md650场景联动
此实验以上两篇博文为基础,采集数据(HS1/HS2)大于设定值1(0.4)输出报警Q1,小于设定值2(0.3)复位报警输出Q1。
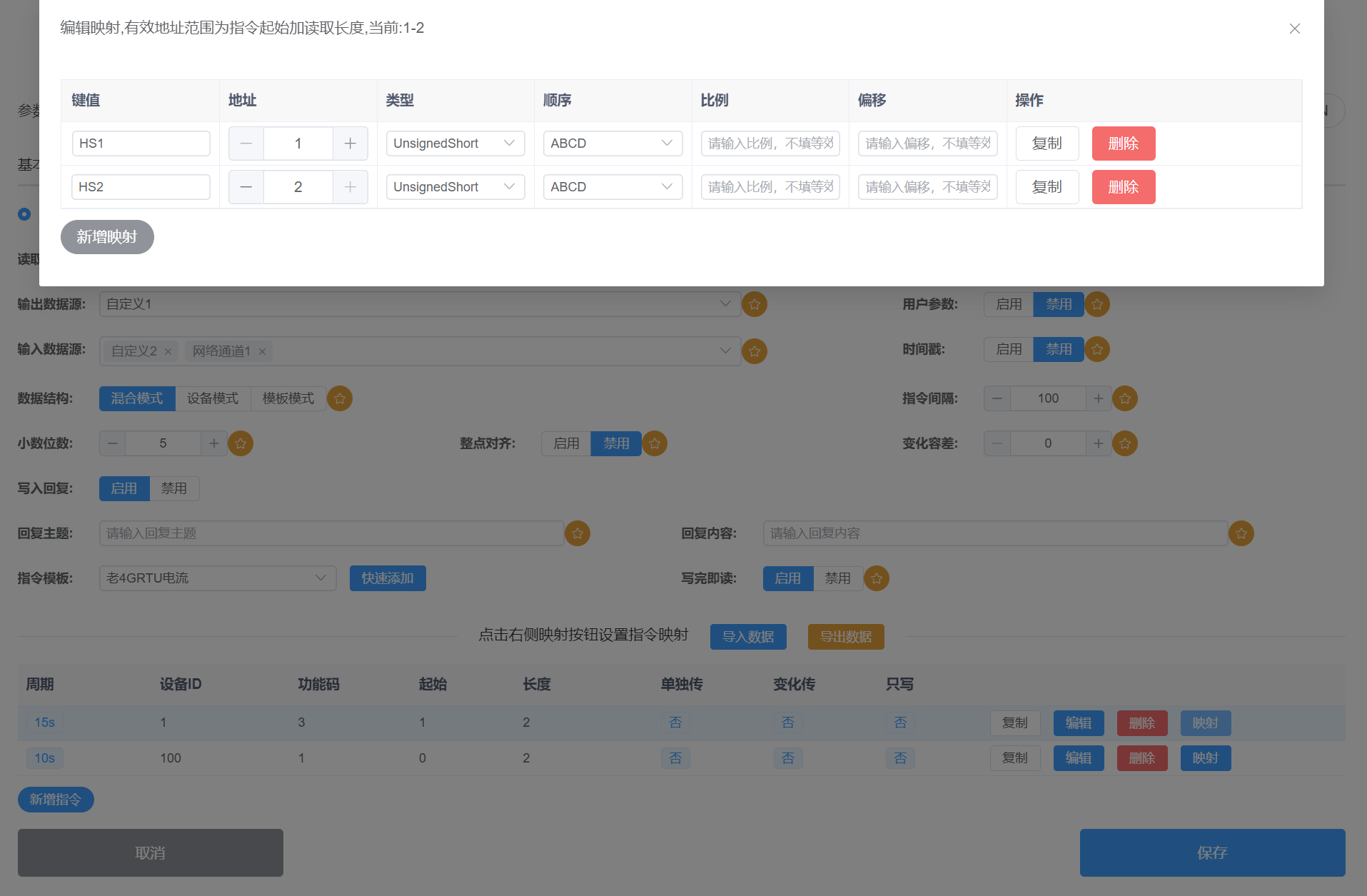
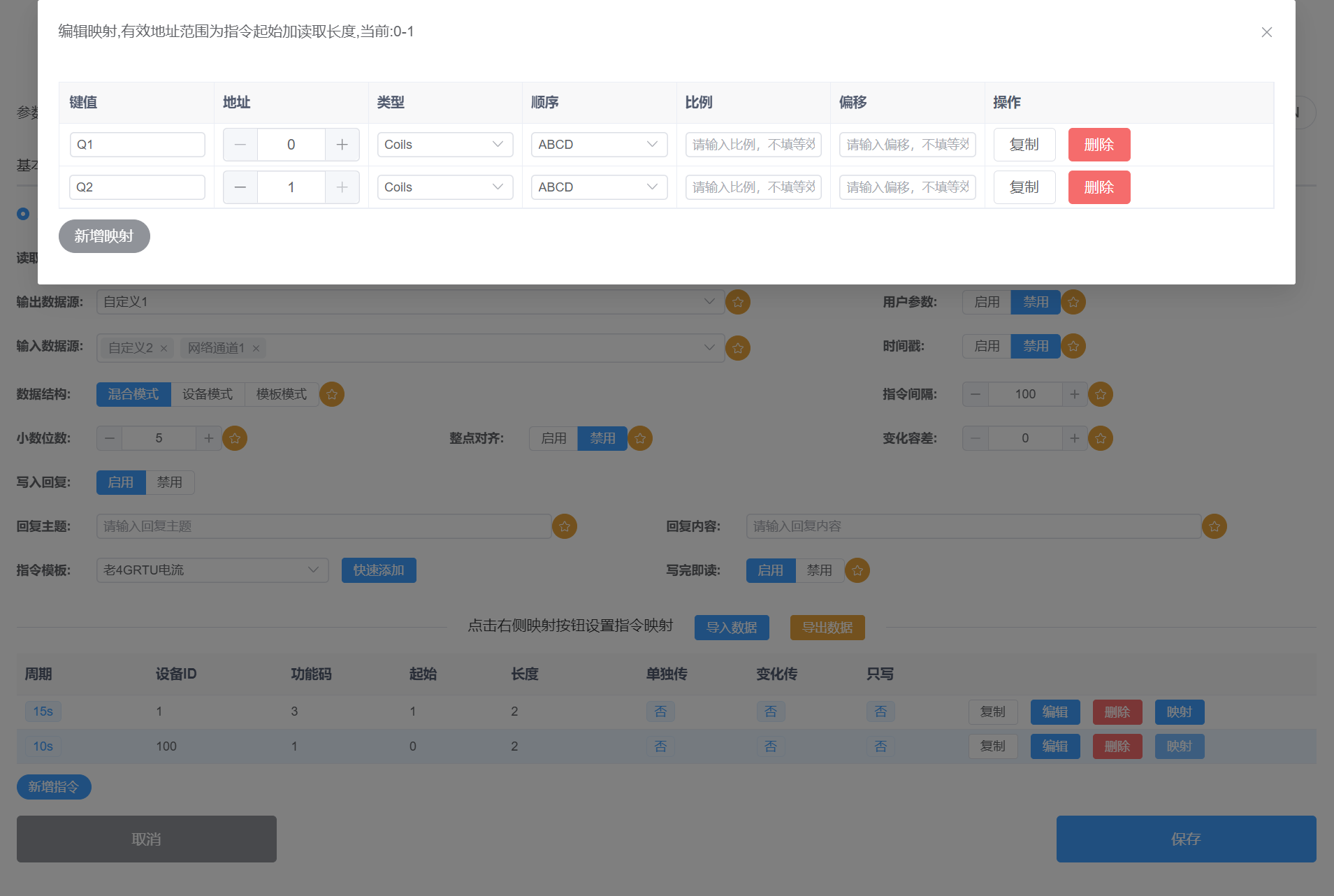
透传数据及映射:
本体继电器输出点
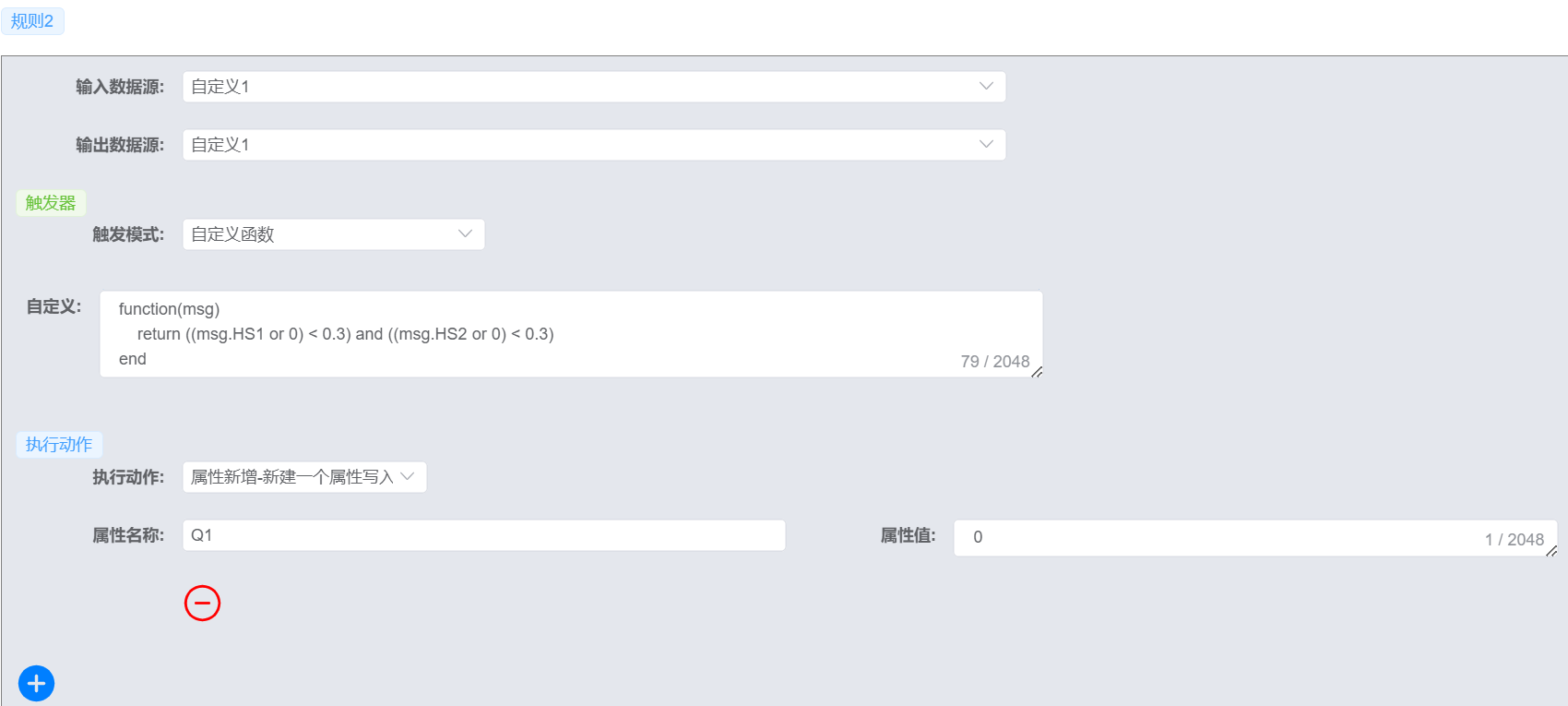
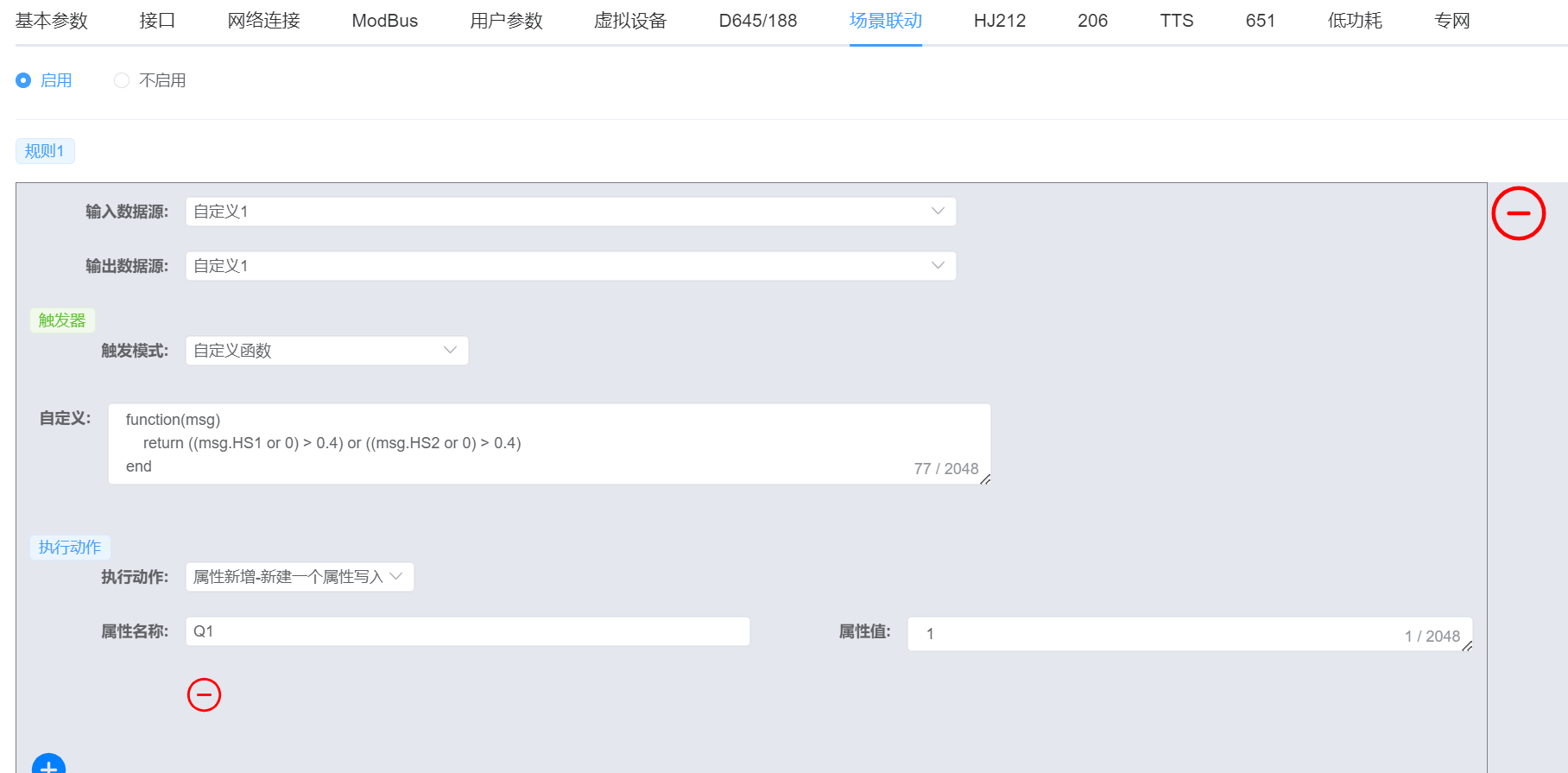
场景联动配置:
function(msg)
return ((msg.HS1 or 0) > 0.4) or ((msg.HS2 or 0) > 0.4)
end
- 如果
msg.HS1或msg.HS2中任意一个满足大于 0.4 的条件,则函数返回 true。 - 如果两者都不满足条件,则函数返回 false。
function(msg)
return ((msg.HS1 or 0) < 0.3) and ((msg.HS2 or 0) < 0.3)
end
- 只有当
msg.HS1和msg.HS2都满足小于 0.3 的条件时,函数才会返回 true。 - 如果其中任何一个不满足条件,则函数返回 false。