2024年ASOC SCI2区TOP,多机制群优化算法+多风场输电线路巡检中多无人机任务分配与路径规划,深度解析+性能实测
目录
- 1.摘要
- 2.考虑风场影响的多无人机任务分配
- 3.基于双向蚁群和离散蜜獾算法求解多无人机任务分配问题(BACOHBA)
- 4.考虑风场的多无人机路径规划
- 5.结果展示
- 6.参考文献
- 7.代码获取
- 8.读者交流
1.摘要
随着电力系统规模的不断扩大,复杂环境下的电力线路及设施的巡检与维护面临更大挑战。目前,基于无人机的输电线路巡检技术受到越来越多的研究关注,多无人机的任务分配与路径规划是两个关键问题。本文首先构建了一个三维的巡检环境模型,并考虑山地环境中多个风场的影响因素进行建模与测量。针对多无人机任务分配问题,定义了一个考虑风场影响的多指标混合代价函数,并提出改进的双向蚁群-离散蜜獾算法(BACOHBA)进行求解。针对多风场条件下的多无人机路径规划问题,提出改进的蜜獾-果蝇算法(HBAFOA)进行优化求解。

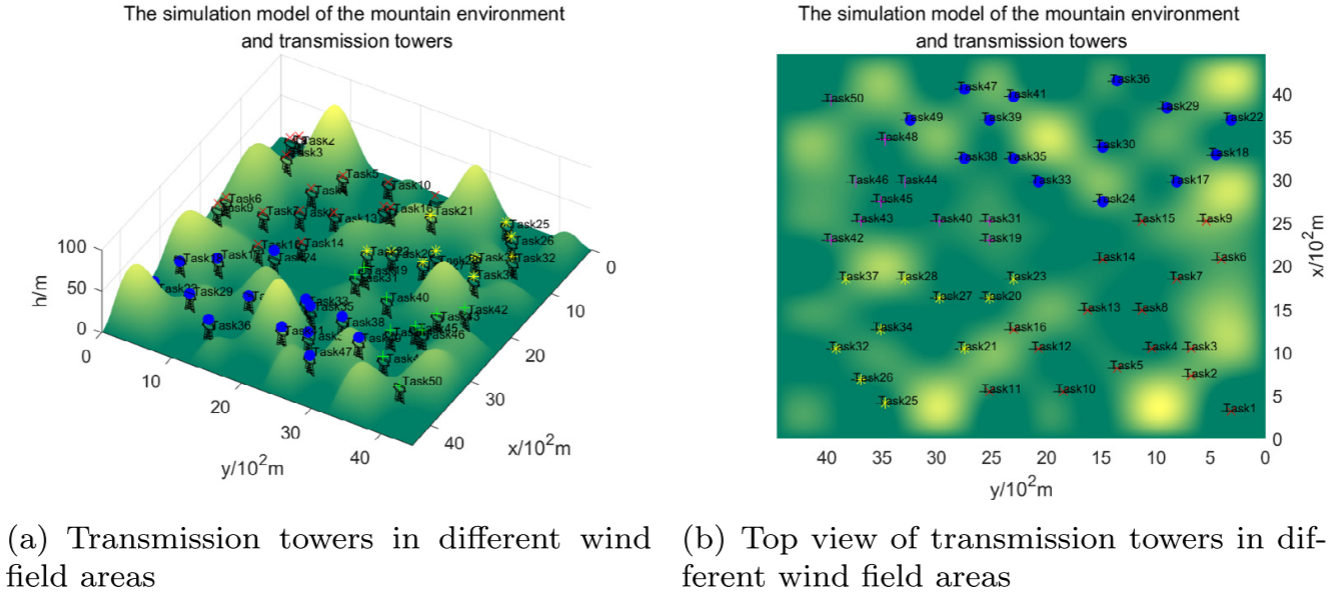
2.考虑风场影响的多无人机任务分配
考虑风场影响的多无人机任务分配问题可描述如下:在一张被划分为多个风场区域的地图上分布有 n n n个任务点,假设在执行任务期间,各风场区域内的风力保持不变。共有 m m m架无人机从同一起点出发,访问地图上的多个任务点,并最终返回起点。在此过程中,每个任务点只能被访问一次,不能重复访问,同时各无人机需满足自身的约束条件,从而为每架无人机获得最优的任务访问序列。
考虑多旅行商问题(MTSP)数学模型:
m i n F = ∑ i = 1 n ∑ j = 1 n C i j X i j minF=\sum_{i=1}^n\sum_{j=1}^nC_{ij}X_{ij} minF=i=1∑nj=1∑nCijXij
s.t. { ∑ i = q 2 q n X i j = 1 j ∈ Q N ∑ j = q 2 q n X i j = 1 i ∈ Q N ∑ i = q 2 q n ∑ j = q 2 q n X i j = n − m − 1 \begin{equation*} \text{s.t.} \left\{ \begin{aligned} &\sum_{i=q_2}^{q_n} X_{ij} = 1 \quad && j \in \mathcal{Q}_N \\ &\sum_{j=q_2}^{q_n} X_{ij} = 1 \quad && i \in \mathcal{Q}_N \\ &\sum_{i=q_2}^{q_n} \sum_{j=q_2}^{q_n} X_{ij} = n - m - 1 \end{aligned} \right. \end{equation*} s.t.⎩ ⎨ ⎧i=q2∑qnXij=1j=q2∑qnXij=1i=q2∑qnj=q2∑qnXij=n−m−1j∈QNi∈QN
对于飞行成本 C i j C_{ij} Cij,两个任务点之间的成本函数定义为:
{ F Amin ( i , j ) = ω 1 c 1 C Adist ( i , j ) + ω 2 c 2 C Atime ( i , j ) + ω 3 c 3 C Achange ( i , j ) ω 1 + ω 2 + ω 3 = 1 \begin{equation*} \left\{ \begin{aligned} F_{\text{Amin}}(i,j) &= \omega_1 c_1 C_{\text{Adist}}(i,j) + \omega_2 c_2 C_{\text{Atime}}(i,j) + \omega_3 c_3 C_{\text{Achange}}(i,j) \\ \omega_1 + \omega_2 + \omega_3 &= 1 \end{aligned} \right. \end{equation*} {FAmin(i,j)ω1+ω2+ω3=ω1c1CAdist(i,j)+ω2c2CAtime(i,j)+ω3c3CAchange(i,j)=1
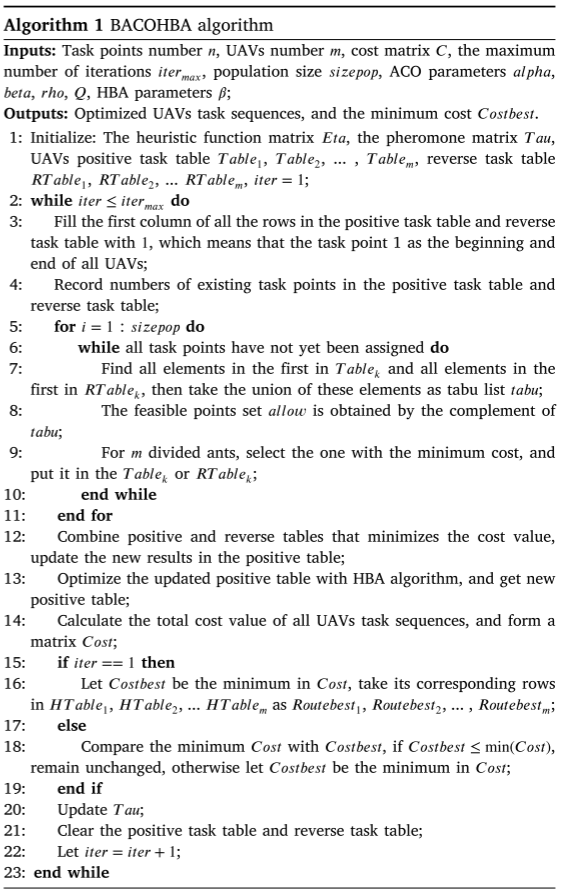
3.基于双向蚁群和离散蜜獾算法求解多无人机任务分配问题(BACOHBA)
离散蜜獾算法
在多无人机任务分配问题中,多架无人机对应的不同任务执行序列被组合起来,作为蜜獾的位置,即一个解的表示。假设在一个包含10个任务点、3架无人机的任务场景中,所有无人机均从任务点1出发,并最终返回到任务点1,且所有任务点在整个过程中不得被重复访问。
Route 1 = { 1 , 2 , 10 } Route 2 = { 1 , 3 , 4 , 7 } Route 3 = { 1 , 5 , 6 , 8 , 9 } \begin{equation*} \begin{aligned} \text{Route}_1 &= \{1, 2, 10\} \\ \text{Route}_2 &= \{1, 3, 4, 7\} \\ \text{Route}_3 &= \{1, 5, 6, 8, 9\} \end{aligned} \end{equation*} Route1Route2Route3={1,2,10}={1,3,4,7}={1,5,6,8,9}
去掉共同的起始点1后进行组合得到 X = { 2 , 10 , 3 , 4 , 7 , 5 , 6 , 8 , 9 } X=\{2,10,3,4,7,5,6,8,9\} X={2,10,3,4,7,5,6,8,9},对应解决方案(蜜獾的位置)。
蜜獾之间的距离被定义为一组序列转换操作,即将一个解中需要经过的中间任务点,通过若干变换操作,从该解中的一个位置转换到另一个解中的对应位置。假设存在两个蜜獾,其位置:
X 1 = { 2 , 3 , 5 , 10 , 4 , 6 , 7 , 8 , 9 } X 2 = { 2 , 3 , 4 , 5 , 7 , 6 , 10 , 9 , 8 } \begin{array} {c}X_1=\{2,3,5,10,4,6,7,8,9\} \\ X_2=\{2,3,4,5,7,6,10,9,8\} \end{array} X1={2,3,5,10,4,6,7,8,9}X2={2,3,4,5,7,6,10,9,8}
两只蜜獾之间的距离为:
D i s t = { ⟨ 3 , 4 ⟩ , ⟨ 5 , 7 ⟩ , ⟨ 7 , 6 ⟩ , ⟨ 10 , 9 ⟩ } Dist=\{\langle3,4\rangle,\langle5,7\rangle,\langle7,6\rangle,\langle10,9\rangle\} Dist={⟨3,4⟩,⟨5,7⟩,⟨7,6⟩,⟨10,9⟩}
其中, ⟨ i , j ⟩ \langle i,j\rangle ⟨i,j⟩是交换算子,表示将处于其他位置的点 j j j移动到紧跟在点 i i i之后位置。
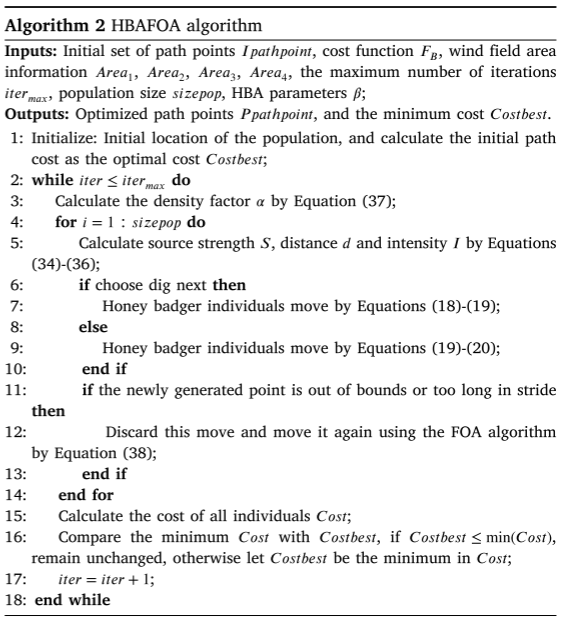
4.考虑风场的多无人机路径规划
在对多架无人机进行合理的任务分配后,每架无人机将得到自己的任务序列,并根据该任务序列依次检查任务点。在进行无人机路径规划时,将飞行距离、飞行时间、飞行高度差和飞行能耗作为成本指标:
F B m i n = ∑ i = 1 m ∑ j = 1 n i ∑ k = 1 n p i j − 1 f B F_{Bmin}=\sum_{i=1}^m\sum_{j=1}^{n_i}\sum_{k=1}^{n_{pij}-1}f_B FBmin=i=1∑mj=1∑nik=1∑npij−1fB
5.结果展示
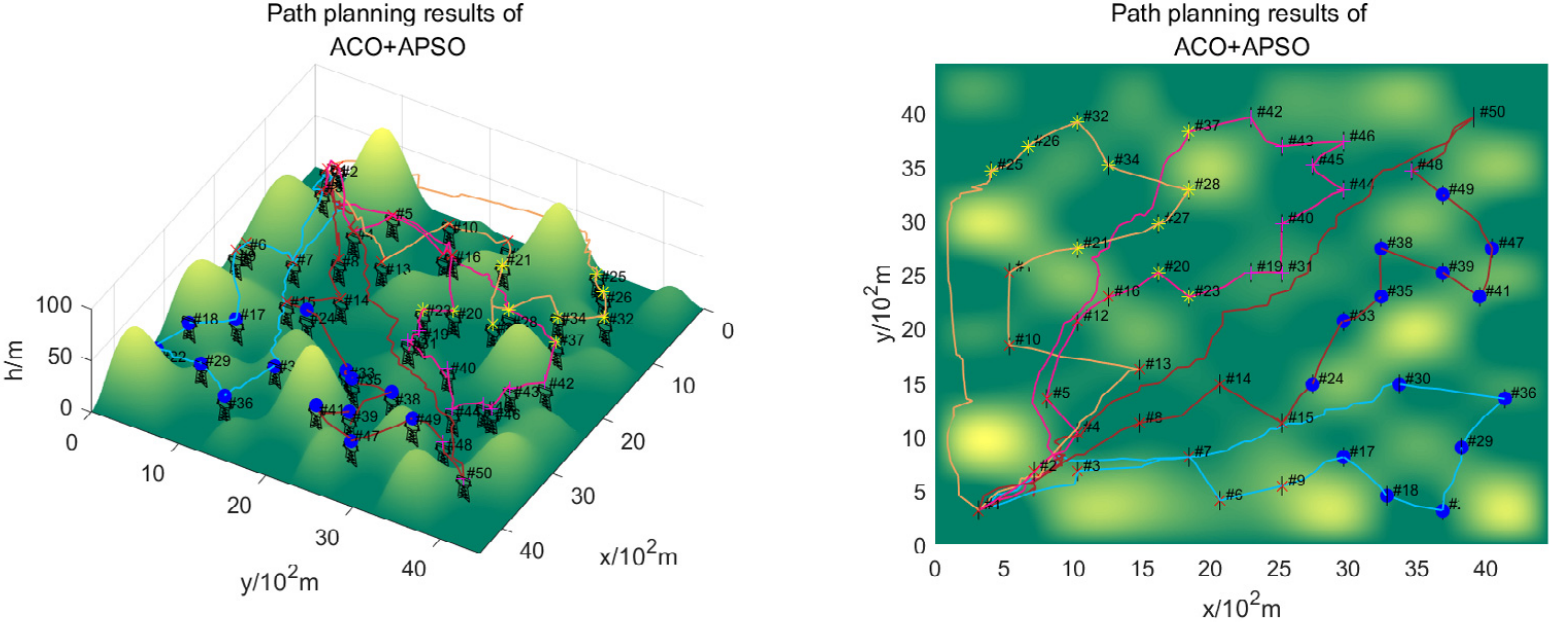
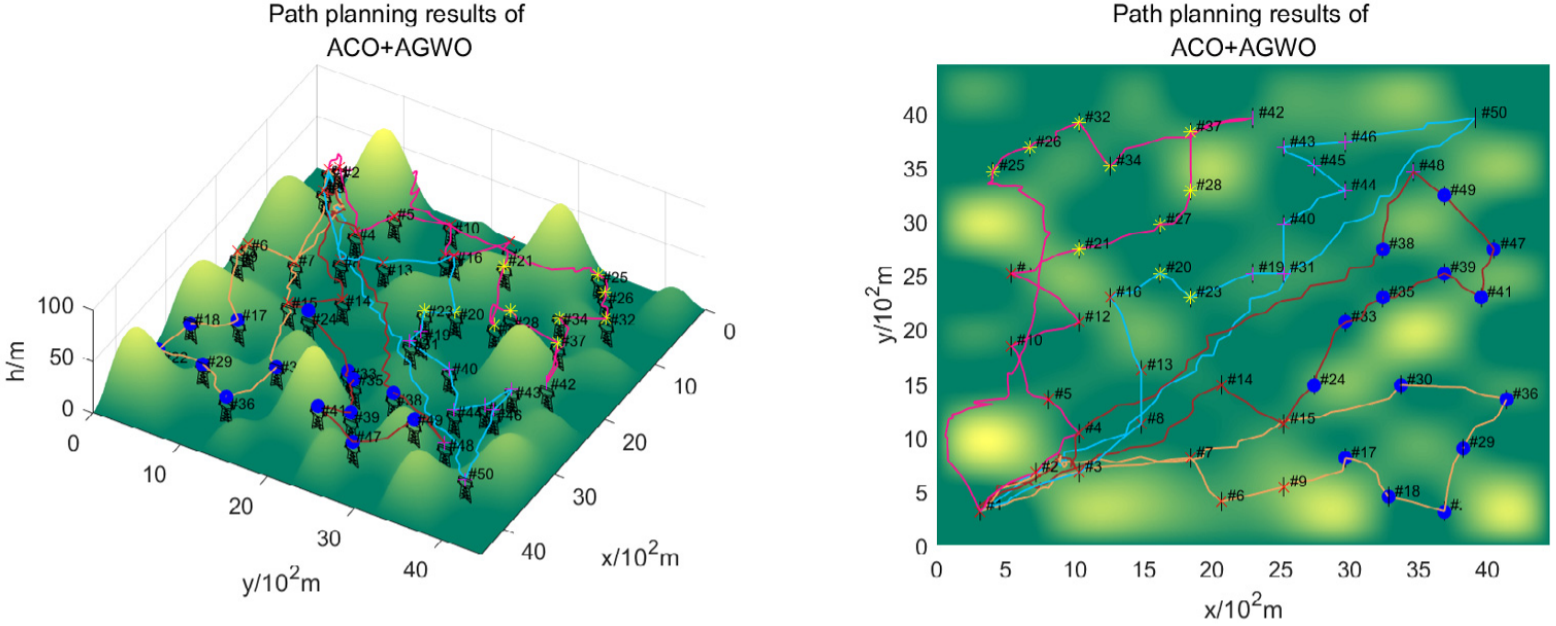
之前做的案例:
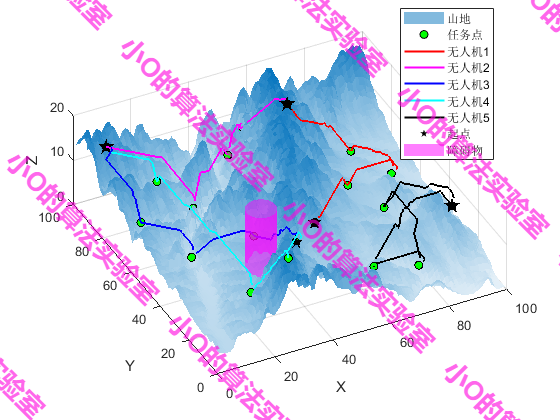
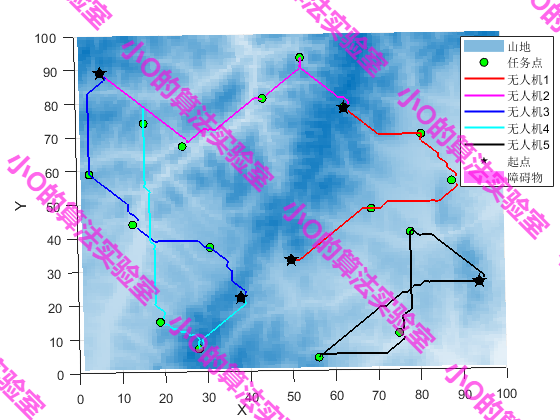
PS:应用创新强,适合定制
6.参考文献
[1] Li K, Yan X, Han Y. Multi-mechanism swarm optimization for multi-UAV task assignment and path planning in transmission line inspection under multi-wind field[J]. Applied Soft Computing, 2024, 150: 111033.