FreeRTOS的学习记录(基础知识)
FreeRTOS 简介
FreeRTOS 是一个开源的实时操作系统(RTOS),专为嵌入式系统设计。它提供了任务管理、时间管理、信号量、消息队列、内存管理等功能,适用于资源受限的微控制器。
FreeRTOS 是一个开源的实时操作系统内核,广泛应用于嵌入式系统中。其任务调度机制是其核心功能之一,确保多个任务能够高效、有序地运行。
任务调度机制
FreeRTOS 使用抢占式调度算法,允许高优先级的任务抢占低优先级任务的执行。每个任务都有一个优先级,优先级越高,任务越容易被调度执行。FreeRTOS 支持固定优先级调度,任务在创建时指定优先级,运行时不会动态改变。
任务状态
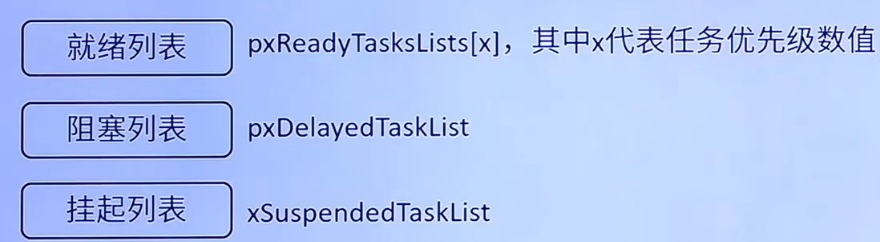
任务在 FreeRTOS 中有以下几种状态:
- 运行态(Running):任务正在执行。
- 就绪态(Ready):任务已准备好运行,但当前未被调度。
- 阻塞态(Blocked):任务等待某个事件(如信号量、队列等)或延时。
- 挂起态(Suspended):任务被显式挂起,不会被调度。

调度器
FreeRTOS 的调度器负责决定哪个任务应该运行。调度器有两种模式:
- 抢占式调度:高优先级任务一旦就绪,立即抢占低优先级任务的执行。
- 时间片调度:FreeRTOS 支持时间片轮转调度,允许相同优先级的任务轮流执行。每个任务分配一个时间片,时间片用完后,调度器切换到下一个就绪任务。(时间片可设置,在FreeRTOS中,一个时间片时间等于Systick中断周期)
- 协程式调度:任务主动让出 CPU 控制权,其他任务才能运行。
任务切换
任务切换发生在以下情况:
- 高优先级任务就绪。
- 当前任务主动阻塞或挂起。
- 时间片轮转调度中,当前任务的时间片用完。
任务管理
FreeRTOS 的核心是任务(Task),每个任务都是一个独立的执行单元。任务可以创建、删除、挂起和恢复。任务的优先级决定了它们的执行顺序。
void vTaskFunction(void *pvParameters) {for (;;) {// 任务代码}
}xTaskCreate(vTaskFunction, "TaskName", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
时间管理
FreeRTOS 提供了 vTaskDelay 和 vTaskDelayUntil 函数,用于任务的延时操作。vTaskDelay 使任务进入阻塞状态,直到指定的时间过去。
vTaskDelay(1000 / portTICK_PERIOD_MS); // 延时1秒
信号量
信号量用于任务间的同步和互斥。FreeRTOS 提供了二进制信号量和计数信号量。信号量可以用于控制资源的访问。
SemaphoreHandle_t xSemaphore = xSemaphoreCreateBinary();xSemaphoreGive(xSemaphore); // 释放信号量
xSemaphoreTake(xSemaphore, portMAX_DELAY); // 获取信号量
消息队列
消息队列用于任务间的数据传递。任务可以通过消息队列发送和接收数据。
QueueHandle_t xQueue = xQueueCreate(10, sizeof(int));int data = 10;
xQueueSend(xQueue, &data, portMAX_DELAY); // 发送数据
xQueueReceive(xQueue, &data, portMAX_DELAY); // 接收数据
内存管理
FreeRTOS 提供了动态内存分配功能,用户可以选择使用 FreeRTOS 自带的内存管理方案,或者自定义内存管理方案。
void *pvPortMalloc(size_t xWantedSize);
void vPortFree(void *pv);
中断管理
FreeRTOS 支持中断服务例程(ISR),并且提供了与任务同步的机制。中断服务例程可以使用 xQueueSendFromISR 和 xSemaphoreGiveFromISR 等函数与任务通信。
void vISRFunction(void) {BaseType_t xHigherPriorityTaskWoken = pdFALSE;xQueueSendFromISR(xQueue, &data, &xHigherPriorityTaskWoken);portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
配置与移植
FreeRTOS 的配置通过 FreeRTOSConfig.h 文件进行。用户可以根据需求配置任务优先级、堆栈大小、时钟频率等参数。移植 FreeRTOS 到不同的硬件平台需要实现特定的硬件抽象层(HAL)。
#define configUSE_PREEMPTION 1
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configCPU_CLOCK_HZ (SystemCoreClock)
#define configTICK_RATE_HZ ((TickType_t)1000)
调试与优化
FreeRTOS 提供了丰富的调试工具,如任务状态查看、堆栈使用情况分析等。通过合理配置和优化,可以提高系统的实时性和稳定性。
void vTaskList(char *pcWriteBuffer);
void vTaskGetRunTimeStats(char *pcWriteBuffer);
参考资料
- FreeRTOS 官方文档
- FreeRTOS GitHub 仓库
通过以上内容,可以初步了解 FreeRTOS 的基础知识,并开始在实际项目中应用。