不同类型桥梁的无人机检测内容及技术难度
不同类型桥梁的无人机检测内容及技术难度
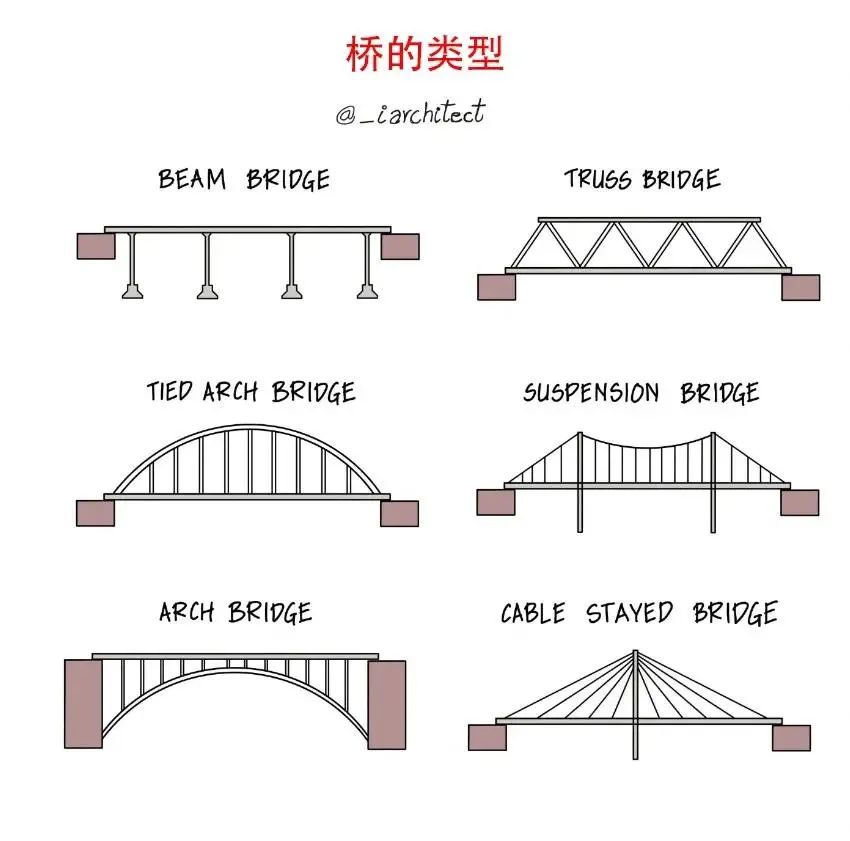
无人机桥梁检测的难度因桥梁类型、结构特点和所处环境的不同而存在显著差异。以下是针对梁桥、拱桥、斜拉桥、悬索桥等主要桥梁类型的无人机检测难度分析:

1. 梁桥(简支梁、连续梁)
检测难度:★★★☆☆(中等)
主要挑战:
-
桥底检测盲区:梁桥底部通常为平面或箱梁结构,无人机需在无GPS信号环境下飞行,依赖SLAM定位技术
-
裂缝识别精度:混凝土梁桥易出现裂缝,需高分辨率相机捕捉0.2mm级裂缝。
-
支座检查:需近距离拍摄支座位移、锈蚀情况,但无人机易受气流影响,稳定性要求高。
解决方案:
-
采用自动航线规划,确保覆盖梁底、支座等关键部位。
-
结合AI裂缝识别,提高病害检测效率。

2. 拱桥(石拱桥、钢拱桥)
检测难度:★★★★☆(较高)
主要挑战:
-
拱肋复杂结构:拱桥的曲面结构使无人机飞行路径复杂化,需精确避障。
-
拱脚与拱顶检测:拱脚易受水侵蚀,拱顶需高精度拍摄,但无人机悬停稳定性要求极高。
-
吊杆/系杆检查:部分拱桥有吊杆,需无人机灵活调整角度拍摄锈蚀、断裂情况。
解决方案:
-
使用多旋翼无人机+激光雷达,生成拱桥3D模型辅助检测。
-
结合红外热成像检测拱肋内部空洞。

3. 斜拉桥
检测难度:★★★★★(极高)
主要挑战:
-
斜拉索检测:拉索直径小、长度长,无人机需近距离飞行,易受风力影响。
-
索塔高空作业:塔顶检测需无人机在强风环境下保持稳定,且GPS信号可能丢失。
-
锚固区隐蔽病害:斜拉索锚固处易锈蚀,但结构复杂,无人机难以全面覆盖。
解决方案:
-
无人机+爬索机器人协同,如江西的“高墩机器人”辅助检测索塔。
-
超视距(BVLOS)飞行,如美国北卡罗来纳州采用超视距无人机检测斜拉桥。

4. 悬索桥
检测难度:★★★★★(极高)
主要挑战:
-
主缆检测:主缆直径大但表面PE护套易老化,无人机需沿缆索飞行,受风载影响大。
-
吊索检查:吊索振动剧烈,无人机拍摄难度高,需高帧率相机捕捉细微裂纹。
-
桥塔高空检测:悬索桥塔高(如杭州湾跨海大桥),无人机需在强风下稳定悬停。
解决方案:
-
系留无人机延长续航,如跨海大桥采用系留式无人机检测主缆。
-
激光雷达扫描主缆变形,结合AI分析病害趋势。
5. 跨海大桥/特殊环境桥梁
检测难度:★★★★★(极高)
主要挑战:
-
强风与盐雾腐蚀:跨海大桥环境恶劣,无人机需防水、抗风(如6级风以上飞行)。
-
水下基础检测:桥墩水下部分需配合ROV(水下机器人),无人机仅能辅助水面以上检测。
-
长距离通信:跨海大桥跨度大,无人机需5G或卫星通信保障数据回传。
解决方案:
-
氢燃料电池无人机提升续航,适应长距离检测。
-
多机协同,如杭州湾跨海大桥采用无人机编队分区域检测。
总结:不同类型桥梁检测难度对比
| 桥梁类型 | 主要检测难点 | 无人机适用性 | 推荐技术方案 |
|---|---|---|---|
| 梁桥 | 桥底盲区、裂缝识别 | ★★★☆☆ | 高分辨率相机+AI分析 |
| 拱桥 | 拱肋曲面、吊杆锈蚀 | ★★★★☆ | 激光雷达+红外热成像 |
| 斜拉桥 | 斜拉索、索塔高空检测 | ★★★★★ | 超视距飞行+爬索机器人 |
| 悬索桥 | 主缆老化、吊索振动 | ★★★★★ | 系留无人机+激光雷达 |
| 跨海大桥 | 强风、盐雾、水下检测 | ★★★★★ | 氢燃料电池+多机协同 |