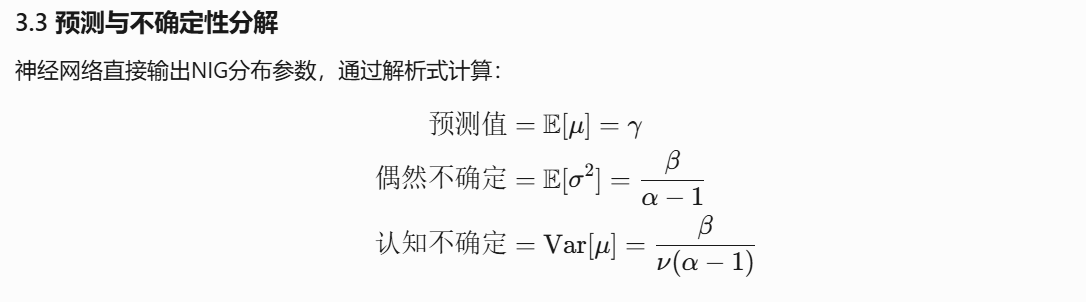
NIG分布是高斯分布与逆伽玛分布的联合分布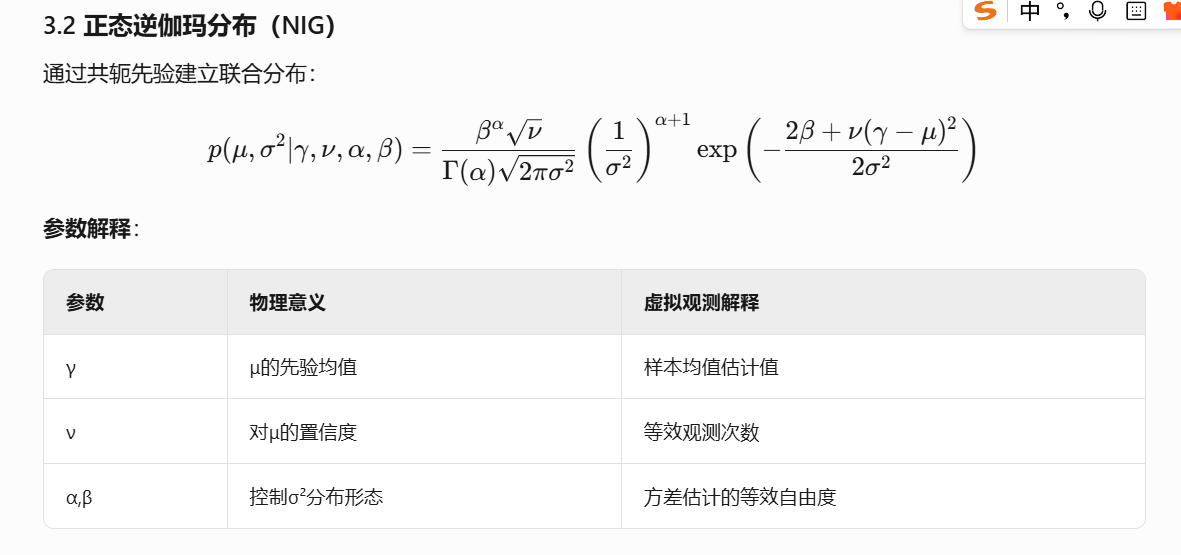

在这里插入代码片
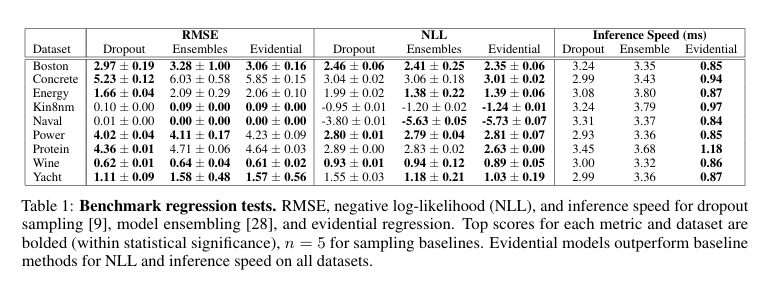
4.实验


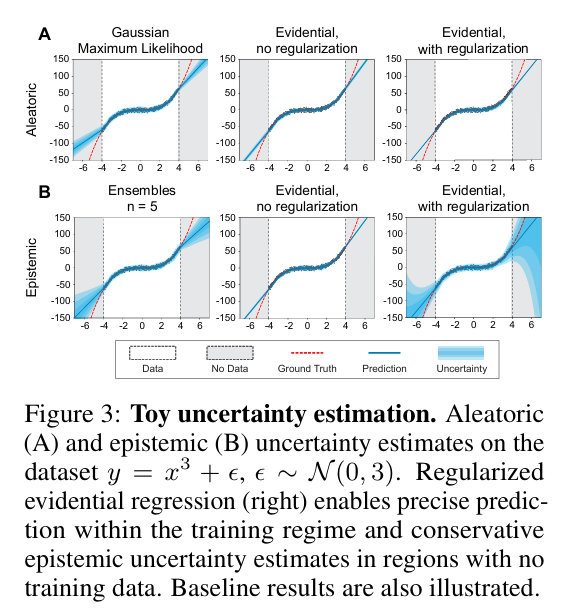
下面展示了这几种关系图
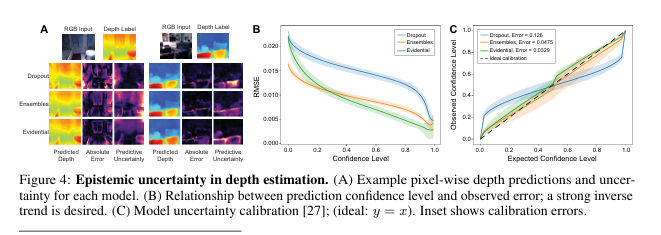
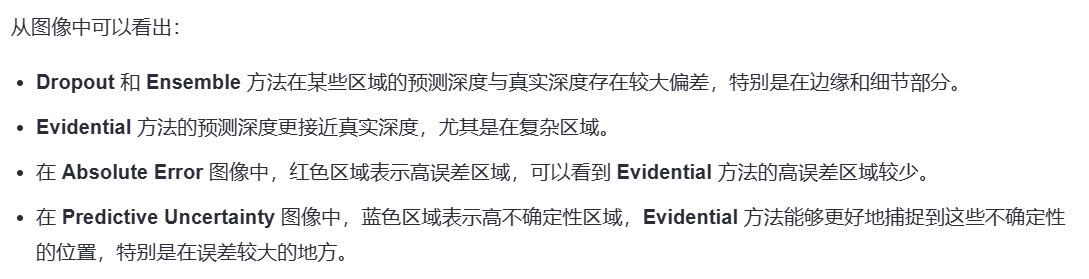
示例像素级深度预测及其不确定性
图像集展示了不同模型(如Dropout、Ensemble和Evidential)在处理同一场景时的表现。每种模型对应的展示包括:原始RGB图像、该场景的真实深度图、模型预测出的深度图、模型预测误差的绝对值图以及模型估计的不确定性图。
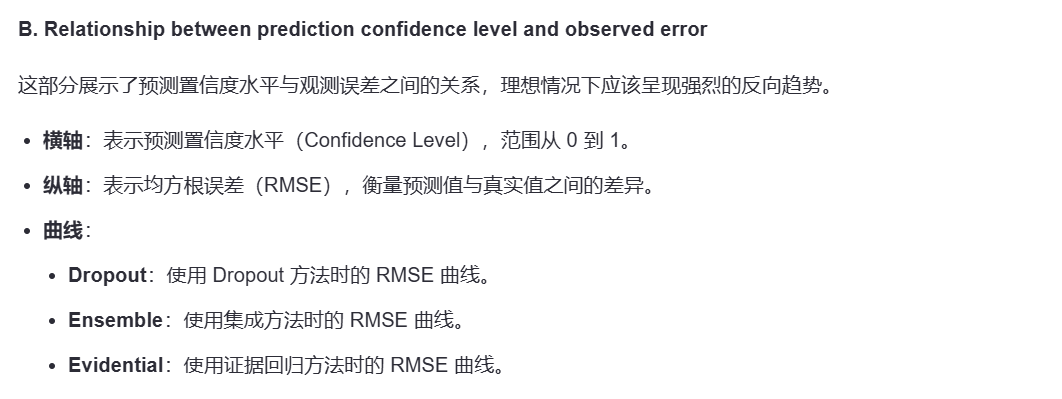
预测置信度水平与观测误差的关系
对比了不同方法(同样包括Dropout、Ensemble和Evidential)在不同的预测置信度水平下的均方根误差(RMSE)。通过这些曲线,可以直观地看出随着置信度的提高,各个模型的误差变化趋势,进而评估它们在不同置信度水平上的性能。
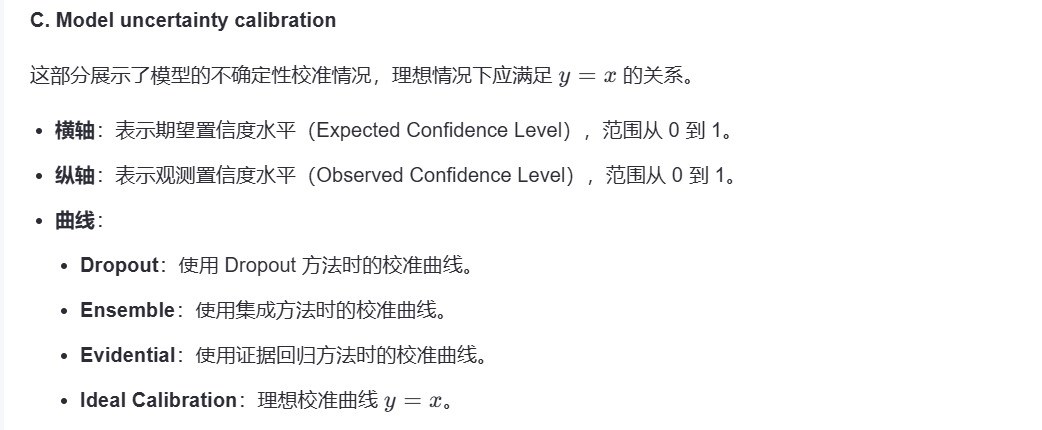
模型不确定性的校准情况
校准图表描绘了模型期望置信度水平与实际观测到的置信度水平之间的关系。理想情况下,这两者应该完全吻合(即图表中的 𝑦 = 𝑥 y=x 线)。此外,还提供了放大版的插图来详细展示每个模型的校准误差,帮助理解不同模型在校准不确定性方面的能力差异。


下面展示了这几种关系图
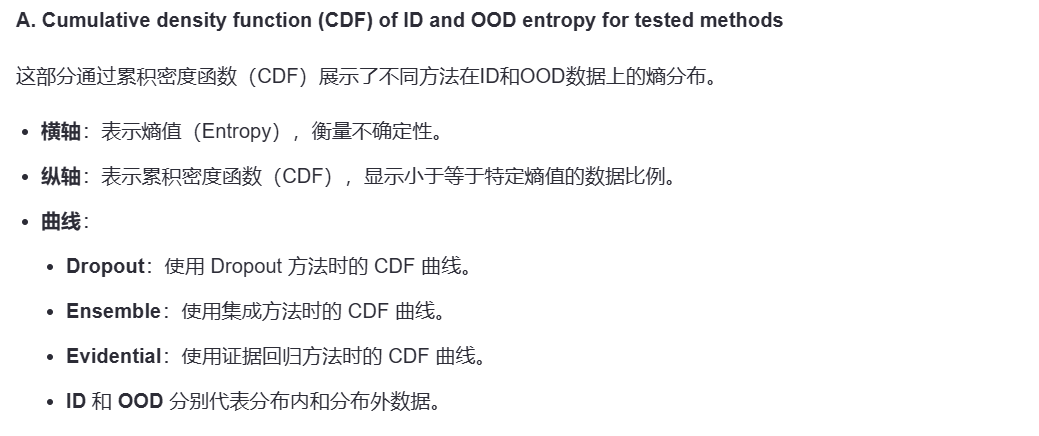
A. Cumulative density function (CDF) of ID and OOD entropy for tested methods
这部分通过累积密度函数(CDF)展示了不同方法(ID vs OOD)在熵上的分布情况。它可以帮助我们理解不同模型在识别OOD样本时的能力,理想情况下OOD样本应具有更高的熵值。
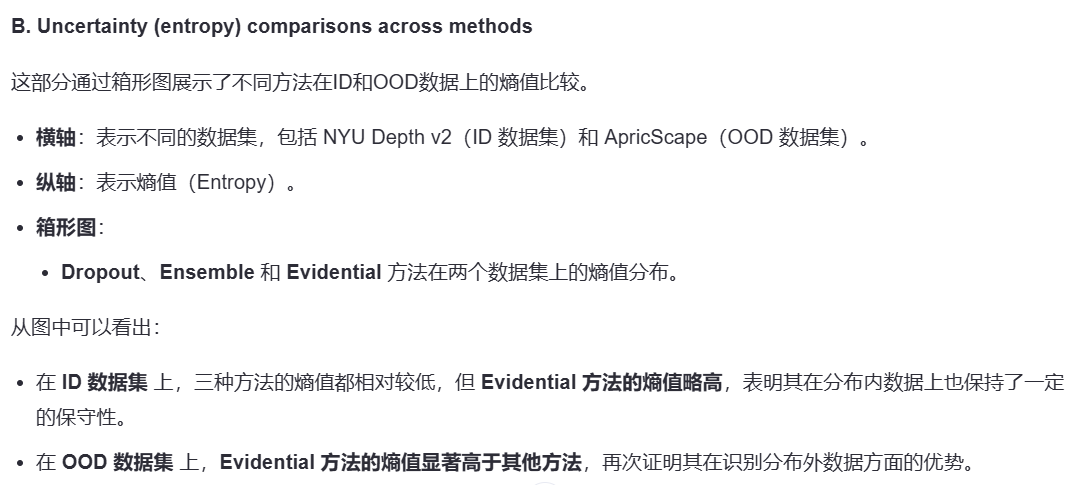
B. Uncertainty (entropy) comparisons across methods
此部分使用箱形图对比了不同方法在ID与OOD数据集上的熵值。这有助于直观地比较各种方法在不确定性估计上的差异,尤其是在区分ID和OOD数据方面。
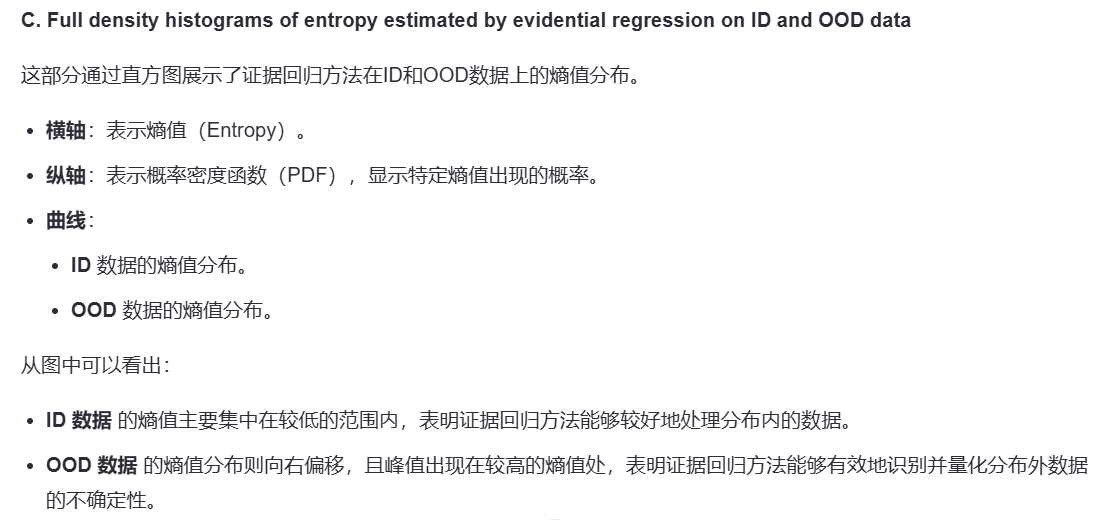
C. Full density histograms of entropy estimated by evidential regression on ID and OOD data
展示了基于证据回归方法对ID和OOD数据估算出的熵值的概率密度直方图。这有助于深入了解不同数据集下模型输出的不确定性分布情况。
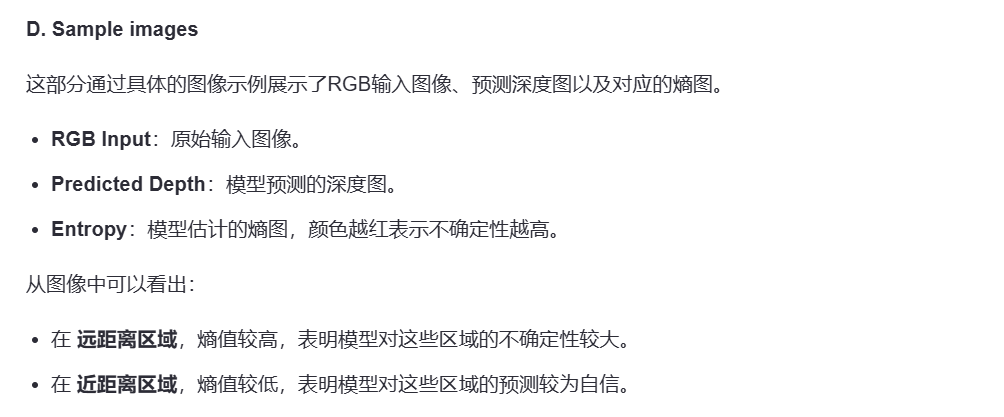
D. Sample images
提供了一些样本图像的例子,包括RGB输入、预测深度图以及对应的熵图。这部分通常用于视觉化展示模型预测结果及其不确定性区域,帮助理解和解释模型的行为。


下面展示了这几种关系图
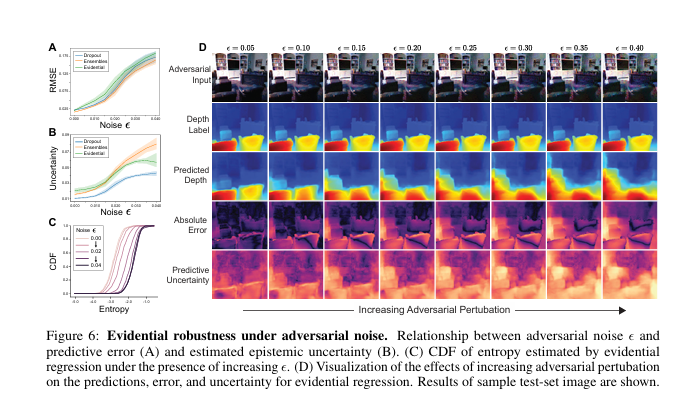
RMSE vs Noise ε:展示了对抗噪声强度与均方根误差(RMSE)之间的关系。
Uncertainty vs Noise ε:展示了对抗噪声强度与估计的不确定性之间的关系。
CDF of Entropy:显示了不同对抗噪声强度下熵的累积分布函数(CDF)。
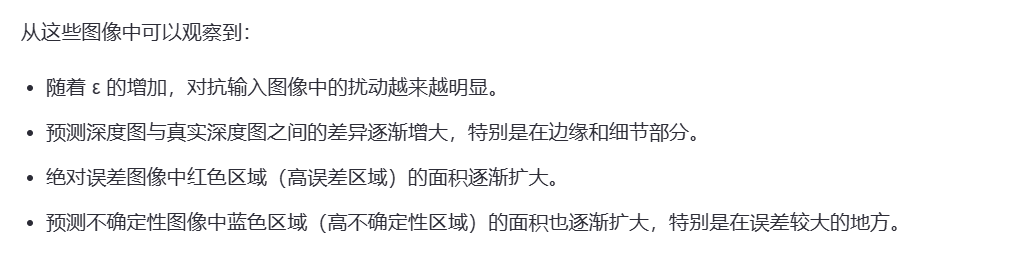
Visualization of Increasing Adversarial Perturbation:通过一系列图像展示了随着对抗扰动增加,输入图像、深度标签、预测深度、绝对误差及预测不确定性的变化情况。