卫星姿态描述基础知识学习记录(部分)
相对姿态(坐标系旋转)的描述:假设目标的坐标系为B,参考坐标系为R,对目标的姿态描述即确定目标坐标系与参考坐标系的关系。由于目标坐标系一般固结在目标上,这样便实现了目标的相对姿态描述。描述方式主要有:方向余弦式、欧拉轴/角式、欧拉角式、姿态四元数;由于姿态可唯一确定,这些描述方式间可相互转换。
1.方向余弦
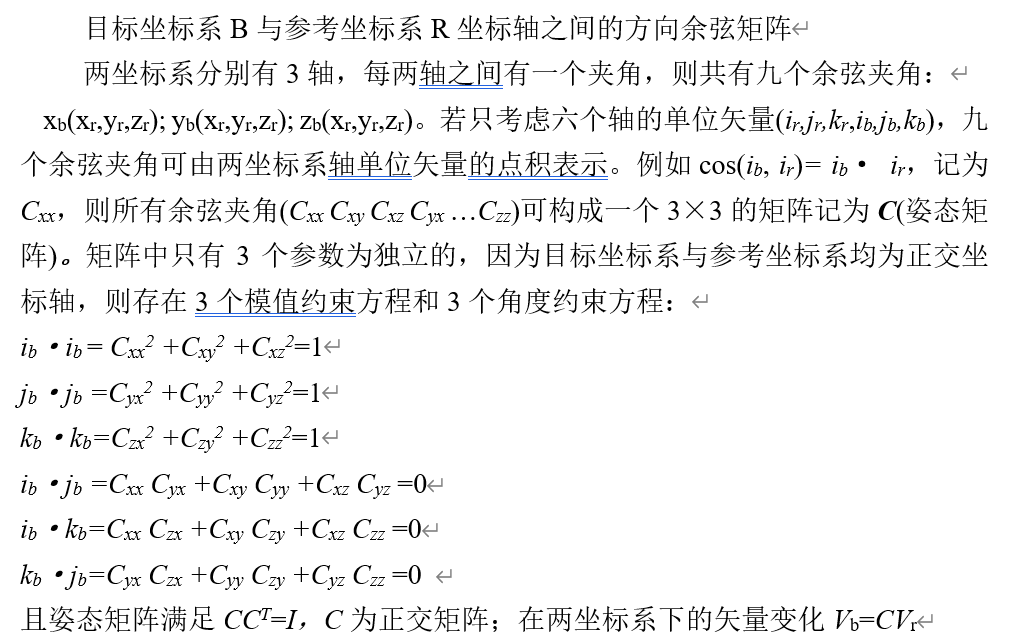 其中Vr一般已知,Vb为测量值,C为所求。
其中Vr一般已知,Vb为测量值,C为所求。
思考:首先我们考虑旋转,矢量可以在空间平移;余弦与在各个轴上的投影相关;由于只关注旋转关系可以只从单位矢量角度考虑。
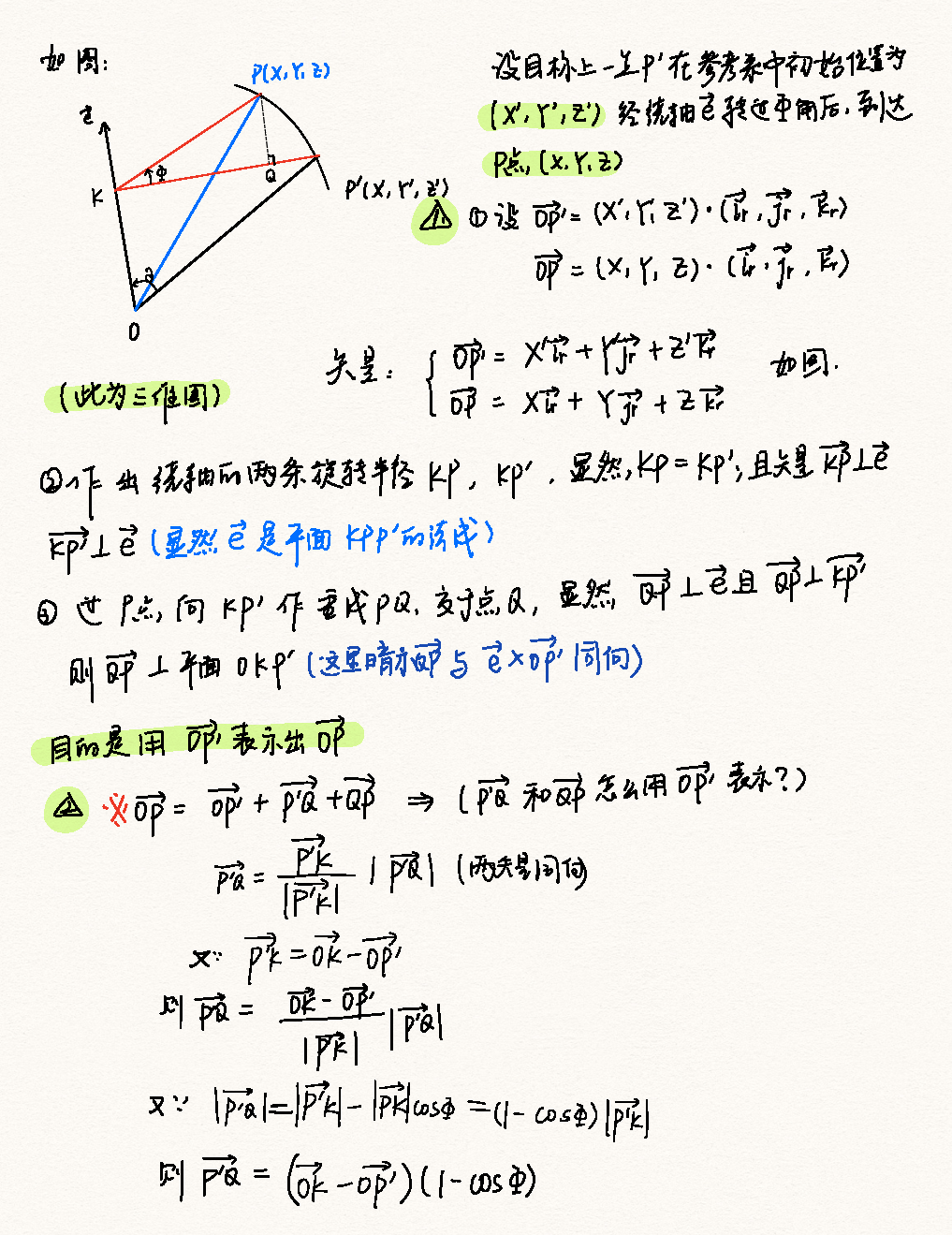
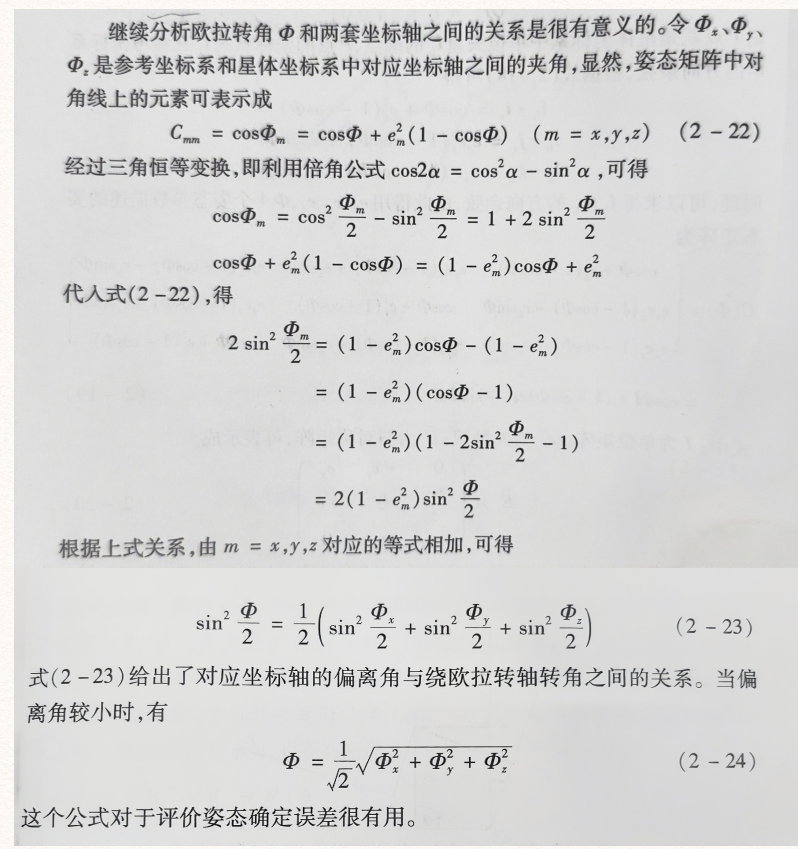
2.欧拉轴/角式
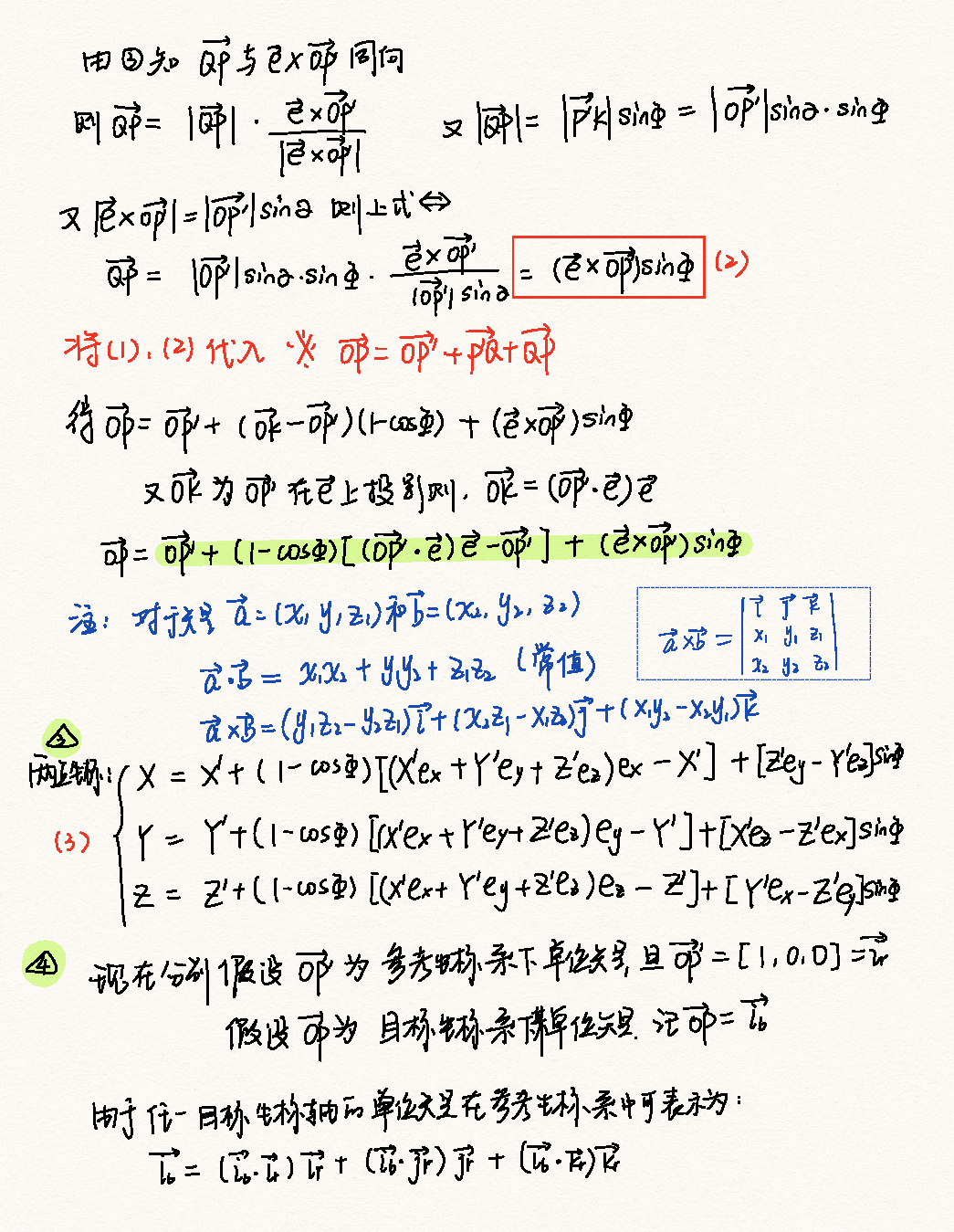
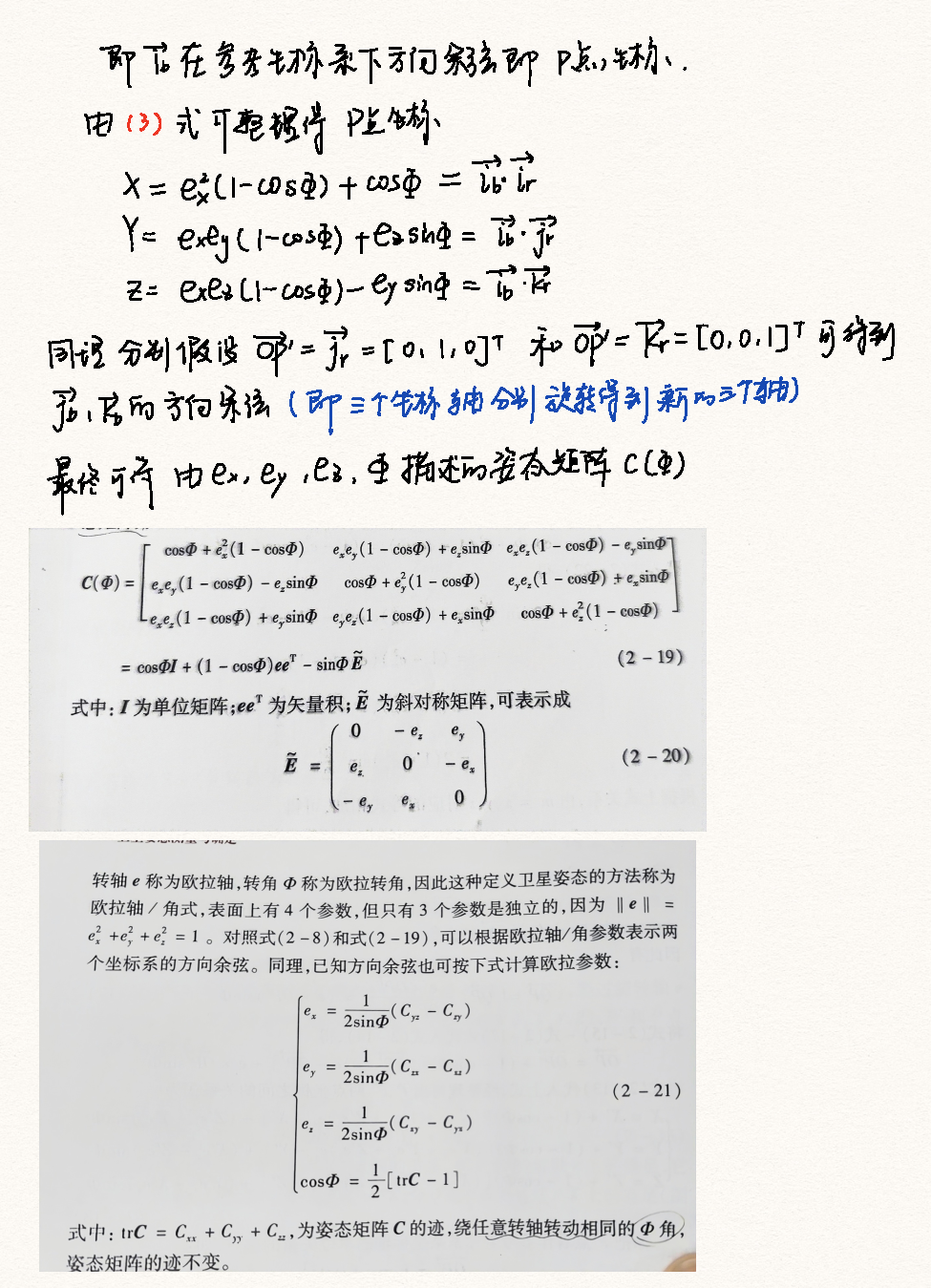
“欧拉定理:刚体绕固定点的任意位移(旋转),可由绕通过此点的某一固定轴转动一定角度得到。”这时姿态描述参数共有4个,即转轴的单位矢量在参考坐标系下的三个方向余弦ex、ey、ez,以及绕轴转动的转角Φ(需要知道绕谁转,转了多少)。对于矩阵C一定有特征值为1的特征矢量(C为旋转矩阵,则其行列式必为1),则必有单位矢量e满足:e=Ce(特征值求法:Qx=λx), 即刚体转轴方向的矢量e在目标坐标系和参考坐标系的分量相同。
【这里需要补充旋转矩阵以及正交矩阵相关概念:
(4 封私信) 旋转矩阵的行列式为什么等于1? - 知乎】
现在构架基于ex、ey、ez以及Φ的姿态描述:
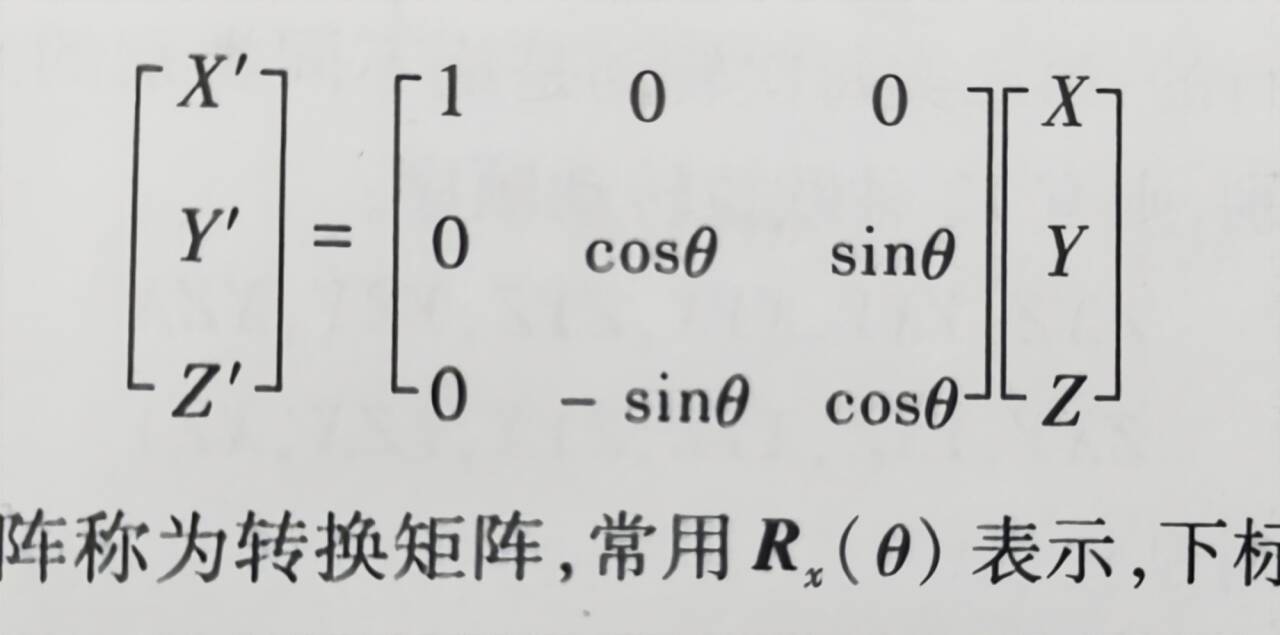
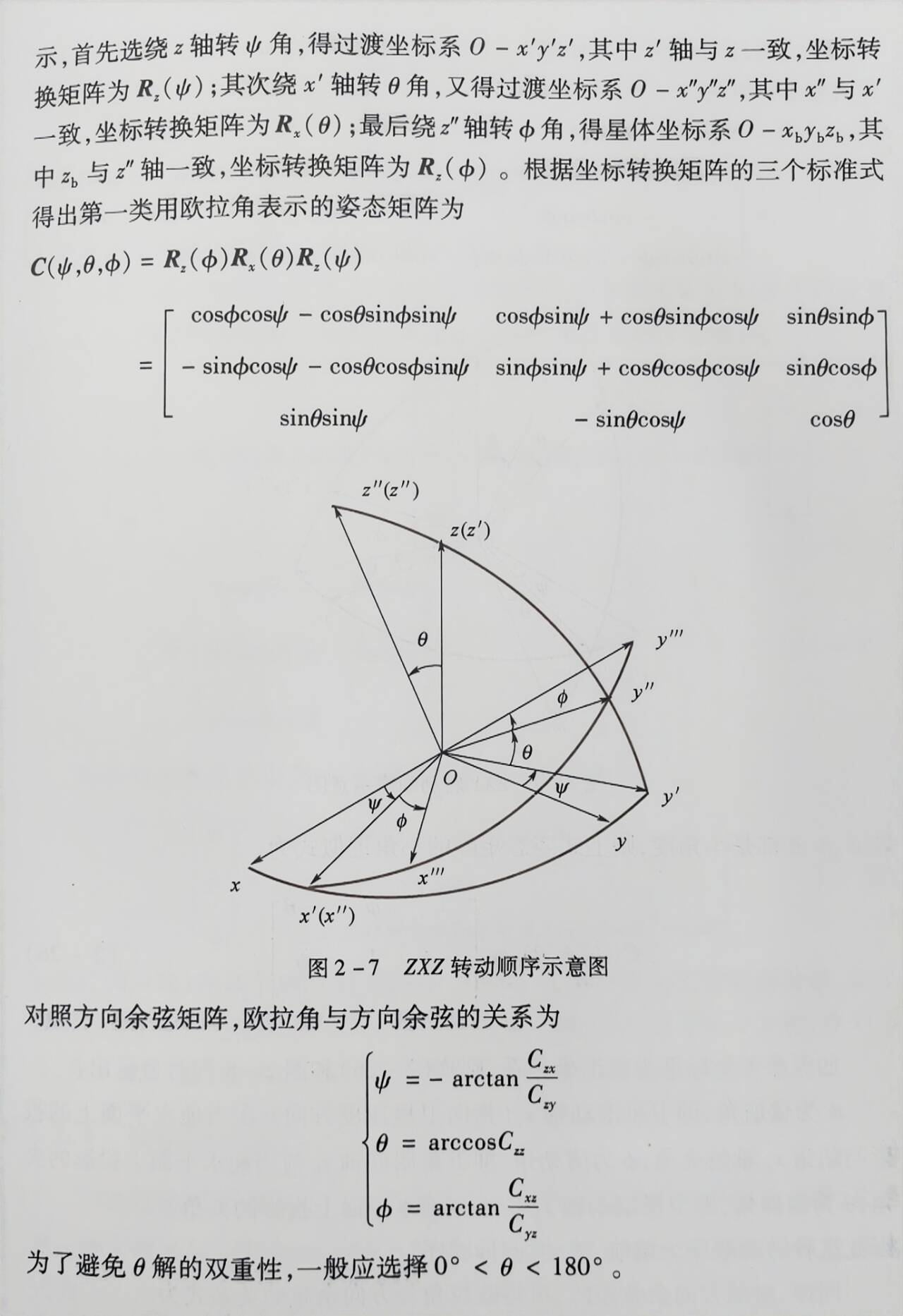
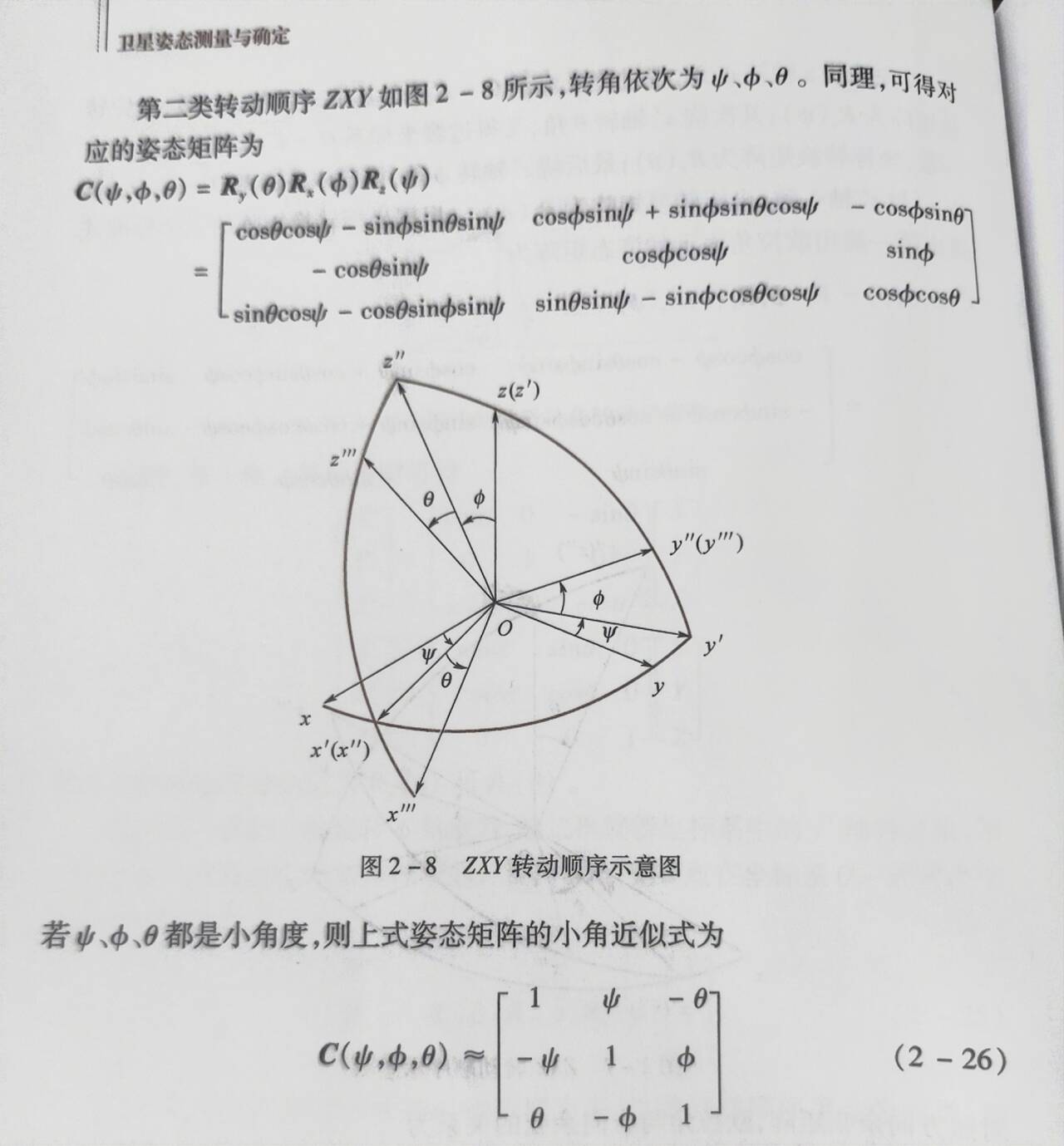
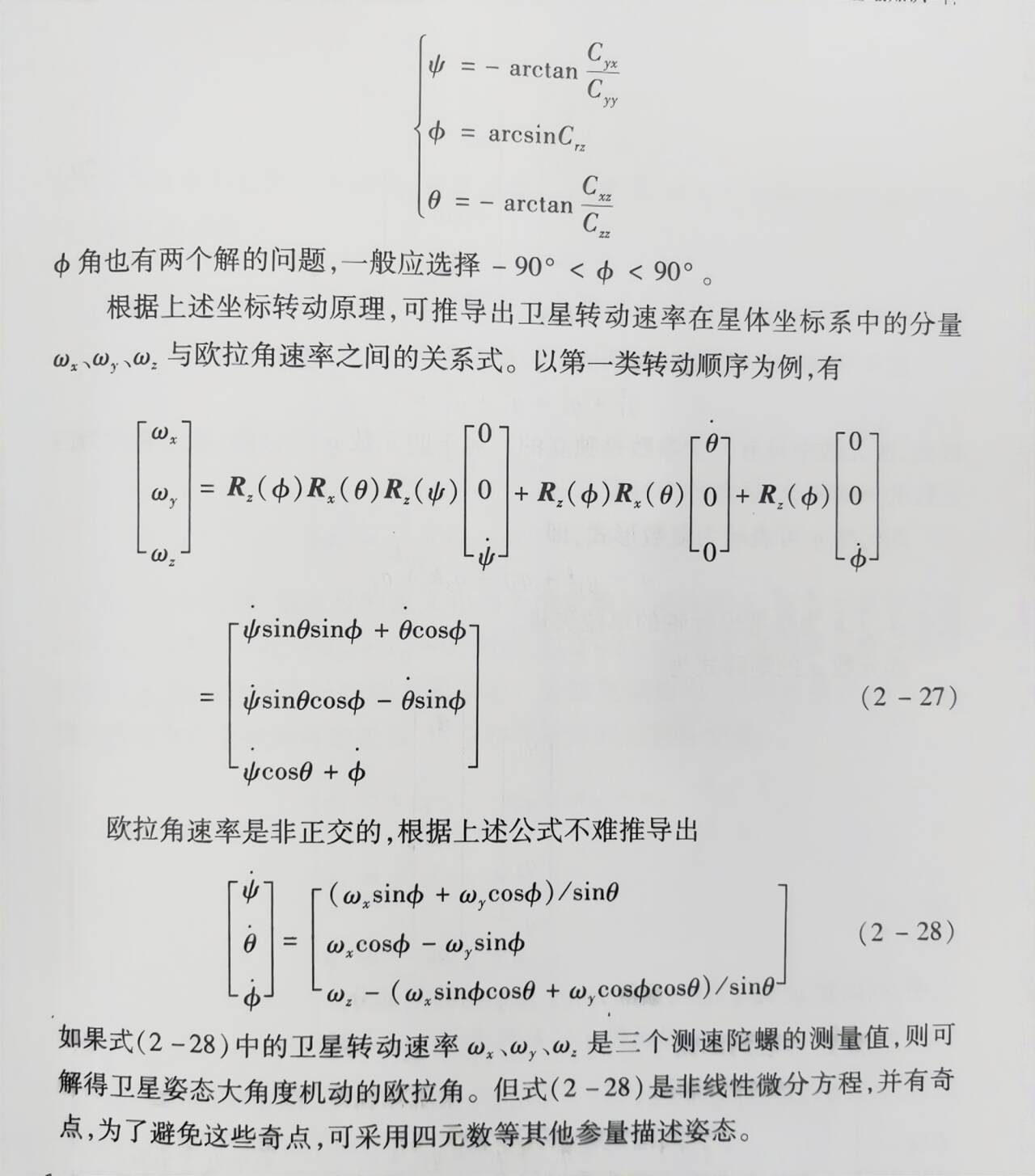
3.欧拉角式
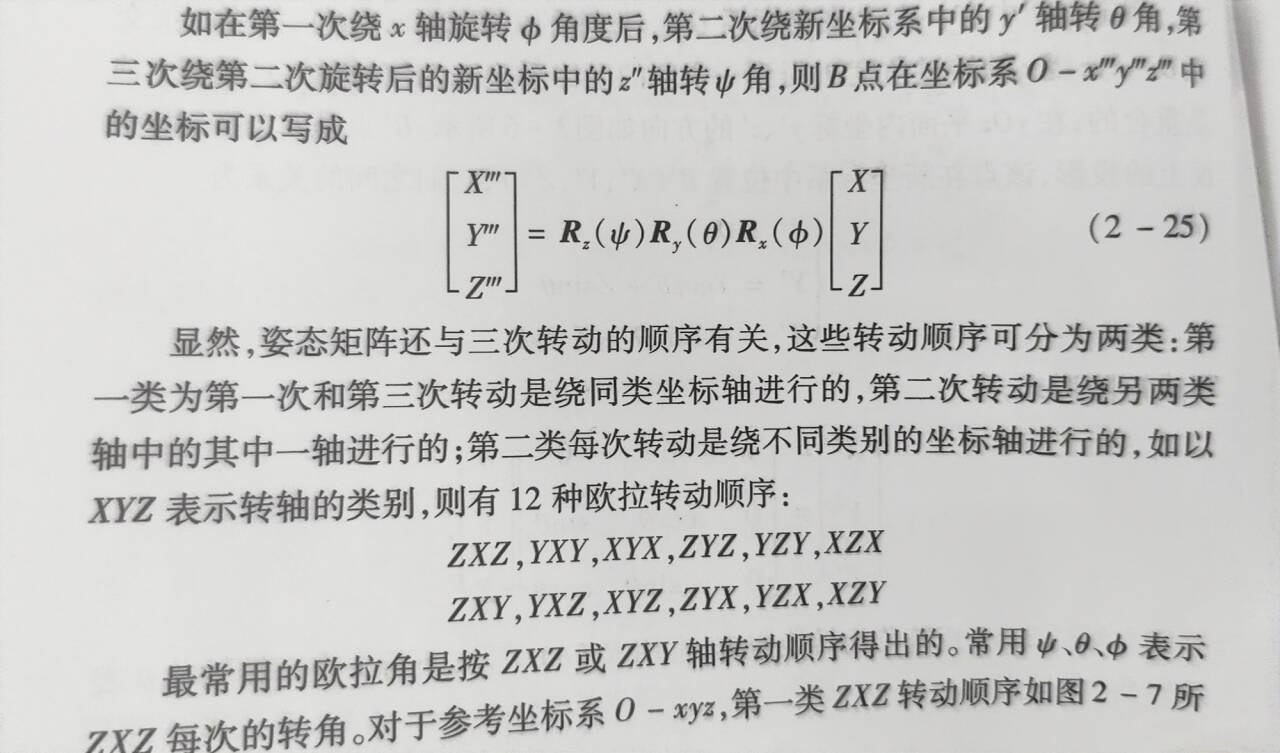
欧拉定理,刚体绕固定点的位移可以通过绕该点的若干次有限转动实现。将参考坐标系分别绕着自身三条坐标轴进行三次旋转,每次转动一个欧拉角,得到新的坐标系。这样姿态矩阵可由三次坐标转换矩阵的乘积。
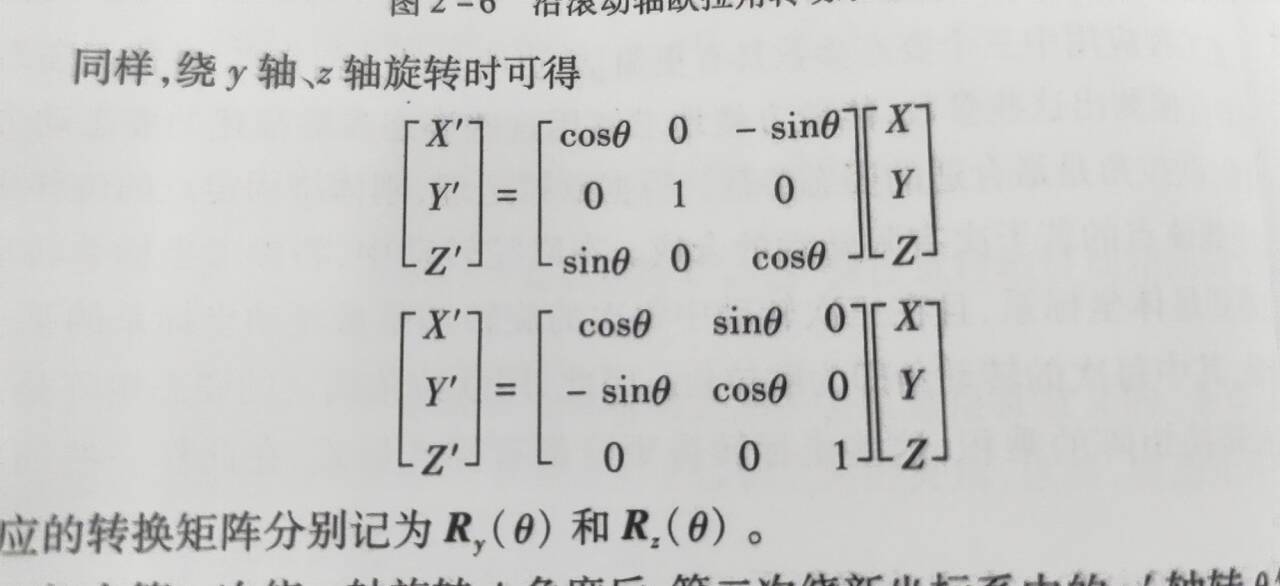
绕三个轴转动的旋转矩阵如下:(X,Y,Z)
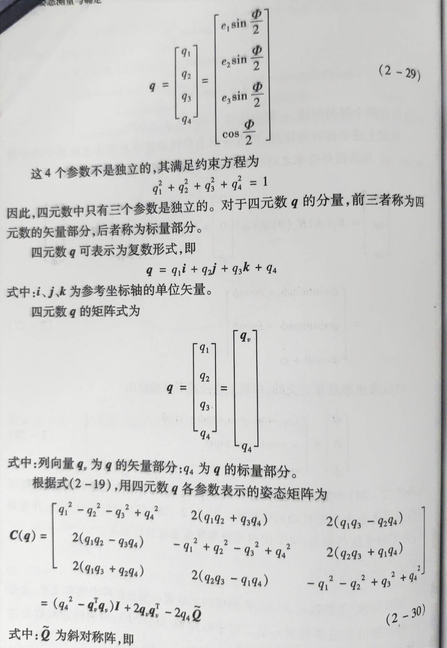
4.姿态四元数
用欧拉转轴/角参数组成的四元数表示姿态矩阵中的元素:
【注: 】
】
机器人导论之转移算子及欧拉角 - 知乎
姿态的三种描述方式——欧拉角、轴角、四元数_姿态 的 4个值-CSDN博客
其他参考链接:机器人学——位置与姿态描述_位姿-CSDN博客
主要参考教材《卫星姿态测量与确定》