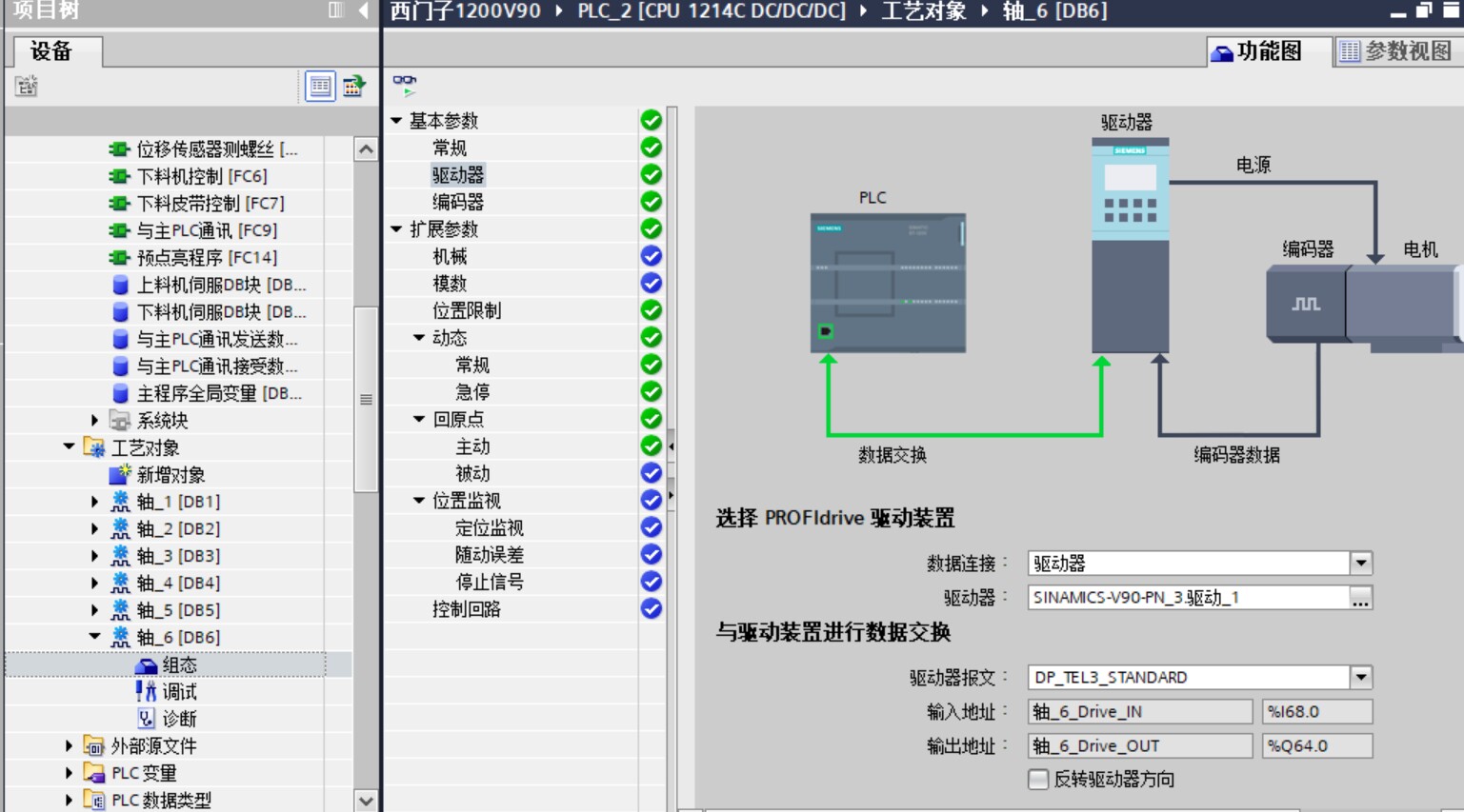
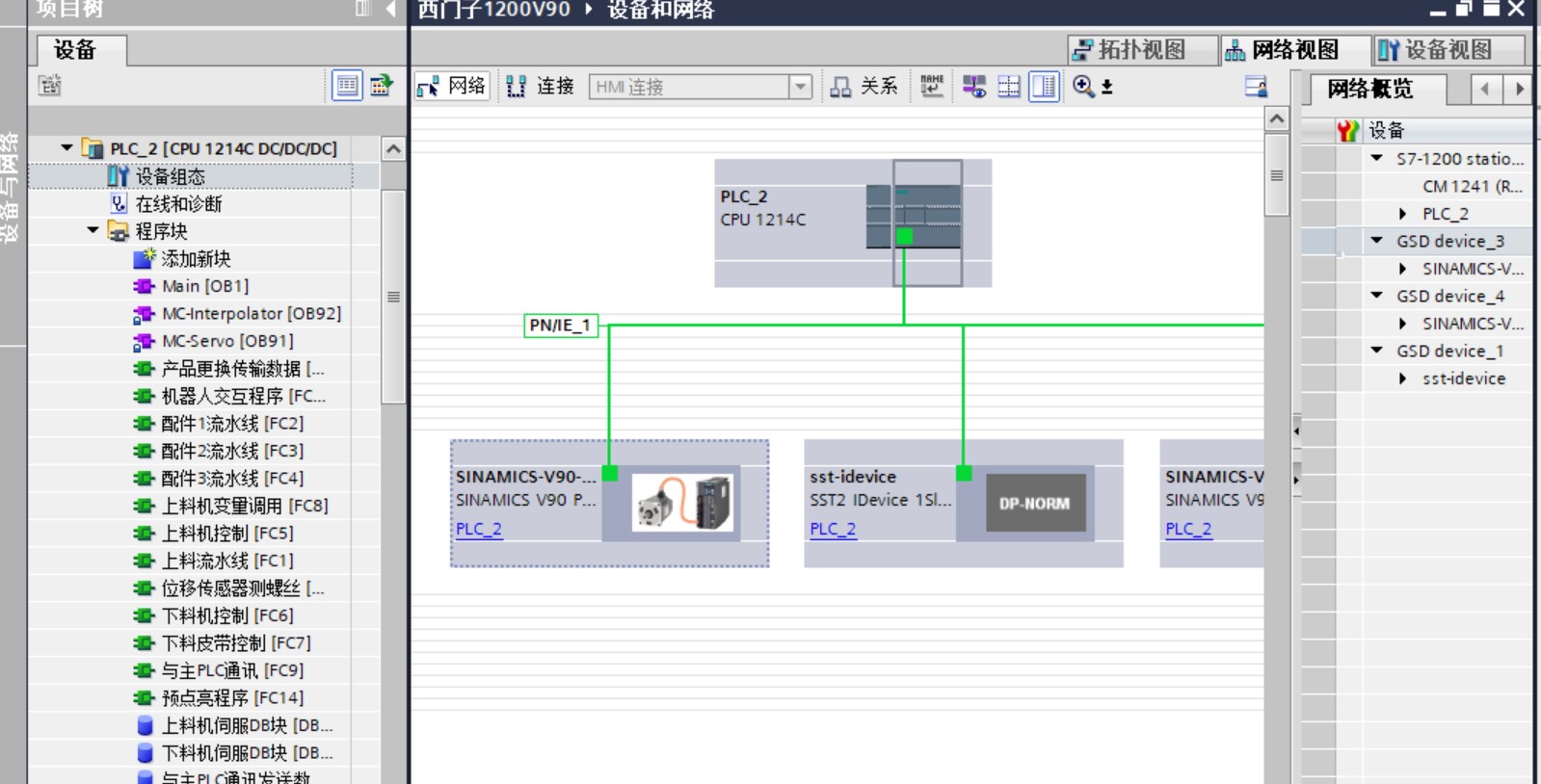
【无标题】西门子S7-1500PLC与西门子V90 PN伺服通讯控制项目程序项目程序,共有8轴,编码器信号直接输入到变频器内。
本文介绍了一个用于S7-1500 PLC与V90 PN伺服通讯控制的程序,主要功能包括编码器监控、错误处理、系统初始化、运动序列执行和HMI接口管理。程序通过工艺对象实时读取编码器的位置、速度和状态信息,并增加了编码器错误处理逻辑,确保在检测到错误时自动停止相关轴并记录错误信息。系统初始化阶段增加了编码器连接检查,确保所有编码器在启动前正常工作。运动序列执行过程中,程序实时监控编码器位置,确保实际位置与目标位置的偏差在允许范围内。HMI接口程序处理与上位机的通信,映射控制变量和状态反馈。错误处理程序监控系统状态,处理轴和编码器错误,并记录错误日志。程序还提供了轴组控制功能,支持多轴协同运动,并通过电子齿轮或电子凸轮实现同步控制。
1、程序概要
- 编码器监控:通过工艺对象读取编码器的位置、速度和状态信息,实现对编码器的直接监控。
- 编码器错误处理:增加了专门的编码器错误处理逻辑,当检测到编码器错误时,会自动停止相关轴并记录错误信息。
- 初始化流程:在系统初始化阶段增加了编码器连接检查,确保系统启动前所有编码器都正常工作。
- 运动序列中的编码器监控:在复杂运动序列执行过程中,增加了对编码器位置的实时监控,确保实际位置与目标位置的偏差在允许范围内。
使用时需要注意:
- 在 TIA Portal 中配置工艺对象时,需要正确设置编码器参数,包括类型、分辨率等。
- 编码器错误通常需要特定的清除方法,可能需要调用 V90 驱动器的特定功能块,本程序仅提供了基本框架。
- 编码器位置容差参数 (SeqEncoderTolerance) 需要根据实际系统精度要求进行调整。
2、程序代码
第一部分 S7-1500 PLC与V90 PN伺服通讯控制主程序
/
// S7-1500 PLC与V90 PN伺服通讯控制主程序
// 版本: V1.2
// 日期: 2025-05-22PROGRAM MainVAR// 轴控制数组AxisEnable : ARRAY[1..8] OF BOOL := [FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE];AxisHome : ARRAY[1..8] OF BOOL := [FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE];AxisJog1 : ARRAY[1..8] OF BOOL := [FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE];AxisJog2 : ARRAY[1..8] OF BOOL := [FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE];AxisMoveAbs : ARRAY[1..8] OF BOOL := [FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE];AxisMoveRel : ARRAY[1..8] OF BOOL := [FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE];AxisStop : ARRAY[1..8] OF BOOL := [FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE];// 定位参数数组Position : ARRAY[1..8] OF LREAL := [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0];Velocity : ARRAY[1..8] OF LREAL := [100.0, 100.0, 100.0, 100.0, 100.0, 100.0, 100.0, 100.0];Acceleration : ARRAY[1..8] OF LREAL := [1000.0, 1000.0, 1000.0, 1000.0, 1000.0, 1000.0, 1000.0, 1000.0];Deceleration : ARRAY[1..8] OF LREAL := [1000.0, 1000.0, 1000.0, 1000.0, 1000.0, 1000.0, 1000.0, 1000.0];Jerk : ARRAY[1..8] OF LREAL := [10000.0, 10000.0, 10000.0, 10000.0, 10000.0, 10000.0, 10000.0, 10000.0];// 轴状态反馈数组AxisEnabled : ARRAY[1..8] OF BOOL;AxisHomed : ARRAY[1..8] OF BOOL;AxisMoving : ARRAY[1..8] OF BOOL;AxisError : ARRAY[1..8] OF BOOL;ErrorID : ARRAY[1..8] OF INT;// 工艺对象引用数组AXIS_REF : ARRAY[1..8] OF Axis_TC;// 轴组控制GroupEnable : BOOL := FALSE; // 轴组使能GroupHome : BOOL := FALSE; // 轴组回零GroupMoveAbs : BOOL := FALSE; // 轴组绝对定位GroupMoveRel : BOOL := FALSE; // 轴组相对定位GroupStop : BOOL := FALSE; // 轴组停止// 组定位参数GroupPosition : ARRAY[1..8] OF LREAL := [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0];GroupVelocity : LREAL := 100.0; // 组速度GroupSyncType : INT := 0; // 同步类型(0=独立,1=电子齿轮,2=电子凸轮)GearRatio : ARRAY[1..7] OF LREAL := [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0]; // 齿轮比(主从轴)// 编码器信号监控(直接输入到变频器)EncoderPosition : ARRAY[1..8] OF LREAL; // 编码器位置反馈EncoderSpeed : ARRAY[1..8] OF LREAL; // 编码器速度反馈EncoderError : ARRAY[1..8] OF BOOL; // 编码器错误EncoderErrorID : ARRAY[1..8] OF INT; // 编码器错误IDEND_VAR// 轴控制循环FOR i := 1 TO 8 DO// 轴使能控制MC_Power(Axis := AXIS_REF[i],Enable := AxisEnable[i],Braking := FALSE,EnablePower := TRUE,CommandAborted => ,Error => AxisError[i],ErrorID => ErrorID[i],AxisEnabled => AxisEnabled[i]);// 轴回零控制IF AxisHome[i] AND NOT AxisHomed[i] THENMC_Home(Axis := AXIS_REF[i],Mode := 0,Position := 0.0,Velocity := Velocity[i] / 2,OverV := 100.0,Jerk := Jerk[i],CommandAborted => ,Error => AxisError[i],ErrorID => ErrorID[i],Busy => ,Done => AxisHomed[i]);END_IF;// 点动控制MC_Jog(Axis := AXIS_REF[i],Jog1 := AxisJog1[i],Jog2 := AxisJog2[i],Velocity1 := Velocity[i] / 2,Velocity2 := -Velocity[i] / 2,Acceleration := Acceleration[i],Deceleration := Deceleration[i],Jerk := Jerk[i],CommandAborted => ,Error => AxisError[i],ErrorID => ErrorID[i],Busy => AxisMoving[i]);// 绝对定位控制IF AxisMoveAbs[i] AND NOT AxisMoving[i] THENMC_MoveAbsolute(Axis := AXIS_REF[i],Position := Position[i],Velocity := Velocity[i],OverV := 100.0,Acceleration := Acceleration[i],Deceleration := Deceleration[i],Jerk := Jerk[i],PositioningMode := 0,Overlay := FALSE,CancelTraversing := FALSE,CommandAborted => ,Error => AxisError[i],ErrorID => ErrorID[i],Busy => AxisMoving[i],Done => );END_IF;// 相对定位控制IF AxisMoveRel[i] AND NOT AxisMoving[i] THENMC_MoveRelative(Axis := AXIS_REF[i],Distance := Position[i],Velocity := Velocity[i],OverV := 100.0,Acceleration := Acceleration[i],Deceleration := Deceleration[i],Jerk := Jerk[i],PositioningMode := 0,Overlay := FALSE,CancelTraversing := FALSE,CommandAborted => ,Error => AxisError[i],ErrorID => ErrorID[i],Busy => AxisMoving[i],Done => );END_IF;// 轴停止控制IF AxisStop[i] THENMC_Stop(Axis := AXIS_REF[i],Mode := 0,Deceleration := Deceleration[i],Jerk := Jerk[i],CommandAborted => ,Error => AxisError[i],ErrorID => ErrorID[i],Busy => AxisMoving[i]);END_IF;// 读取编码器反馈(通过工艺对象)EncoderPosition[i] := AXIS_REF[i].ACTUAL_POS;EncoderSpeed[i] := AXIS_REF[i].ACTUAL_VELO;EncoderError[i] := AXIS_REF[i].ERROR;EncoderErrorID[i] := AXIS_REF[i].ERRORID;END_FOR;// 轴组控制(简化版)IF GroupEnable THEN// 轴组使能逻辑FOR i := 1 TO 8 DOAxisEnable[i] := TRUE;END_FOR;END_IF;IF GroupHome THEN// 轴组回零逻辑FOR i := 1 TO 8 DOAxisHome[i] := TRUE;END_FOR;END_IF;// 组同步控制(示例:电子齿轮)IF GroupSyncType = 1 AND GroupMoveAbs THEN// 电子齿轮同步运动// 主轴(轴1)运动IF NOT AxisMoving[1] THENAxisMoveAbs[1] := TRUE;Position[1] := GroupPosition[1];Velocity[1] := GroupVelocity;END_IF;// 从轴跟随主轴运动FOR i := 2 TO 8 DOIF NOT AxisMoving[i] THENAxisMoveAbs[i] := TRUE;// 根据齿轮比计算从轴位置Position[i] := GroupPosition[1] * GearRatio[i-1];Velocity[i] := GroupVelocity * GearRatio[i-1];END_IF;END_FOR;END_IF;
END_PROGRAM 第二部分 系统初始化程序 - 项目启动时执行
// 系统初始化程序 - 项目启动时执行
PROGRAM System_InitializationVARInitComplete : BOOL := FALSE; // 初始化完成标志InitStep : INT := 0; // 初始化步骤InitTimer : TON; // 初始化定时器InitTime : TIME := T#30s; // 初始化超时时间(8轴延长)AxisInitCounter : INT := 0; // 轴初始化计数器END_VAR// 系统初始化序列IF NOT InitComplete THENInitTimer(IN := TRUE, PT := InitTime);CASE InitStep OF0: // 初始化基础参数InitBasicParameters();InitStep := 1;1: // 初始化工艺对象AxisInitCounter := AxisInitCounter + 1;IF AxisInitCounter <= 8 THENInitAxis(AxisInitCounter);ELSEInitStep := 2;AxisInitCounter := 0;END_IF;2: // 检查轴通信AxisInitCounter := AxisInitCounter + 1;IF AxisInitCounter <= 8 THENIF CheckAxisCommunication(AxisInitCounter) THEN// 轴通信正常,继续下一个轴IF AxisInitCounter = 8 THENInitStep := 3;END_IF;ELSEErrorMessage := '轴' + TO_STRING(AxisInitCounter) + '通信初始化失败';InitStep := 99; // 错误处理END_IF;END_IF;3: // 初始化轴参数AxisInitCounter := AxisInitCounter + 1;IF AxisInitCounter <= 8 THENSetAxisParameters(AxisInitCounter);IF AxisInitCounter = 8 THENInitStep := 4;END_IF;END_IF;4: // 检查编码器连接AxisInitCounter := AxisInitCounter + 1;IF AxisInitCounter <= 8 THENIF CheckEncoderConnection(AxisInitCounter) THEN// 编码器连接正常IF AxisInitCounter = 8 THENInitStep := 5;END_IF;ELSEErrorMessage := '轴' + TO_STRING(AxisInitCounter) + '编码器连接失败';InitStep := 99; // 错误处理END_IF;END_IF;5: // 初始化完成InitComplete := TRUE;InitTimer(IN := FALSE);Message := '系统初始化完成';99: // 错误处理ErrorMessage := '系统初始化失败';InitTimer(IN := FALSE);END_CASE;// 初始化超时处理IF InitTimer.Q THENInitComplete := TRUE;ErrorMessage := '系统初始化超时';END_IF;END_IF;
END_PROGRAM 第三部分 运动序列程序 - 实现复杂的多轴协同运动
// 运动序列程序 - 实现复杂的多轴协同运动
PROGRAM MotionSequencesVAR// 序列控制SeqRun : BOOL := FALSE; // 序列运行SeqStop : BOOL := FALSE; // 序列停止SeqID : INT := 0; // 序列IDSeqStep : INT := 0; // 序列步骤SeqStatus : INT := 0; // 序列状态(0=就绪,1=运行中,2=暂停,3=完成,4=错误)SeqTimer : TON; // 序列定时器// 序列参数SeqPosition : ARRAY[1..8, 1..10] OF LREAL; // 序列位置点(8轴,10个位置)SeqVelocity : ARRAY[1..10] OF LREAL; // 序列速度SeqDwellTime : ARRAY[1..10] OF TIME; // 序列停留时间SeqCurrentPoint : INT := 0; // 当前序列点// 序列执行过程中的编码器监控SeqEncoderPosRef : ARRAY[1..8, 1..10] OF LREAL; // 编码器位置参考值SeqEncoderTolerance : LREAL := 0.1; // 编码器位置容差(mm)SeqEncoderError : BOOL := FALSE; // 编码器位置误差END_VAR// 序列控制IF SeqRun AND SeqStatus = 0 THEN// 启动新序列SeqStatus := 1; // 运行中SeqStep := 1;SeqCurrentPoint := 1;// 记录初始编码器位置参考值FOR i := 1 TO 8 DOSeqEncoderPosRef[i, SeqCurrentPoint] := EncoderPosition[i];END_FOR;END_IF;IF SeqStop THEN// 停止序列SeqStatus := 0; // 就绪SeqStep := 0;SeqCurrentPoint := 0;// 停止所有轴FOR i := 1 TO 8 DOAxisStop[i] := TRUE;END_FOR;END_IF;// 序列执行IF SeqStatus = 1 THENCASE SeqStep OF1: // 移动到第一个位置点FOR i := 1 TO 8 DOPosition[i] := SeqPosition[i, SeqCurrentPoint];Velocity[i] := SeqVelocity[SeqCurrentPoint];AxisMoveAbs[i] := TRUE;END_FOR;SeqStep := 2;2: // 检查是否所有轴都到达位置FOR i := 1 TO 8 DOIF AxisMoving[i] THEN// 监控编码器位置与目标位置的偏差IF ABS(EncoderPosition[i] - SeqPosition[i, SeqCurrentPoint]) > SeqEncoderTolerance THENSeqEncoderError := TRUE;ErrorMessage := '轴' + TO_STRING(i) + '编码器位置偏差过大';END_IF;RETURN; // 仍有轴在运动,继续等待END_IF;END_FOR;// 所有轴都已到达位置SeqStep := 3;3: // 停留指定时间SeqTimer(IN := TRUE, PT := SeqDwellTime[SeqCurrentPoint]);IF SeqTimer.Q THENSeqTimer(IN := FALSE);SeqStep := 4;END_IF;4: // 记录当前编码器位置作为下一位置点的参考IF SeqCurrentPoint < 10 THENFOR i := 1 TO 8 DOSeqEncoderPosRef[i, SeqCurrentPoint+1] := EncoderPosition[i];END_FOR;END_IF;// 检查是否还有下一个位置点IF SeqCurrentPoint < 10 THENSeqCurrentPoint := SeqCurrentPoint + 1;SeqStep := 1; // 返回步骤1,移动到下一个位置点ELSESeqStatus := 3; // 序列完成END_IF;END_CASE;END_IF;// 序列错误处理FOR i := 1 TO 8 DOIF AxisError[i] AND SeqStatus = 1 THENSeqStatus := 4; // 序列错误ErrorMessage := '序列执行过程中轴' + TO_STRING(i) + '发生错误';END_IF;END_FOR;// 编码器错误处理IF SeqEncoderError AND SeqStatus = 1 THENSeqStatus := 4; // 序列错误FOR i := 1 TO 8 DOAxisStop[i] := TRUE; // 停止所有轴END_FOR;END_IF;
END_PROGRAM 第四部分 HMI接口程序 - 处理与上位机的通信
// HMI接口程序 - 处理与上位机的通信
PROGRAM HMI_InterfaceVAR// HMI输入变量数组HMIAxisEnable : ARRAY[1..8] OF BOOL;HMIAxisHome : ARRAY[1..8] OF BOOL;HMIAxisJog1 : ARRAY[1..8] OF BOOL;HMIAxisJog2 : ARRAY[1..8] OF BOOL;HMIAxisMoveAbs : ARRAY[1..8] OF BOOL;HMIAxisMoveRel : ARRAY[1..8] OF BOOL;HMIAxisStop : ARRAY[1..8] OF BOOL;HMIPosition : ARRAY[1..8] OF LREAL;HMIVelocity : ARRAY[1..8] OF LREAL;// HMI轴组控制变量HMIGroupEnable : BOOL;HMIGroupHome : BOOL;HMIGroupMoveAbs : BOOL;HMIGroupMoveRel : BOOL;HMIGroupStop : BOOL;HMIGroupPosition : ARRAY[1..8] OF LREAL;HMIGroupVelocity : LREAL;HMIGroupSyncType : INT;HMIGearRatio : ARRAY[1..7] OF LREAL;// HMI输出变量数组HMIAxisEnabled : ARRAY[1..8] OF BOOL;HMIAxisHomed : ARRAY[1..8] OF BOOL;HMIAxisMoving : ARRAY[1..8] OF BOOL;HMIAxisError : ARRAY[1..8] OF BOOL;HMIErrorID : ARRAY[1..8] OF INT;// 编码器反馈显示HMIEncoderPosition : ARRAY[1..8] OF LREAL;HMIEncoderSpeed : ARRAY[1..8] OF LREAL;HMIEncoderError : ARRAY[1..8] OF BOOL;HMIEncoderErrorID : ARRAY[1..8] OF INT;// 轴组状态HMIGroupStatus : INT; // 轴组状态(0=未就绪,1=就绪,2=运行中,3=错误)END_VAR// HMI输入映射到控制变量FOR i := 1 TO 8 DOAxisEnable[i] := HMIAxisEnable[i];AxisHome[i] := HMIAxisHome[i];AxisJog1[i] := HMIAxisJog1[i];AxisJog2[i] := HMIAxisJog2[i];AxisMoveAbs[i] := HMIAxisMoveAbs[i];AxisMoveRel[i] := HMIAxisMoveRel[i];AxisStop[i] := HMIAxisStop[i];Position[i] := HMIPosition[i];Velocity[i] := HMIVelocity[i];END_FOR;// 轴组控制映射GroupEnable := HMIGroupEnable;GroupHome := HMIGroupHome;GroupMoveAbs := HMIGroupMoveAbs;GroupMoveRel := HMIGroupMoveRel;GroupStop := HMIGroupStop;GroupPosition := HMIGroupPosition;GroupVelocity := HMIGroupVelocity;GroupSyncType := HMIGroupSyncType;GearRatio := HMIGearRatio;// 状态反馈映射到HMI输出FOR i := 1 TO 8 DOHMIAxisEnabled[i] := AxisEnabled[i];HMIAxisHomed[i] := AxisHomed[i];HMIAxisMoving[i] := AxisMoving[i];HMIAxisError[i] := AxisError[i];HMIErrorID[i] := ErrorID[i];// 编码器反馈HMIEncoderPosition[i] := EncoderPosition[i];HMIEncoderSpeed[i] := EncoderSpeed[i];HMIEncoderError[i] := EncoderError[i];HMIEncoderErrorID[i] := EncoderErrorID[i];END_FOR;// 计算轴组状态IF NOT GroupEnable THENHMIGroupStatus := 0; // 未就绪ELSE// 检查所有轴是否已使能FOR i := 1 TO 8 DOIF NOT AxisEnabled[i] THENHMIGroupStatus := 0; // 未就绪RETURN;END_IF;END_FOR;// 检查所有轴是否已回零FOR i := 1 TO 8 DOIF NOT AxisHomed[i] THENHMIGroupStatus := 0; // 未就绪RETURN;END_IF;END_FOR;// 检查是否有轴正在运动FOR i := 1 TO 8 DOIF AxisMoving[i] THENHMIGroupStatus := 2; // 运行中RETURN;END_IF;END_FOR;// 检查是否有轴错误FOR i := 1 TO 8 DOIF AxisError[i] THENHMIGroupStatus := 3; // 错误RETURN;END_IF;END_FOR;// 所有条件满足,轴组就绪HMIGroupStatus := 1; // 就绪END_IF;
END_PROGRAM 第五部分 错误处理程序 - 监控系统状态并处理错误
// 错误处理程序 - 监控系统状态并处理错误
PROGRAM Error_HandlingVARErrorCounter : ARRAY[1..8] OF INT := [0, 0, 0, 0, 0, 0, 0, 0];ErrorMessage : ARRAY[1..8] OF STRING(256);LastErrorTime : ARRAY[1..8] OF TIME := [T#0s, T#0s, T#0s, T#0s, T#0s, T#0s, T#0s, T#0s];ResetError : ARRAY[1..8] OF BOOL := [FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE];SystemError : BOOL; // 系统错误标志SystemErrorID : INT; // 系统错误IDSystemErrorMessage : STRING(256); // 系统错误消息ResetSystemError : BOOL := FALSE; // 复位系统错误// 编码器错误处理EncoderErrorCounter : ARRAY[1..8] OF INT := [0, 0, 0, 0, 0, 0, 0, 0];EncoderErrorMessage : ARRAY[1..8] OF STRING(256);ResetEncoderError : ARRAY[1..8] OF BOOL := [FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE, FALSE];END_VAR// 轴错误监控FOR i := 1 TO 8 DOIF AxisError[i] THENErrorCounter[i] := ErrorCounter[i] + 1;LastErrorTime[i] := T#0s;// 根据错误ID生成错误消息CASE ErrorID[i] OF16#0001: ErrorMessage[i] := '轴' + TO_STRING(i) + '未使能';16#0002: ErrorMessage[i] := '轴' + TO_STRING(i) + '使能错误';16#0003: ErrorMessage[i] := '轴' + TO_STRING(i) + '未回零';16#0004: ErrorMessage[i] := '轴' + TO_STRING(i) + '回零错误';16#0005: ErrorMessage[i] := '轴' + TO_STRING(i) + '运动错误';16#0006: ErrorMessage[i] := '轴' + TO_STRING(i) + '定位超差';16#0007: ErrorMessage[i] := '轴' + TO_STRING(i) + '过载';16#0008: ErrorMessage[i] := '轴' + TO_STRING(i) + '速度超差';16#0009: ErrorMessage[i] := '轴' + TO_STRING(i) + '位置超差';16#000A: ErrorMessage[i] := '轴' + TO_STRING(i) + '通信错误';ELSE: ErrorMessage[i] := '轴' + TO_STRING(i) + '未知错误';END_CASE;// 记录错误日志LogError(i, ErrorID[i], ErrorMessage[i]);// 设置系统错误SystemError := TRUE;SystemErrorID := ErrorID[i];SystemErrorMessage := ErrorMessage[i];END_IF;// 错误复位IF ResetError[i] THENAxisError[i] := FALSE;ErrorCounter[i] := 0;ErrorMessage[i] := '';END_IF;END_FOR;// 编码器错误监控FOR i := 1 TO 8 DOIF EncoderError[i] THENEncoderErrorCounter[i] := EncoderErrorCounter[i] + 1;// 根据编码器错误ID生成错误消息CASE EncoderErrorID[i] OF16#0101: EncoderErrorMessage[i] := '轴' + TO_STRING(i) + '编码器通信中断';16#0102: EncoderErrorMessage[i] := '轴' + TO_STRING(i) + '编码器数据错误';16#0103: EncoderErrorMessage[i] := '轴' + TO_STRING(i) + '编码器超速';16#0104: EncoderErrorMessage[i] := '轴' + TO_STRING(i) + '编码器电池电量低';16#0105: EncoderErrorMessage[i] := '轴' + TO_STRING(i) + '编码器参数错误';ELSE: EncoderErrorMessage[i] := '轴' + TO_STRING(i) + '编码器未知错误';END_CASE;// 记录编码器错误日志LogEncoderError(i, EncoderErrorID[i], EncoderErrorMessage[i]);// 设置系统错误SystemError := TRUE;SystemErrorID := EncoderErrorID[i];SystemErrorMessage := EncoderErrorMessage[i];// 发生编码器错误时停止轴运动AxisStop[i] := TRUE;END_IF;// 编码器错误复位IF ResetEncoderError[i] THEN// 注意: 编码器错误通常需要硬件复位或特定的清除方法// 此处仅作为示例,实际应用中可能需要调用特定的系统功能块ResetEncoderError[i] := FALSE;END_IF;END_FOR;// 系统错误复位IF ResetSystemError THENSystemError := FALSE;SystemErrorID := 0;SystemErrorMessage := '';// 同时复位所有轴错误FOR i := 1 TO 8 DOResetError[i] := TRUE;ResetEncoderError[i] := TRUE;END_FOR;END_IF;// 轴状态监控FOR i := 1 TO 8 DOIF AxisEnabled[i] AND NOT AxisHomed[i] THEN// 轴已使能但未回零,发出警告WarningMessage[i] := '轴' + TO_STRING(i) + '已使能但未回零';END_IF;END_FOR;
END_PROGRAM