一种运动平台扫描雷达超分辨成像视场选择方法——论文阅读
一种运动平台扫描雷达超分辨成像视场选择方法
- 1. 专利的研究目标与意义
- 1.1 研究目标
- 1.2 实际意义
- 2. 专利的创新方法与技术细节
- 2.1 核心思路与流程
- 2.1.1 方法流程图
- 2.2 关键公式与模型
- 2.2.1 回波卷积模型
- 2.2.2 最大后验概率(MAP)估计
- 2.2.3 统计约束模型
- 2.2.4 迭代优化公式
- 2.3 与传统方法的对比优势
- 3. 实验设计与结果验证
- 3.1 仿真参数设置
- 3.2 实验结果对比
- 4. 未来研究方向与挑战
- 4.1 技术挑战
- 4.2 潜在创新点
- 5. 批判性分析与不足
- 5.1 局限性
- 5.2 验证需求
- 6. 创新启发与学习建议
- 6.1 可借鉴的创新点
- 6.2 背景知识补充
1. 专利的研究目标与意义
1.1 研究目标
专利旨在解决实波束扫描雷达方位向分辨率低的问题。传统方法(如维纳滤波、单脉冲技术)受限于系统参数和噪声干扰,难以在低信噪比(SNR)环境下实现高分辨成像。本专利提出一种基于贝叶斯最大后验概率(Maximum a Posteriori, MAP)估计的角超分辨方法,通过引入广义高斯分布(Generalized Gaussian Distribution, GGD)和泊松分布(Poisson Distribution)约束目标与噪声的统计特性,提升反卷积过程的鲁棒性。
1.2 实际意义
- 应用场景:军用目标识别、飞机自主着陆、海洋搜索等需要高精度前视成像的领域。
- 技术价值:突破雷达系统参数对分辨率的限制,实现方位向超分辨,提升复杂环境下的成像能力。
2. 专利的创新方法与技术细节
2.1 核心思路与流程
专利通过贝叶斯反卷积框架将雷达回波建模为统计优化问题,具体流程如下:
- 回波建模与预处理:构建卷积形式的回波信号模型。
- 统计约束设计:利用广义高斯分布描述目标稀疏性,泊松分布描述噪声特性。
- 最大后验概率估计:通过迭代优化求解目标散射系数。
2.1.1 方法流程图
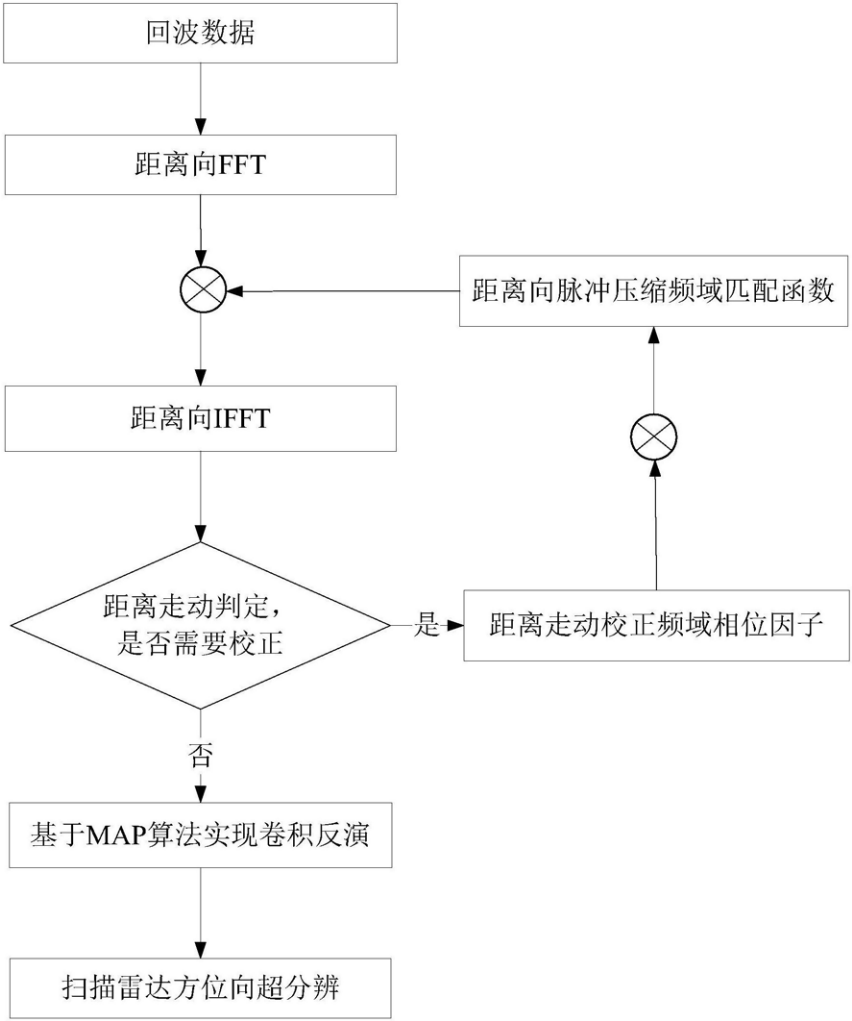
2.2 关键公式与模型
2.2.1 回波卷积模型
雷达回波信号经预处理后表示为:
s = W σ + n s = W\sigma + n s=Wσ+n
其中, s s s 为方位向回波向量, W W W 为由天线方向图和运动相位构成的卷积矩阵, σ \sigma σ 为目标散射系数向量, n n n 为噪声向量。
2.2.2 最大后验概率(MAP)估计
基于贝叶斯定理,目标散射系数的后验概率为:
p ( σ ∣ s ) = p ( s ∣ σ ) p ( σ ) p ( s ) p(\sigma \mid s) = \frac{p(s \mid \sigma) p(\sigma)}{p(s)} p(σ∣s)=p(s)p(s∣σ)p(σ)
通过最大化后验概率,得到优化问题:
σ ^ = arg max σ [ p ( s ∣ σ ) p ( σ ) ] \hat{\sigma} = \arg\max_{\sigma} \left[ p(s \mid \sigma) p(\sigma) \right]