ros2的基本使用以及框架介绍(ros2入门基础)
1,创建一个文件夹,然后创建一个空的工程
创建文件夹
创建工程
2,创建src文件夹
3,在src下面创建创建功能包
cd ros_ws/src //进入到工作空间
ros2 pkg create learning_pkg_py //创建名称为learning_pkg_py的功能包;这里只是单纯的创建了一个功能包
可以创建多个功能包(不同的功能模块可以创建不同的功能包,到时候启动的时候可以找到功能包,然后启动)
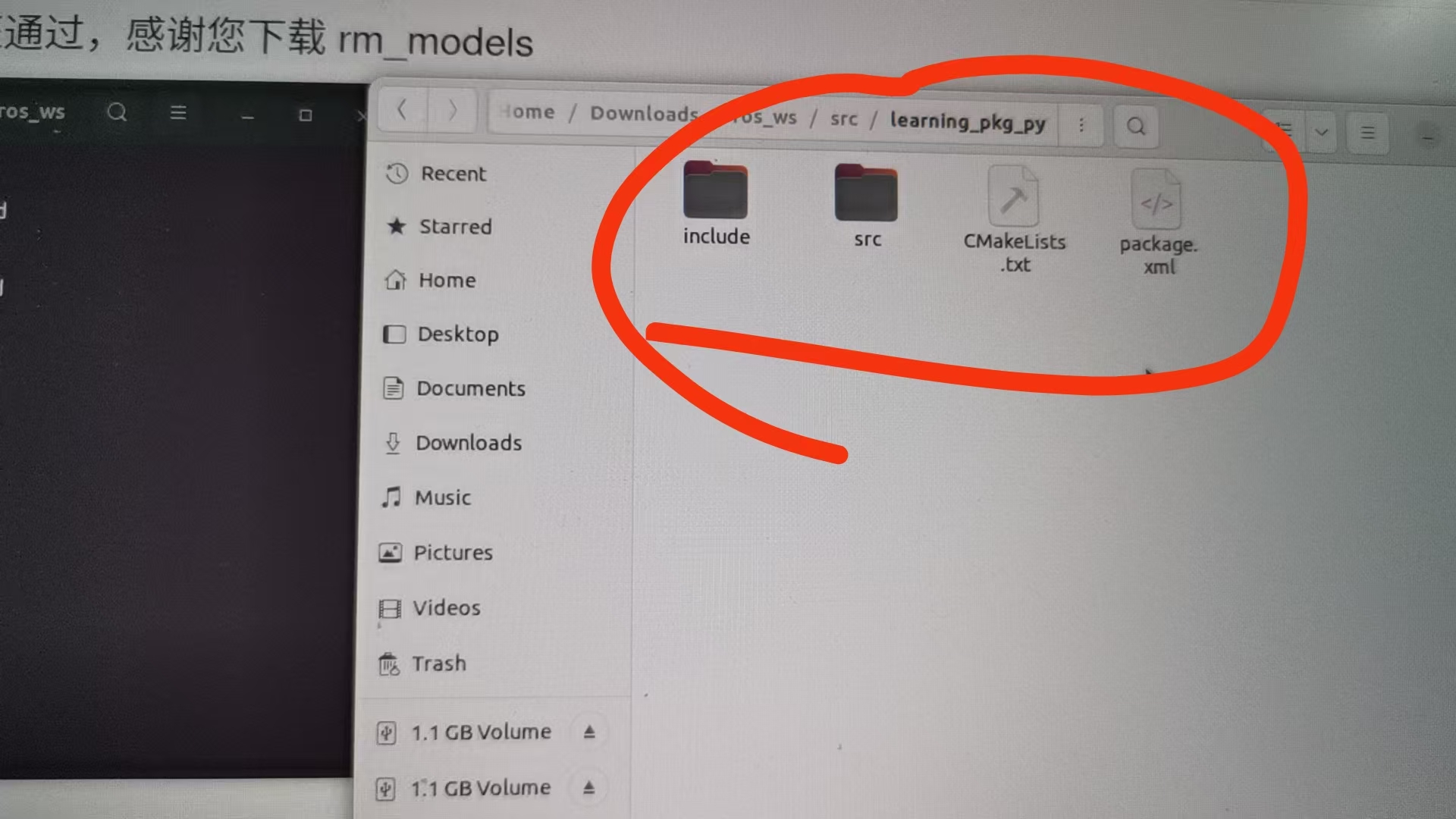
创建好的功能包包含自己的程序src目录,以及Cmakelist等
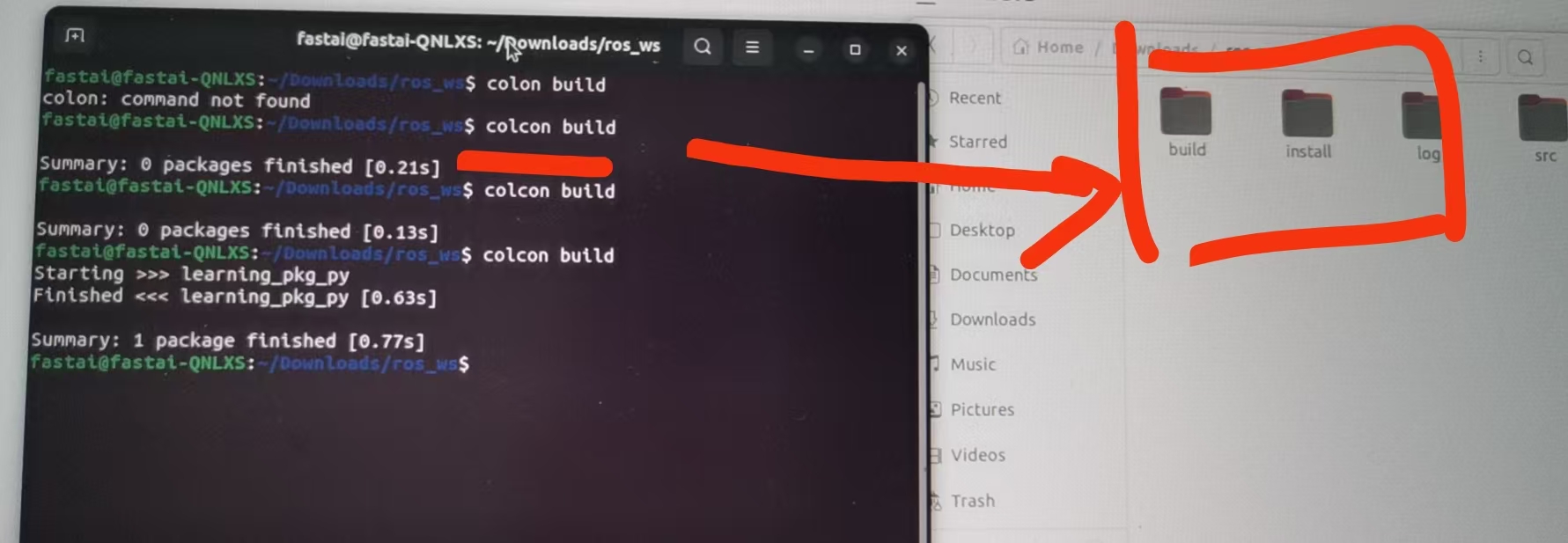
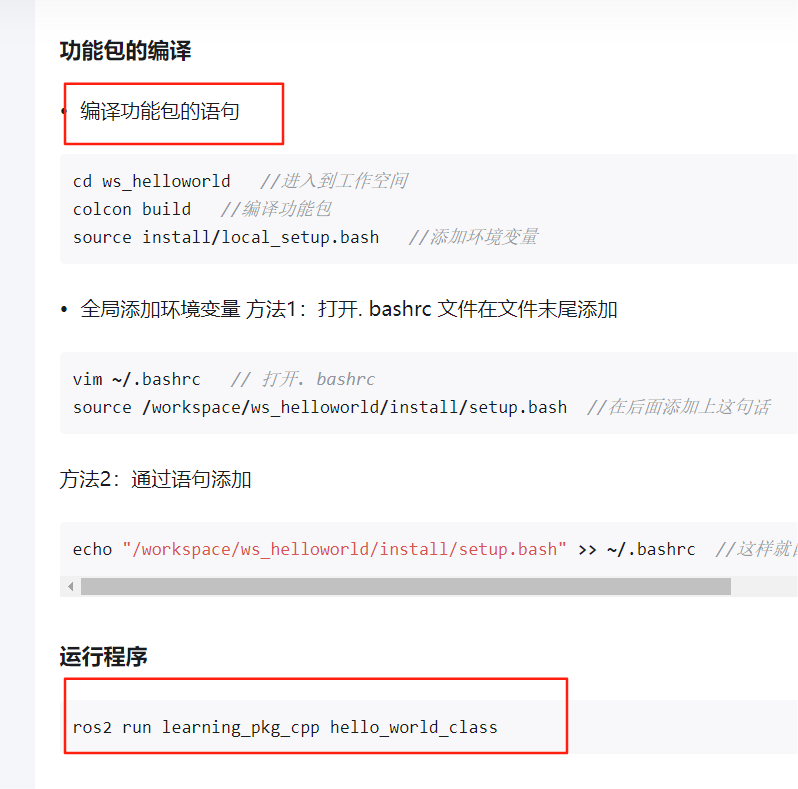
4,编译和运行功能包,使用colcon build指令编译一下项目,就可以看到功能包被编译(记得source一下)
source ./install/setup.bash(一般是在主目录的工作空间,而不是子功能包里)
参考链接:
https://zhuanlan.zhihu.com/p/19955333902
https://zhuanlan.zhihu.com/p/427770915