【DSP笔记】解锁频率之秘:Z 变换与离散傅里叶变换的深度探索
解锁频率之秘:Z 变换与离散傅里叶变换的深度探索
想象一下,你是一位经验丰富的机械师,面对一台复杂的机器。时域分析就像你拿着放大镜,仔细观察每一个齿轮的转动,每一个连杆的摆动,这些细节无疑很重要,但整体的协调性、机器的“韵律”可能难以一眼看出。而频率域分析,就像你戴上特制的眼镜,瞬间就能看到机器的“心跳”,哪些部件在高速振动,哪些在低速运转,甚至能察觉到机器发出的“不和谐音”。
DTFT 和 Z 变换,就是这样的“特制眼镜”,它们帮助我们从信号的“形态”转变为信号的“成分”或“特征”,从而更高效地分析和设计系统。
探索信号的“频率成分”:离散时间傅里叶变换 (DTFT)
傅里叶分析的核心思想是,任何一个复杂的信号,都可以被分解成一系列简单的正弦(或复指数)信号的叠加。DTFT就是将这个思想应用到离散时间信号上。
DTFT 的“魔法公式”
对于一个离散时间序列 x ( n ) x(n) x(n),它的离散时间傅里叶变换 (DTFT) 定义为:
X ( e j ω ) = ∑ n = − ∞ ∞ x ( n ) e − j ω n X(e^{j\omega}) = \sum_{n=-\infty}^{\infty} x(n) e^{-j\omega n} X(ejω)=n=−∞∑∞x(n)e−jωn
其中:
- X ( e j ω ) X(e^{j\omega}) X(ejω) 是信号的频率响应,一个关于数字角频率 ω \omega ω 的连续函数。注意,这里的 e j ω e^{j\omega} ejω 表示 z z z 平面单位圆上的点,这是DTFT与Z变换的天然联系。
- ω \omega ω 是数字角频率,取值范围通常为 [ − π , π ) [-\pi, \pi) [−π,π) 或 [ 0 , 2 π ) [0, 2\pi) [0,2π)。
- e − j ω n e^{-j\omega n} e−jωn 类似于模拟傅里叶变换中的复指数项,代表了不同频率的“探针”。
反过来,如果我们知道了信号的DTFT X ( e j ω ) X(e^{j\omega}) X(ejω),我们可以通过逆离散时间傅里叶变换 (IDTFT) 恢复原始序列 x ( n ) x(n) x(n):
x ( n ) = 1 2 π ∫ − π π X ( e j ω ) e j ω n d ω x(n) = \frac{1}{2\pi} \int_{-\pi}^{\pi} X(e^{j\omega}) e^{j\omega n} d\omega x(n)=2π1∫−ππX(ejω)ejωndω
这就像我们把一个复杂的乐章分解成了各种音符的组合,又可以把这些音符重新组合成原来的乐章。
DTFT 的核心特性:简化计算的“秘密武器”
DTFT之所以强大,在于它拥有一系列优良的性质,这些性质能极大地简化信号处理的分析和计算。
-
周期性: X ( e j ω ) X(e^{j\omega}) X(ejω) 是关于 ω \omega ω 的周期函数,周期为 2 π 2\pi 2π。这意味着我们只需要分析一个 2 π 2\pi 2π 的周期内的频谱就足够了。
-
线性: 如果 x 1 ( n ) ↔ X 1 ( e j ω ) x_1(n) \leftrightarrow X_1(e^{j\omega}) x1(n)↔X1(ejω) 且 x 2 ( n ) ↔ X 2 ( e j ω ) x_2(n) \leftrightarrow X_2(e^{j\omega}) x2(n)↔X2(ejω),那么 a x 1 ( n ) + b x 2 ( n ) ↔ a X 1 ( e j ω ) + b X 2 ( e j ω ) ax_1(n) + bx_2(n) \leftrightarrow aX_1(e^{j\omega}) + bX_2(e^{j\omega}) ax1(n)+bx2(n)↔aX1(ejω)+bX2(ejω)。
-
时移特性: x ( n − n 0 ) ↔ e − j ω n 0 X ( e j ω ) x(n-n_0) \leftrightarrow e^{-j\omega n_0} X(e^{j\omega}) x(n−n0)↔e−jωn0X(ejω)。
信号在时域的延迟,对应于频域的相位改变(乘以一个复指数)。这个性质在通信系统中的延时补偿、滤波器设计中非常有用。 -
频移特性: e j ω 0 n x ( n ) ↔ X ( e j ( ω − ω 0 ) ) e^{j\omega_0 n} x(n) \leftrightarrow X(e^{j(\omega-\omega_0)}) ejω0nx(n)↔X(ej(ω−ω0))。
信号在时域乘以一个复指数(相当于载波调制),对应于频域的频谱搬移。在通信系统中用于实现信号的上下变频。 -
共轭对称性: 如果 x ( n ) x(n) x(n) 是实序列,那么其DTFT的幅度谱是偶对称的 ( ∣ X ( e j ω ) ∣ = ∣ X ( e − j ω ) ∣ |X(e^{j\omega})| = |X(e^{-j\omega})| ∣X(ejω)∣=∣X(e−jω)∣),相位谱是奇对称的 ( ∠ X ( e j ω ) = − ∠ X ( e − j ω ) − 2 π k \angle X(e^{j\omega}) = -\angle X(e^{-j\omega}) - 2\pi k ∠X(ejω)=−∠X(e−jω)−2πk)。
这个性质在设计实数滤波器时非常有用,可以减少计算量。 -
时域卷积定理: 这是DTFT最重要的性质之一!
y ( n ) = x ( n ) ∗ h ( n ) ↔ Y ( e j ω ) = X ( e j ω ) H ( e j ω ) y(n) = x(n) \ast h(n) \leftrightarrow Y(e^{j\omega}) = X(e^{j\omega}) H(e^{j\omega}) y(n)=x(n)∗h(n)↔Y(ejω)=X(ejω)H(ejω)
这意味着,在时域复杂的卷积运算,在频域变成了简单的乘法运算!这对于LTI系统的分析和设计来说,简直是革命性的。它让我们可以直接在频率域设计滤波器,通过修改 H ( e j ω ) H(e^{j\omega}) H(ejω) 来实现对特定频率成分的增强或衰减。 -
Parseval 定理: 信号的能量在时域和频域是守恒的。
∑ n = − ∞ ∞ ∣ x ( n ) ∣ 2 = 1 2 π ∫ − π π ∣ X ( e j ω ) ∣ 2 d ω \sum_{n=-\infty}^{\infty} |x(n)|^2 = \frac{1}{2\pi} \int_{-\pi}^{\pi} |X(e^{j\omega})|^2 d\omega n=−∞∑∞∣x(n)∣2=2π1∫−ππ∣X(ejω)∣2dω
它为我们提供了一种衡量信号能量的另一种方式。
离散傅里叶级数 (DFS):周期序列的频谱
对于周期序列 x ~ ( n ) \tilde{x}(n) x~(n)(周期为 N N N),我们不能直接使用DTFT,因为周期信号的能量是无限的,DTFT会得到冲激函数。我们使用离散傅里叶级数 (DFS) 来表示它们。
-
定义:
X ~ ( k ) = ∑ n = 0 N − 1 x ~ ( n ) W N k n , k = 0 , 1 , … , N − 1 \tilde{X}(k) = \sum_{n=0}^{N-1} \tilde{x}(n) W_N^{kn}, \quad k=0, 1, \dots, N-1 X~(k)=n=0∑N−1x~(n)WNkn,k=0,1,…,N−1
x ~ ( n ) = 1 N ∑ k = 0 N − 1 X ~ ( k ) W N − k n , n = 0 , 1 , … , N − 1 \tilde{x}(n) = \frac{1}{N} \sum_{k=0}^{N-1} \tilde{X}(k) W_N^{-kn}, \quad n=0, 1, \dots, N-1 x~(n)=N1k=0∑N−1X~(k)WN−kn,n=0,1,…,N−1
其中 W N = e − j 2 π / N W_N = e^{-j2\pi/N} WN=e−j2π/N。 -
与DTFT的关系: 周期序列的DTFT是一个冲激串,冲激的位置在 2 π k / N 2\pi k/N 2πk/N,强度与DFS系数相关。
摆脱“收敛”的束缚:Z 变换的强大通用性
DTFT虽然强大,但它有一个局限性:不是所有序列的DTFT都收敛。例如,单位阶跃序列 u ( n ) u(n) u(n) 就没有收敛的DTFT。为了解决这个问题,我们引入了更通用的Z 变换。
Z 变换的定义:DTFT 的推广
Z 变换可以看作是DTFT的推广。它引入了一个复变量 z z z,不再限制在单位圆上。
对于一个离散时间序列 x ( n ) x(n) x(n),它的 Z 变换定义为:
X ( z ) = ∑ n = − ∞ ∞ x ( n ) z − n X(z) = \sum_{n=-\infty}^{\infty} x(n) z^{-n} X(z)=n=−∞∑∞x(n)z−n
其中 z z z 是一个复数,通常表示为 z = r e j ω z = re^{j\omega} z=rejω。
- 当 ∣ z ∣ = r = 1 |z|=r=1 ∣z∣=r=1 时, z = e j ω z=e^{j\omega} z=ejω,Z 变换就退化为DTFT。
- Z 变换的存在要求无穷级数 ∑ n = − ∞ ∞ x ( n ) z − n \sum_{n=-\infty}^{\infty} x(n) z^{-n} ∑n=−∞∞x(n)z−n 能够收敛。
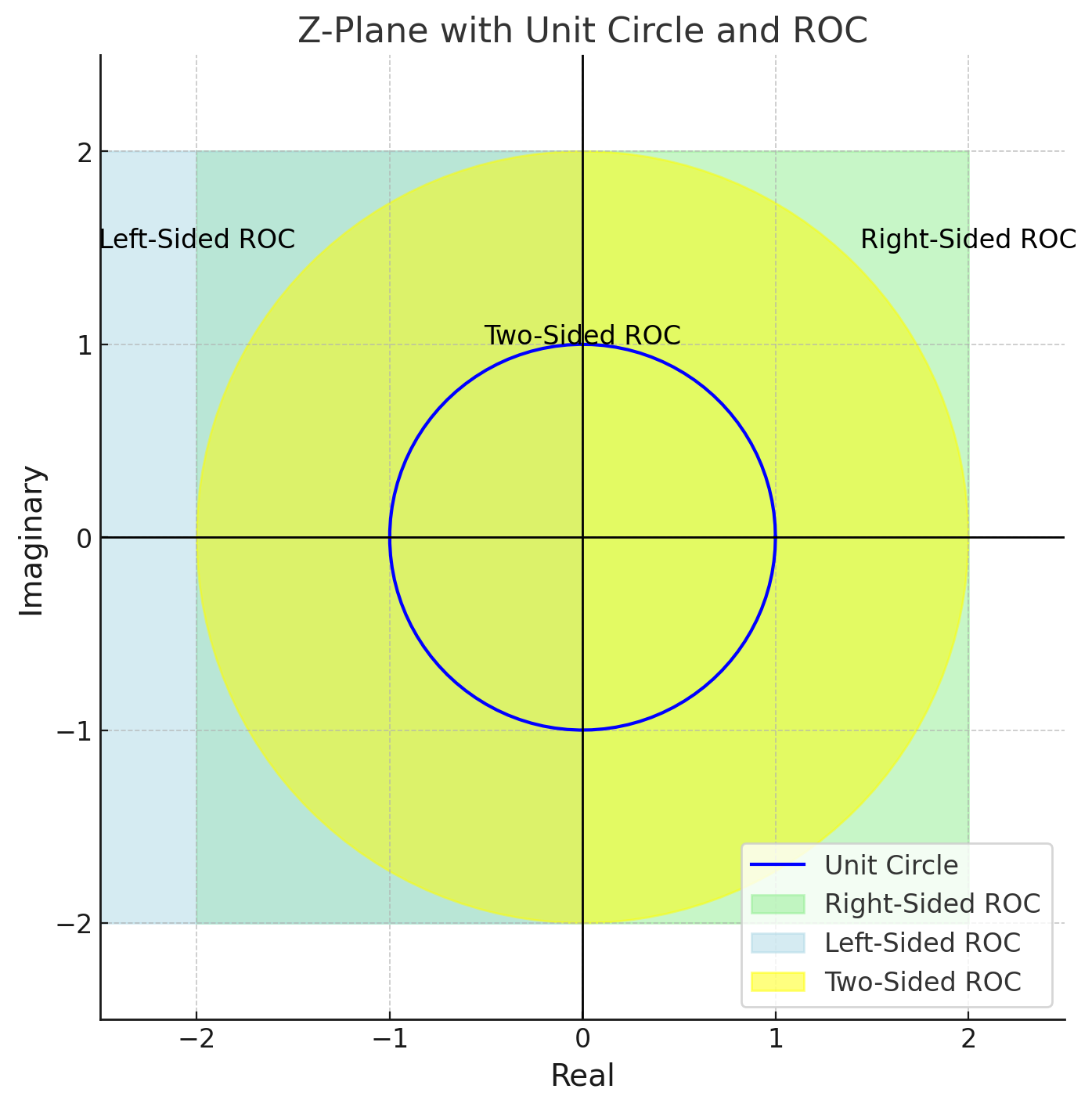
收敛域 (Region of Convergence, ROC):Z 变换的“身份证”
ROC是Z变换中最最重要的概念之一!它定义了Z变换存在的 z z z 值区域。如果一个序列的Z变换存在,那么它就有一个特定的ROC。
为什么ROC如此重要?
因为不同的序列可能有相同的Z变换表达式,但它们的ROC不同,意味着它们代表了完全不同的时域序列。离开了ROC,Z变换就没有意义! ROC就像Z变换的“身份证”,标识着它是哪个序列的Z变换。
序列类型对ROC的影响:
-
有限长序列:
- 序列只在有限个 n n n 值上有非零值。
- ROC是整个 z z z 平面(可能不包含 z = 0 z=0 z=0 或 z = ∞ z=\infty z=∞,取决于序列是否在这些点有值)。
- 例如: δ ( n ) \delta(n) δ(n) 的 Z 变换是 1 1 1,ROC 是整个 z z z 平面。
-
右边序列 (Right-Sided Sequence):
- 序列只在 n ≥ N 1 n \geq N_1 n≥N1(某个有限值)时有非零值。最常见的是因果序列( N 1 = 0 N_1=0 N1=0)。
- ROC是一个圆的外部区域,即 ∣ z ∣ > r 0 |z| > r_0 ∣z∣>r0。这个 r 0 r_0 r0 是由离原点最远的极点决定。
- 例如: a n u ( n ) a^n u(n) anu(n) 的 Z 变换是 1 1 − a z − 1 \frac{1}{1-az^{-1}} 1−az−11,ROC 是 ∣ z ∣ > ∣ a ∣ |z| > |a| ∣z∣>∣a∣。
-
左边序列 (Left-Sided Sequence):
- 序列只在 n ≤ N 2 n \leq N_2 n≤N2(某个有限值)时有非零值。
- ROC是一个圆的内部区域,即 ∣ z ∣ < r 0 |z| < r_0 ∣z∣<r0。这个 r 0 r_0 r0 是由离原点最近的极点决定。
- 例如: − a n u ( − n − 1 ) -a^n u(-n-1) −anu(−n−1) 的 Z 变换也是 1 1 − a z − 1 \frac{1}{1-az^{-1}} 1−az−11,但ROC是 ∣ z ∣ < ∣ a ∣ |z| < |a| ∣z∣<∣a∣。看,Z变换表达式相同,但ROC不同,代表的序列也就不同!
-
双边序列 (Two-Sided Sequence):
- 序列在正负无穷都有非零值。
- ROC是一个环形区域,即 r 1 < ∣ z ∣ < r 2 r_1 < |z| < r_2 r1<∣z∣<r2。
- 例如: x ( n ) = a n u ( n ) + b n u ( − n − 1 ) x(n) = a^n u(n) + b^n u(-n-1) x(n)=anu(n)+bnu(−n−1) 的Z变换ROC可能是环形。
逆 Z 变换:从 Z 域回到时域
知道了序列的 Z 变换 X ( z ) X(z) X(z) 和其 ROC,我们就可以通过逆 Z 变换 (IZT) 恢复原始序列 x ( n ) x(n) x(n)。
主要方法:
-
部分分式展开法:
- 这是最常用的方法。将 X ( z ) X(z) X(z) (或 X ( z ) / z X(z)/z X(z)/z) 展开为若干个简单分式的和。
- 对于每个简单分式,根据其形式和ROC,对照Z变换对表,就可以找到对应的时域序列。
- 关键: 必须结合ROC来确定每个分式对应的序列是右边序列还是左边序列。
步骤:
- 如果 X ( z ) X(z) X(z) 是一个真分式(分子阶数小于分母阶数),则直接展开。如果不是,可以先除以 z z z 得到 X ( z ) / z X(z)/z X(z)/z,展开后再乘以 z z z 回去。
- 找到分母多项式的根(极点)。
- 进行部分分式展开。
- 根据 Z 变换对表和 ROC,确定每一项的逆 Z 变换。
-
幂级数展开法:
- 将 X ( z ) X(z) X(z) 展开为关于 z − 1 z^{-1} z−1 或 z z z 的幂级数。
- 级数展开的系数就是序列 x ( n ) x(n) x(n) 的值。
- 这种方法适用于有限长序列或需要求序列前几项值的情况。
- 关键: 同样需要结合ROC来确定是按 z − 1 z^{-1} z−1 展开(对应右边序列)还是按 z z z 展开(对应左边序列)。
Z 变换的核心特性:LTI 系统分析的利器
Z 变换也拥有一系列重要的性质,这些性质使得它在LTI系统分析中发挥着关键作用。
- 线性: 与DTFT类似, a x 1 ( n ) + b x 2 ( n ) ↔ a X 1 ( z ) + b X 2 ( z ) a x_1(n) + b x_2(n) \leftrightarrow a X_1(z) + b X_2(z) ax1(n)+bx2(n)↔aX1(z)+bX2(z)。
- 时移特性: x ( n − n 0 ) ↔ z − n 0 X ( z ) x(n-n_0) \leftrightarrow z^{-n_0} X(z) x(n−n0)↔z−n0X(z)。
这个性质在求解差分方程时至关重要,它将时域的延迟操作直接转换为Z域的乘法。 - 乘以指数序列: a n x ( n ) ↔ X ( z / a ) a^n x(n) \leftrightarrow X(z/a) anx(n)↔X(z/a)。
这表明在时域乘以一个指数因子,在Z域会引起Z平面的尺度变换。 - 微分特性: n x ( n ) ↔ − z d X ( z ) d z nx(n) \leftrightarrow -z \frac{dX(z)}{dz} nx(n)↔−zdzdX(z)。
这个性质可以用来计算某些复杂序列的Z变换,或者证明其他性质。 - 时域卷积定理: 这是Z变换最重要的性质之一!
y ( n ) = x ( n ) ∗ h ( n ) ↔ Y ( z ) = X ( z ) H ( z ) y(n) = x(n) \ast h(n) \leftrightarrow Y(z) = X(z) H(z) y(n)=x(n)∗h(n)↔Y(z)=X(z)H(z)
和DTFT一样,它把时域的卷积变成了Z域的简单乘法!这是Z变换能大大简化系统分析和设计的根本原因。
利用 Z 变换解差分方程:大招来了!
还记得第一章我们用递推法解差分方程吗?当序列较长时,那会非常麻烦。Z 变换提供了更优雅、更高效的解决方案!
利用Z变换解差分方程的步骤:
-
对差分方程两边进行Z变换:
- 利用 Z 变换的线性性质。
- 利用 Z 变换的时移性质: Z T [ y ( n − k ) ] = z − k Y ( z ) + ∑ m = 1 k y ( − m ) z m − k \mathrm{ZT}[y(n-k)] = z^{-k} Y(z) + \sum_{m=1}^k y(-m) z^{m-k} ZT[y(n−k)]=z−kY(z)+∑m=1ky(−m)zm−k (这个是考虑非零初始条件的情况,如果初始条件为零,就简化为 z − k Y ( z ) z^{-k} Y(z) z−kY(z))。
- 对于输入 x ( n ) x(n) x(n) 也同样进行Z变换。
-
代数求解 Y ( z ) Y(z) Y(z):
将Z变换后的方程视为一个代数方程,解出 Y ( z ) Y(z) Y(z) 的表达式,通常是 z z z 的有理分式。 -
对 Y ( z ) Y(z) Y(z) 进行逆Z变换:
利用部分分式展开法(或幂级数展开法),将 Y ( z ) Y(z) Y(z) 转换为时域输出序列 y ( n ) y(n) y(n)。在这一步,需要结合系统的因果性或稳定性来确定正确的ROC,从而选择正确的逆变换形式。
例子: 求解 y ( n ) − 0.5 y ( n − 1 ) = x ( n ) y(n) - 0.5y(n-1) = x(n) y(n)−0.5y(n−1)=x(n),已知 x ( n ) = u ( n ) x(n)=u(n) x(n)=u(n),初始条件 y ( − 1 ) = 0 y(-1)=0 y(−1)=0。
- Z变换:
Y ( z ) − 0.5 ( z − 1 Y ( z ) + y ( − 1 ) z 0 ) = X ( z ) Y(z) - 0.5(z^{-1}Y(z) + y(-1)z^0) = X(z) Y(z)−0.5(z−1Y(z)+y(−1)z0)=X(z)
Y ( z ) − 0.5 z − 1 Y ( z ) = X ( z ) Y(z) - 0.5z^{-1}Y(z) = X(z) Y(z)−0.5z−1Y(z)=X(z) (因为 y ( − 1 ) = 0 y(-1)=0 y(−1)=0)
Y ( z ) ( 1 − 0.5 z − 1 ) = X ( z ) Y(z)(1 - 0.5z^{-1}) = X(z) Y(z)(1−0.5z−1)=X(z) - 求解 Y ( z ) Y(z) Y(z):
X ( z ) = 1 1 − z − 1 X(z) = \frac{1}{1-z^{-1}} X(z)=1−z−11 (对于 u ( n ) u(n) u(n),ROC 是 ∣ z ∣ > 1 |z|>1 ∣z∣>1)
Y ( z ) = X ( z ) 1 − 0.5 z − 1 = 1 ( 1 − z − 1 ) ( 1 − 0.5 z − 1 ) Y(z) = \frac{X(z)}{1 - 0.5z^{-1}} = \frac{1}{(1-z^{-1})(1-0.5z^{-1})} Y(z)=1−0.5z−1X(z)=(1−z−1)(1−0.5z−1)1 - 逆Z变换:
Y ( z ) = A 1 − z − 1 + B 1 − 0.5 z − 1 Y(z) = \frac{A}{1-z^{-1}} + \frac{B}{1-0.5z^{-1}} Y(z)=1−z−1A+1−0.5z−1B
解得 A = 2 , B = − 1 A=2, B=-1 A=2,B=−1 (具体计算略)。
Y ( z ) = 2 1 − z − 1 − 1 1 − 0.5 z − 1 Y(z) = \frac{2}{1-z^{-1}} - \frac{1}{1-0.5z^{-1}} Y(z)=1−z−12−1−0.5z−11
由于系统是因果的,其ROC应该包含输入 u ( n ) u(n) u(n) 的ROC( ∣ z ∣ > 1 |z|>1 ∣z∣>1)以及系统本身的ROC(通常是所有极点外的区域)。在此例中,系统极点在 z = 1 z=1 z=1 和 z = 0.5 z=0.5 z=0.5,所以系统的ROC是 ∣ z ∣ > 1 |z|>1 ∣z∣>1。
因此,两项都对应右边序列:
y ( n ) = 2 u ( n ) − ( 0.5 ) n u ( n ) y(n) = 2u(n) - (0.5)^n u(n) y(n)=2u(n)−(0.5)nu(n)。
系统函数与频率响应:从 Z 域看系统特性
Z 变换不仅能解差分方程,它更是分析LTI系统特性(如因果性、稳定性、频率响应)的强大工具。
系统函数 H ( z ) H(z) H(z):系统的“数学模型”
对于一个LTI系统,当初始条件为零时,其输出 Y ( z ) Y(z) Y(z) 与输入 X ( z ) X(z) X(z) 的 Z 变换之比,称为系统的系统函数 (System Function),用 H ( z ) H(z) H(z) 表示:
H ( z ) = Y ( z ) X ( z ) H(z) = \frac{Y(z)}{X(z)} H(z)=X(z)Y(z)
如果系统由线性常系数差分方程描述: ∑ k = 0 N a k y ( n − k ) = ∑ m = 0 M b m x ( n − m ) \sum_{k=0}^N a_k y(n-k) = \sum_{m=0}^M b_m x(n-m) ∑k=0Naky(n−k)=∑m=0Mbmx(n−m)
对其进行Z变换(零初始条件): ∑ k = 0 N a k z − k Y ( z ) = ∑ m = 0 M b m z − m X ( z ) \sum_{k=0}^N a_k z^{-k} Y(z) = \sum_{m=0}^M b_m z^{-m} X(z) ∑k=0Nakz−kY(z)=∑m=0Mbmz−mX(z)
于是,系统函数为:
H ( z ) = ∑ m = 0 M b m z − m ∑ k = 0 N a k z − k H(z) = \frac{\sum_{m=0}^M b_m z^{-m}}{\sum_{k=0}^N a_k z^{-k}} H(z)=∑k=0Nakz−k∑m=0Mbmz−m
系统函数 H ( z ) H(z) H(z) 是 z z z 的有理分式,可以表示为零点和极点的乘积形式:
H ( z ) = b 0 a 0 ∏ m = 1 M ( 1 − c m z − 1 ) ∏ k = 1 N ( 1 − d k z − 1 ) H(z) = \frac{b_0}{a_0} \frac{\prod_{m=1}^M (1-c_m z^{-1})}{\prod_{k=1}^N (1-d_k z^{-1})} H(z)=a0b0∏k=1N(1−dkz−1)∏m=1M(1−cmz−1)
其中 c m c_m cm 是零点(使 H ( z ) = 0 H(z)=0 H(z)=0 的 z z z 值), d k d_k dk 是极点(使 H ( z ) → ∞ H(z) \to \infty H(z)→∞ 的 z z z 值)。
频率响应函数 H ( e j ω ) H(e^{j\omega}) H(ejω):系统的“频率指纹”
一个LTI系统的频率响应 H ( e j ω ) H(e^{j\omega}) H(ejω),是其系统函数 H ( z ) H(z) H(z) 在单位圆 ∣ z ∣ = 1 |z|=1 ∣z∣=1 上的取值:
H ( e j ω ) = H ( z ) ∣ z = e j ω H(e^{j\omega}) = H(z)|_{z=e^{j\omega}} H(ejω)=H(z)∣z=ejω
前提是单位圆必须包含在 H ( z ) H(z) H(z) 的ROC内。
- ∣ H ( e j ω ) ∣ |H(e^{j\omega})| ∣H(ejω)∣ 是幅度响应,描述系统对不同频率信号的增益或衰减。
- ∠ H ( e j ω ) \angle H(e^{j\omega}) ∠H(ejω) 是相位响应,描述系统对不同频率信号的相位延迟。
- 通过分析 H ( e j ω ) H(e^{j\omega}) H(ejω) 的幅度谱和相位谱,我们可以判断系统是低通、高通、带通、带阻等,以及它对信号相位的影响。
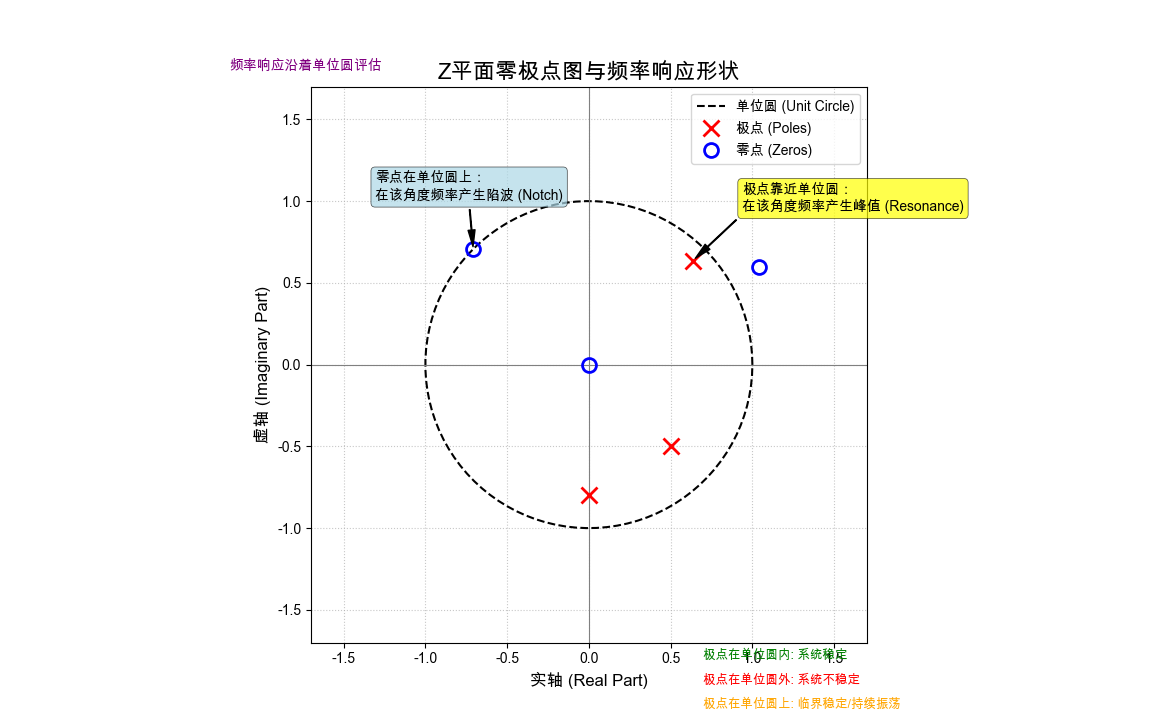
零极点分析频响特性:洞察系统行为的关键
Z 平面上的零点和极点分布,直观地揭示了系统的频率响应特性。
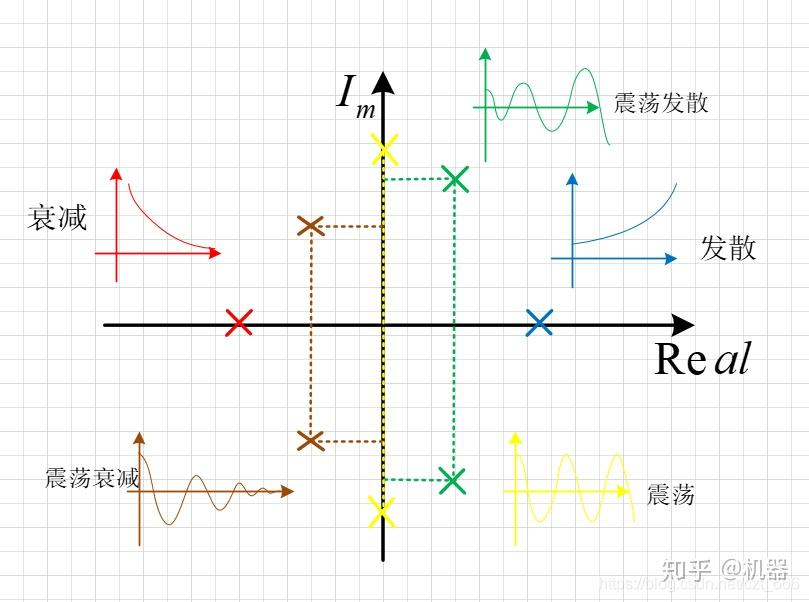
- 极点 (Poles): 极点的位置决定了系统在某个频率附近的放大特性。
- 如果一个极点靠近单位圆,那么在它对应的频率点(单位圆上与极点径向方向相同的点),幅度响应会显著增大。
- 如果极点在单位圆上,则系统在该频率处会有无限大的增益,系统可能不稳定。
- 零点 (Zeros): 零点的位置决定了系统在某个频率附近的衰减特性。
- 如果一个零点靠近单位圆,那么在它对应的频率点,幅度响应会显著衰减。
- 如果零点恰好落在单位圆上,那么在它对应的频率点,幅度响应为零,该频率分量会被系统完全“扼杀”(例如,陷波滤波器)。
因果性与稳定性判断:Z 变换的“诊断报告”
Z 变换和ROC为LTI系统的因果性和稳定性提供了非常直观的判据。
-
因果LTI系统:
- 其ROC必须是其最外层极点之外的区域(一个圆外部)。
- 其单位脉冲响应 h ( n ) h(n) h(n) 必须是右边序列。
- 如果系统是因果的,且由差分方程描述,那么其 H ( z ) H(z) H(z) 的所有极点都必须位于有限平面内(即没有无穷远的极点)。
-
稳定LTI系统 (BIBO 稳定):
- 其ROC必须包含单位圆。
- 其单位脉冲响应 h ( n ) h(n) h(n) 必须是绝对可和的。
-
因果且稳定LTI系统:
- 如果一个LTI系统既因果又稳定,那么它的ROC必须是其最外层极点之外的区域,并且该区域必须包含单位圆。
- 这意味着,对于因果LTI系统,其所有极点都必须位于单位圆之内。这是判断因果LTI系统稳定性的黄金法则!
- 在控制系统中,系统的极点位置是决定其稳定性的关键。如果控制系统的极点位于单位圆外,系统就会发散,无法稳定运行。
总结与展望
在第二章,我们掌握了数字信号处理中至关重要的两大工具:
- 离散时间傅里叶变换 (DTFT):让我们能够将时域信号分解为频率成分,理解信号的频率内容,并发现时域卷积对应频域乘积这一简化分析的“黄金法则”。
- Z 变换:作为DTFT的推广,它拥有更广阔的适用范围,并引入了收敛域 (ROC) 这一核心概念,使Z变换能够完整地描述序列。通过Z变换,我们能够轻松地求解差分方程,将复杂的时域问题转化为代数问题。
更重要的是,我们学习了如何利用系统函数 H ( z ) H(z) H(z) 和其零极点在Z平面上的分布来分析LTI系统的频率响应、因果性和稳定性。特别是“因果LTI系统所有极点必须在单位圆内才稳定”这一结论,在数字滤波器设计和控制系统分析中具有指导性意义。
有了这些强大的变换工具,我们现在可以更深入地理解和设计数字信号处理系统了。然而,DTFT是一个连续函数,Z变换也是定义在连续的复平面上,它们在计算机中无法直接计算。这就引出了下一章的内容:离散傅里叶变换 (DFT),它将是我们在数字世界中实际计算频谱的桥梁。敬请期待!
习题
学以致用,下面是几道练习题,帮助你巩固本章的知识点。
1. Z 变换和 ROC:
求序列 x ( n ) = ( 0.8 ) n u ( n ) + ( 1.2 ) n u ( − n − 1 ) x(n) = (0.8)^n u(n) + (1.2)^n u(-n-1) x(n)=(0.8)nu(n)+(1.2)nu(−n−1) 的 Z 变换 X ( z ) X(z) X(z) 及其 ROC。
2. 逆 Z 变换:
已知 Z 变换 X ( z ) = 1 ( 1 − 0.5 z − 1 ) ( 1 − 2 z − 1 ) X(z) = \frac{1}{(1-0.5z^{-1})(1-2z^{-1})} X(z)=(1−0.5z−1)(1−2z−1)1。
a) 如果 ROC 是 ∣ z ∣ > 2 |z| > 2 ∣z∣>2,求 x ( n ) x(n) x(n)。
b) 如果 ROC 是 ∣ z ∣ < 0.5 |z| < 0.5 ∣z∣<0.5,求 x ( n ) x(n) x(n)。
c) 如果 ROC 是 0.5 < ∣ z ∣ < 2 0.5 < |z| < 2 0.5<∣z∣<2,求 x ( n ) x(n) x(n)。
3. Z 变换解差分方程:
一个LTI系统由差分方程描述: y ( n ) − 0.25 y ( n − 2 ) = x ( n ) y(n) - 0.25y(n-2) = x(n) y(n)−0.25y(n−2)=x(n)。
已知输入 x ( n ) = δ ( n ) x(n) = \delta(n) x(n)=δ(n),且系统是因果的,所有初始条件为零。
a) 求系统函数 H ( z ) H(z) H(z)。
b) 求系统的单位脉冲响应 h ( n ) h(n) h(n)。
4. 系统稳定性与因果性:
一个LTI系统的系统函数为 H ( z ) = z + 1 z 2 − 1.5 z + 0.5 H(z) = \frac{z+1}{z^2 - 1.5z + 0.5} H(z)=z2−1.5z+0.5z+1。
a) 绘制零极点图。
b) 如果系统是因果的,判断它是否稳定。
c) 如果系统是稳定的,判断它是否因果。
答案
1. Z 变换和 ROC:
对于 x 1 ( n ) = ( 0.8 ) n u ( n ) x_1(n) = (0.8)^n u(n) x1(n)=(0.8)nu(n), X 1 ( z ) = 1 1 − 0.8 z − 1 X_1(z) = \frac{1}{1-0.8z^{-1}} X1(z)=1−0.8z−11,ROC 是 ∣ z ∣ > 0.8 |z| > 0.8 ∣z∣>0.8。
对于 x 2 ( n ) = ( 1.2 ) n u ( − n − 1 ) x_2(n) = (1.2)^n u(-n-1) x2(n)=(1.2)nu(−n−1),这是一个左边序列。
我们知道 − ( 1.2 ) n u ( − n − 1 ) -(1.2)^n u(-n-1) −(1.2)nu(−n−1) 的 Z 变换是 1 1 − 1.2 z − 1 \frac{1}{1-1.2z^{-1}} 1−1.2z−11,ROC 是 ∣ z ∣ < 1.2 |z| < 1.2 ∣z∣<1.2。
所以 x 2 ( n ) = − ( 1.2 ) n u ( − n − 1 ) x_2(n) = -(1.2)^n u(-n-1) x2(n)=−(1.2)nu(−n−1) 对应 X 2 ( z ) = − 1 1 − 1.2 z − 1 X_2(z) = -\frac{1}{1-1.2z^{-1}} X2(z)=−1−1.2z−11,ROC 是 ∣ z ∣ < 1.2 |z| < 1.2 ∣z∣<1.2。
根据线性性质, X ( z ) = X 1 ( z ) + X 2 ( z ) = 1 1 − 0.8 z − 1 − 1 1 − 1.2 z − 1 X(z) = X_1(z) + X_2(z) = \frac{1}{1-0.8z^{-1}} - \frac{1}{1-1.2z^{-1}} X(z)=X1(z)+X2(z)=1−0.8z−11−1−1.2z−11。
系统的 ROC 是两个子序列 ROC 的交集,即 ( ∣ z ∣ > 0.8 ) ∩ ( ∣ z ∣ < 1.2 ) = 0.8 < ∣ z ∣ < 1.2 (|z| > 0.8) \cap (|z| < 1.2) = 0.8 < |z| < 1.2 (∣z∣>0.8)∩(∣z∣<1.2)=0.8<∣z∣<1.2。
所以, X ( z ) = 1 1 − 0.8 z − 1 − 1 1 − 1.2 z − 1 X(z) = \frac{1}{1-0.8z^{-1}} - \frac{1}{1-1.2z^{-1}} X(z)=1−0.8z−11−1−1.2z−11,ROC 为 0.8 < ∣ z ∣ < 1.2 0.8 < |z| < 1.2 0.8<∣z∣<1.2。
2. 逆 Z 变换:
X ( z ) = 1 ( 1 − 0.5 z − 1 ) ( 1 − 2 z − 1 ) X(z) = \frac{1}{(1-0.5z^{-1})(1-2z^{-1})} X(z)=(1−0.5z−1)(1−2z−1)1
先进行部分分式展开:
X ( z ) = A 1 − 0.5 z − 1 + B 1 − 2 z − 1 X(z) = \frac{A}{1-0.5z^{-1}} + \frac{B}{1-2z^{-1}} X(z)=1−0.5z−1A+1−2z−1B
1 = A ( 1 − 2 z − 1 ) + B ( 1 − 0.5 z − 1 ) 1 = A(1-2z^{-1}) + B(1-0.5z^{-1}) 1=A(1−2z−1)+B(1−0.5z−1)
令 z − 1 = 2 z^{-1}=2 z−1=2: 1 = A ( 1 − 4 ) + B ( 1 − 1 ) = − 3 A ⇒ A = − 1 / 3 1 = A(1-4) + B(1-1) = -3A \Rightarrow A = -1/3 1=A(1−4)+B(1−1)=−3A⇒A=−1/3
令 z − 1 = 0.5 z^{-1}=0.5 z−1=0.5: 1 = A ( 1 − 1 ) + B ( 1 − 0.25 ) = 0.75 B ⇒ B = 4 / 3 1 = A(1-1) + B(1-0.25) = 0.75B \Rightarrow B = 4/3 1=A(1−1)+B(1−0.25)=0.75B⇒B=4/3
所以 X ( z ) = − 1 / 3 1 − 0.5 z − 1 + 4 / 3 1 − 2 z − 1 X(z) = \frac{-1/3}{1-0.5z^{-1}} + \frac{4/3}{1-2z^{-1}} X(z)=1−0.5z−1−1/3+1−2z−14/3
a) 如果 ROC 是 ∣ z ∣ > 2 |z| > 2 ∣z∣>2:
这意味着序列是右边序列。两项都对应右边序列的形式。
x ( n ) = − 1 3 ( 0.5 ) n u ( n ) + 4 3 ( 2 ) n u ( n ) x(n) = -\frac{1}{3}(0.5)^n u(n) + \frac{4}{3}(2)^n u(n) x(n)=−31(0.5)nu(n)+34(2)nu(n)
b) 如果 ROC 是 ∣ z ∣ < 0.5 |z| < 0.5 ∣z∣<0.5:
这意味着序列是左边序列。两项都对应左边序列的形式。
x ( n ) = − ( − 1 3 ) ( 0.5 ) n u ( − n − 1 ) + ( − 4 3 ) ( 2 ) n u ( − n − 1 ) x(n) = -(-\frac{1}{3})(0.5)^n u(-n-1) + (-\frac{4}{3})(2)^n u(-n-1) x(n)=−(−31)(0.5)nu(−n−1)+(−34)(2)nu(−n−1)
x ( n ) = 1 3 ( 0.5 ) n u ( − n − 1 ) − 4 3 ( 2 ) n u ( − n − 1 ) x(n) = \frac{1}{3}(0.5)^n u(-n-1) - \frac{4}{3}(2)^n u(-n-1) x(n)=31(0.5)nu(−n−1)−34(2)nu(−n−1)
c) 如果 ROC 是 0.5 < ∣ z ∣ < 2 0.5 < |z| < 2 0.5<∣z∣<2:
这意味着第一项 ( 1 − 0.5 z − 1 ) − 1 (1-0.5z^{-1})^{-1} (1−0.5z−1)−1 对应右边序列(因为 ∣ z ∣ > 0.5 |z|>0.5 ∣z∣>0.5),第二项 ( 1 − 2 z − 1 ) − 1 (1-2z^{-1})^{-1} (1−2z−1)−1 对应左边序列(因为 ∣ z ∣ < 2 |z|<2 ∣z∣<2)。
x ( n ) = − 1 3 ( 0.5 ) n u ( n ) + ( − 4 3 ) ( 2 ) n u ( − n − 1 ) x(n) = -\frac{1}{3}(0.5)^n u(n) + (-\frac{4}{3})(2)^n u(-n-1) x(n)=−31(0.5)nu(n)+(−34)(2)nu(−n−1)
x ( n ) = − 1 3 ( 0.5 ) n u ( n ) − 4 3 ( 2 ) n u ( − n − 1 ) x(n) = -\frac{1}{3}(0.5)^n u(n) - \frac{4}{3}(2)^n u(-n-1) x(n)=−31(0.5)nu(n)−34(2)nu(−n−1)
3. Z 变换解差分方程:
差分方程: y ( n ) − 0.25 y ( n − 2 ) = x ( n ) y(n) - 0.25y(n-2) = x(n) y(n)−0.25y(n−2)=x(n)
a) 求系统函数 H ( z ) H(z) H(z):零初始条件,对差分方程进行 Z 变换。
Y ( z ) − 0.25 z − 2 Y ( z ) = X ( z ) Y(z) - 0.25z^{-2}Y(z) = X(z) Y(z)−0.25z−2Y(z)=X(z)
Y ( z ) ( 1 − 0.25 z − 2 ) = X ( z ) Y(z)(1 - 0.25z^{-2}) = X(z) Y(z)(1−0.25z−2)=X(z)
H ( z ) = Y ( z ) X ( z ) = 1 1 − 0.25 z − 2 H(z) = \frac{Y(z)}{X(z)} = \frac{1}{1 - 0.25z^{-2}} H(z)=X(z)Y(z)=1−0.25z−21
b) 求单位脉冲响应 h ( n ) h(n) h(n):令 x ( n ) = δ ( n ) ⇒ X ( z ) = 1 x(n) = \delta(n) \Rightarrow X(z)=1 x(n)=δ(n)⇒X(z)=1。
则 Y ( z ) = H ( z ) = 1 1 − 0.25 z − 2 Y(z) = H(z) = \frac{1}{1 - 0.25z^{-2}} Y(z)=H(z)=1−0.25z−21
因式分解分母: 1 − 0.25 z − 2 = ( 1 − 0.5 z − 1 ) ( 1 + 0.5 z − 1 ) 1 - 0.25z^{-2} = (1 - 0.5z^{-1})(1 + 0.5z^{-1}) 1−0.25z−2=(1−0.5z−1)(1+0.5z−1)
Y ( z ) = 1 ( 1 − 0.5 z − 1 ) ( 1 + 0.5 z − 1 ) Y(z) = \frac{1}{(1-0.5z^{-1})(1+0.5z^{-1})} Y(z)=(1−0.5z−1)(1+0.5z−1)1
部分分式展开:
Y ( z ) = A 1 − 0.5 z − 1 + B 1 + 0.5 z − 1 Y(z) = \frac{A}{1-0.5z^{-1}} + \frac{B}{1+0.5z^{-1}} Y(z)=1−0.5z−1A+1+0.5z−1B
1 = A ( 1 + 0.5 z − 1 ) + B ( 1 − 0.5 z − 1 ) 1 = A(1+0.5z^{-1}) + B(1-0.5z^{-1}) 1=A(1+0.5z−1)+B(1−0.5z−1)
令 z − 1 = 2 z^{-1}=2 z−1=2: 1 = A ( 1 + 1 ) = 2 A ⇒ A = 1 / 2 1 = A(1+1) = 2A \Rightarrow A = 1/2 1=A(1+1)=2A⇒A=1/2
令 z − 1 = − 2 z^{-1}=-2 z−1=−2: 1 = B ( 1 + 1 ) = 2 B ⇒ B = 1 / 2 1 = B(1+1) = 2B \Rightarrow B = 1/2 1=B(1+1)=2B⇒B=1/2
所以 Y ( z ) = 1 / 2 1 − 0.5 z − 1 + 1 / 2 1 + 0.5 z − 1 Y(z) = \frac{1/2}{1-0.5z^{-1}} + \frac{1/2}{1+0.5z^{-1}} Y(z)=1−0.5z−11/2+1+0.5z−11/2
由于系统是因果的,ROC 是 ∣ z ∣ > 0.5 |z| > 0.5 ∣z∣>0.5。因此两项都对应右边序列。
h ( n ) = 1 2 ( 0.5 ) n u ( n ) + 1 2 ( − 0.5 ) n u ( n ) h(n) = \frac{1}{2}(0.5)^n u(n) + \frac{1}{2}(-0.5)^n u(n) h(n)=21(0.5)nu(n)+21(−0.5)nu(n)
4. 系统稳定性与因果性:
H ( z ) = z + 1 z 2 − 1.5 z + 0.5 H(z) = \frac{z+1}{z^2 - 1.5z + 0.5} H(z)=z2−1.5z+0.5z+1
a) 绘制零极点图:
- 零点:分子为零,即 z + 1 = 0 ⇒ z 1 = − 1 z+1=0 \Rightarrow z_1 = -1 z+1=0⇒z1=−1。
- 极点:分母为零,即 z 2 − 1.5 z + 0.5 = 0 z^2 - 1.5z + 0.5 = 0 z2−1.5z+0.5=0。
( z − 1 ) ( z − 0.5 ) = 0 ⇒ z 2 = 1 , z 3 = 0.5 (z-1)(z-0.5) = 0 \Rightarrow z_2 = 1, z_3 = 0.5 (z−1)(z−0.5)=0⇒z2=1,z3=0.5。
在 Z 平面上: - 零点在 z = − 1 z=-1 z=−1 处。
- 极点在 z = 0.5 z=0.5 z=0.5 和 z = 1 z=1 z=1 处。
(绘制Z平面,画出单位圆,在 z = − 1 z=-1 z=−1 处画 O,在 z = 0.5 z=0.5 z=0.5 和 z = 1 z=1 z=1 处画 X。)
b) 如果系统是因果的,判断它是否稳定:
对于因果LTI系统,其ROC是最外层极点之外的区域。本系统的极点在 z = 0.5 z=0.5 z=0.5 和 z = 1 z=1 z=1,因此因果系统的ROC是 ∣ z ∣ > 1 |z|>1 ∣z∣>1。
稳定性要求ROC包含单位圆。 由于ROC ∣ z ∣ > 1 |z|>1 ∣z∣>1 不包含单位圆(因为 z = 1 z=1 z=1 在ROC的边界上,而不是内部),所以系统不稳定。
c) 如果系统是稳定的,判断它是否因果:
稳定性要求ROC包含单位圆。 极点在 z = 0.5 z=0.5 z=0.5 和 z = 1 z=1 z=1。
为了使ROC包含单位圆,ROC 必须是 0.5 < ∣ z ∣ < 1 0.5 < |z| < 1 0.5<∣z∣<1 或 0.5 < ∣ z ∣ < ∞ 0.5 < |z| < \infty 0.5<∣z∣<∞ (不包含 z = 1 z=1 z=1 的情况,需要考虑极点性质)。
由于 z = 1 z=1 z=1 处有一个极点,如果ROC包含单位圆,那么单位圆必须在极点 z = 1 z=1 z=1 的左边,且在极点 z = 0.5 z=0.5 z=0.5 的右边。
唯一的可能ROC是 0.5 < ∣ z ∣ < 1 0.5 < |z| < 1 0.5<∣z∣<1。
如果ROC是 0.5 < ∣ z ∣ < 1 0.5 < |z| < 1 0.5<∣z∣<1,这是一个环形区域,表示序列是双边序列。
因此,如果系统是稳定的,它将不是因果的 (因为因果系统的ROC必须是圆外区域)。