课题推荐——通信信号处理中的非线性系统状态估计(如信号跟踪、相位恢复等场景),使用无迹卡尔曼滤波(UKF)的非线性滤波算法,MATLAB实现
给出一个基于无迹卡尔曼滤波(UKF)的非线性滤波算法及其MATLAB实现,适用于通信信号处理中的非线性系统状态估计(如信号跟踪、相位恢复等场景)。该算法结合了非线性动态模型和观测模型,并通过UT变换避免雅可比矩阵计算,具有较高的估计精度。
文章目录
- 算法原理
- 算法说明
- 运行结果
- MATLAB例程
算法原理
UKF通过无迹变换( U n s c e n t e d T r a n s f o r m , U T Unscented Transform, UT UnscentedTransform,UT)对非线性系统进行高斯近似,生成一组 S i g m a Sigma Sigma点来传播状态均值和协方差,解决了扩展卡尔曼滤波( E K F EKF EKF)中线性化误差的问题。其核心步骤包括:
- Sigma点生成:根据状态均值和协方差生成对称分布的Sigma点。
- 预测步骤:通过非线性状态方程传播Sigma点,计算预测均值和协方差。
- 更新步骤:通过观测方程计算预测观测值,结合实际观测值更新状态估计。
算法说明
- 状态模型:假设相位θ随时间线性变化(频率Δθ为常数),状态方程为非线性动态。
- 观测模型:观测值为复信号的相位角,加入高斯噪声。
- UT变换:通过对称分布的 S i g m a Sigma Sigma点捕获非线性传播后的统计特性。
- 适用场景:通信信号中的相位同步、频率跟踪、非线性信道估计等。
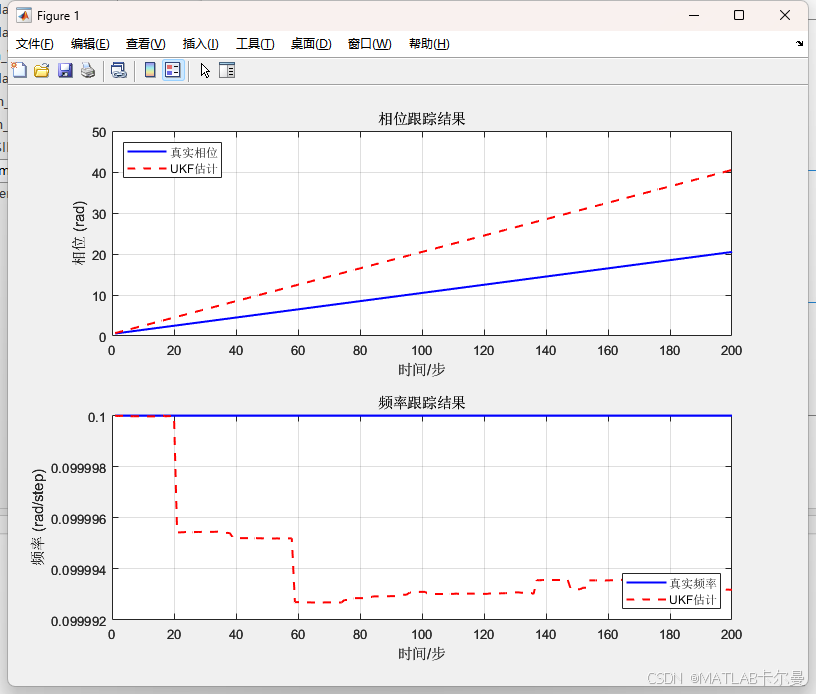
运行结果
MATLAB例程
%% UKF参数设置
alpha = 1e-3; % UT变换参数
beta = 2; % 高斯分布参数
kappa = 0; % 调节Sigma点分布
n = 2; % 状态维度(相位θ和频率Δθ)
lambda = alpha^2 * (n + kappa) - n;%% 初始化
x_true = [0; 0.1]; % 真实状态:[相位, 频率]
x_est = [0; 0]; % 初始估计状态
P = diag([0.5, 0.1]); % 初始协方差矩阵
Q = diag([0.01, 0.001]); % 过程噪声协方差
R = 0.1; % 观测噪声方差%% 生成测试信号(QPSK调制信号)
T = 100; % 时间步长
t = 1:T;
phase_true = cumsum(x_true(2)*ones(1,T)) + x_true(1); % 真实相位轨迹
signal = exp(1j*phase_true) + sqrt(R)*randn(1,T); % 含噪声观测%% UKF主循环
x_est_ukf = zeros(n, T);
for k = 1:T% 1. Sigma点生成sigma_points = ukf_sigma(x_est, P, lambda, n);% 2. 预测步骤(状态方程:相位和频率动态)sigma_pred = zeros(n, 2*n+1);for i = 1:2*n+1sigma_pred(:,i) = [sigma_points(1,i) + sigma_points(2,i); sigma_points(2,i)] + sqrt(Q)*randn(n,1);endx_pred = sigma_pred * [lambda/(n+lambda); 0.5/(n+lambda)*ones(2*n,1)];P_pred = Q;for i = 1:2*n+1P_pred = P_pred + (sigma_pred(:,i) - x_pred) * (sigma_pred(:,i) - x_pred)' * (i==1 ? lambda/(n+lambda) : 0.5/(n+lambda));end% 3. 观测预测(非线性观测:复信号相位提取)z_pred = angle(sigma_pred(1,:) + 1j*randn); % 模拟相位观测z_mean = z_pred * [lambda/(n+lambda); 0.5/(n+lambda)*ones(2*n,1)];% 4. 更新步骤Pzz = R;Pxz = zeros(n,1);for i = 1:2*n+1Pzz = Pzz + (z_pred(i) - z_mean)^2 * (i==1 ? lambda/(n+lambda) : 0.5/(n+lambda));Pxz = Pxz + (sigma_pred(:,i) - x_pred) * (z_pred(i) - z_mean) * (i==1 ? lambda/(n+lambda) : 0.5/(n+lambda));endK = Pxz / Pzz;x_est = x_pred + K * (angle(signal(k)) - z_mean);P = P_pred - K * Pzz * K';x_est_ukf(:,k) = x_est;
end%% 结果可视化
figure;
subplot(2,1,1);
plot(t, phase_true, 'b', t, x_est_ukf(1,:), 'r--');
legend('真实相位', 'UKF估计相位');
xlabel('时间步'); ylabel('相位(rad)');subplot(2,1,2);
plot(t, x_true(2)*ones(1,T), 'b', t, x_est_ukf(2,:), 'r--');
legend('真实频率', 'UKF估计频率');
xlabel('时间步'); ylabel('频率(rad/step)');更多函数子函数、误差计算与绘图等代码:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者