Part 1️⃣:相机几何与单视图几何-第六章:相机模型
Part 1️⃣介绍
这一部分主要探讨单视角相机的几何学,包含三个章节。
第六章描述了3D场景空间到2D图像平面的投影过程。相机映射由一个矩阵表示,对于点的映射而言,这是一个3×4矩阵P,它将3D空间中世界点的齐次坐标映射到图像平面上成像点的齐次坐标。该矩阵通常具有11个自由度,相机属性(如相机中心和焦距)可从中提取。特别地,内部相机参数(如焦距和纵横比)被封装在一个3×3矩阵K中,该矩阵可通过简单分解从P获得。相机矩阵有两类特别重要的类型:有限相机和中心位于无穷远处的相机(如表示平行投影的仿射相机)。
第七章阐述了在给定一组对应世界点和图像点坐标的情况下,如何估计相机矩阵P。本章还讨论了如何有效将相机约束融入估计过程,以及校正径向透镜畸变的方法。
第八章涵盖三个主题:首先讨论相机对除有限点外的其他几何对象的作用,包括直线、圆锥曲线、二次曲面和无穷远点。无穷远点/直线的图像是消失点/线。第二个主题是相机标定,即在不计算整个矩阵P的情况下,计算相机矩阵的内部参数K,重点阐述内部参数与绝对圆锥图像的关系,以及如何通过消失点和消失线标定相机。最后介绍标定圆锥——这是一种用于可视化相机标定的简单几何工具。
6.1有限远相机
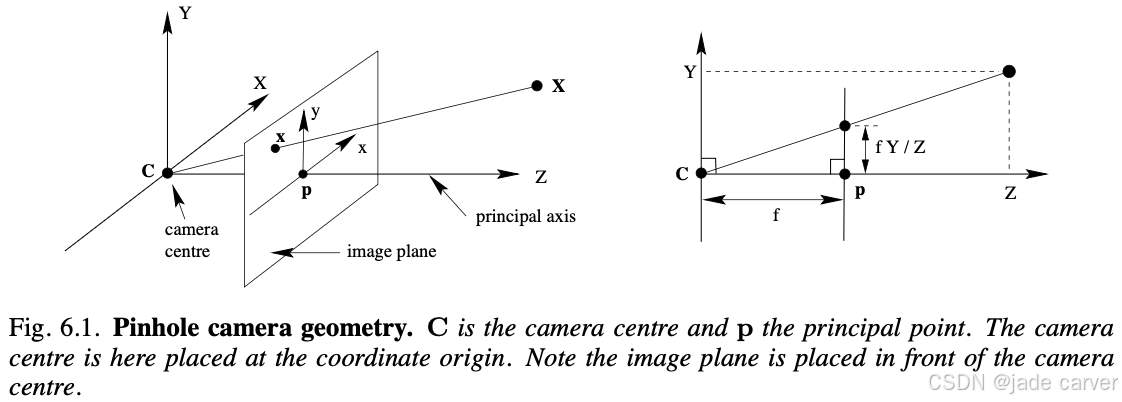
6.1.1 基础针孔相机模型
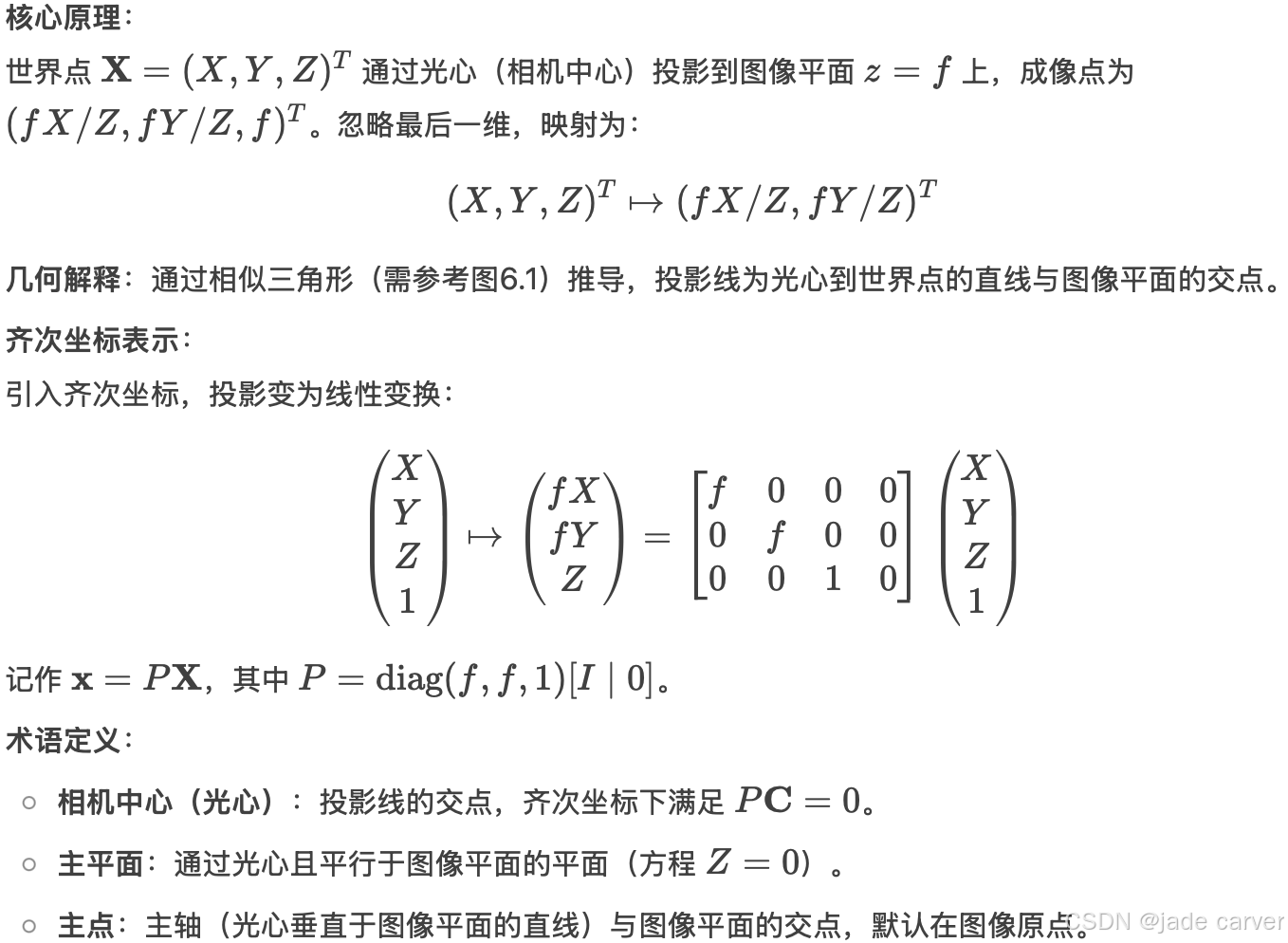
根据上述,实际上这个投影过程就是一个从3D欧式空间到2D欧式空间的一个映射。所以,这里是基于相机成像的相似三角形原理,刚好巧妙的把深度Z作为了齐次坐标的最后一维w。最后,这个z=f为相机的焦距。
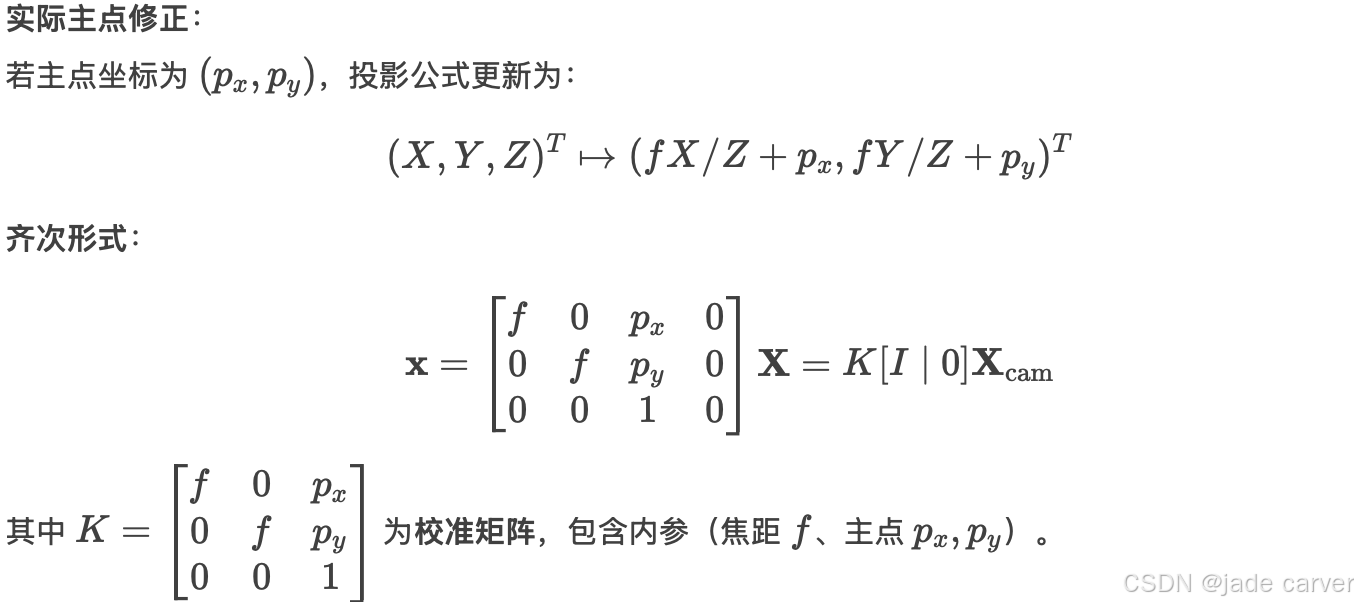
6.1.2 主点偏移与校准矩阵 K
上面的模型是规则形态,即主点p位于图像原点(0,0),现在考虑一般情况,即主点位于其他位置:
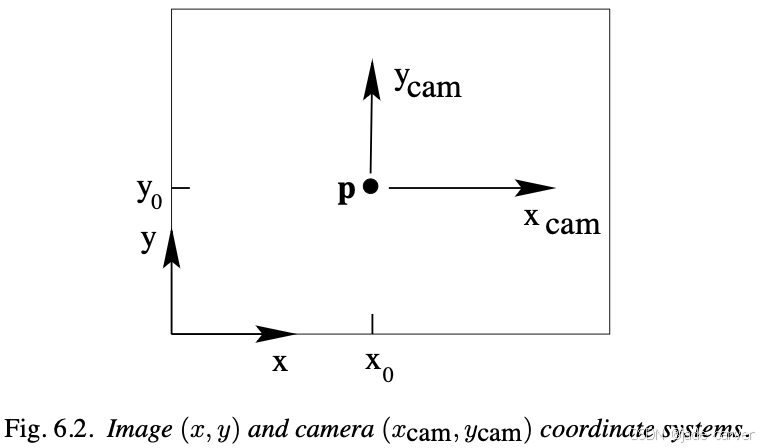
相机坐标系:
一般情况介绍完了,回头再考虑相机位置如果还是在原点呢,此时我们将该坐标系称为相机坐标系:
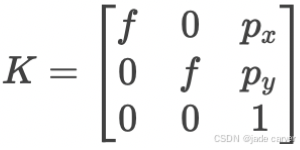
矩阵K被称为相机标定矩阵(也叫校准矩阵)。在公式![]() 中,我们将(X, Y, Z,1)T表示为Xcam是为了强调:我们假设相机位于欧几里得坐标系的原点,且相机的主轴与Z轴重合,而Xcam点正是在该坐标系下表示的。这样的坐标系可称为相机坐标系框架。
中,我们将(X, Y, Z,1)T表示为Xcam是为了强调:我们假设相机位于欧几里得坐标系的原点,且相机的主轴与Z轴重合,而Xcam点正是在该坐标系下表示的。这样的坐标系可称为相机坐标系框架。
6.1.3世界坐标系与外参
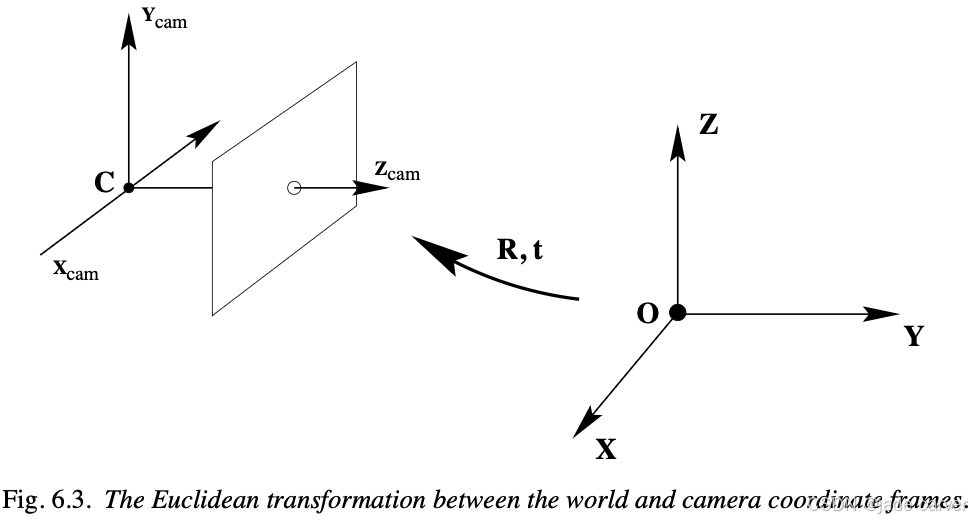
通常情况下,空间中的点会以另一个欧几里得坐标系(称为世界坐标系)表示。这两个坐标系之间通过旋转和平移相关联(见图6.3)。
若 ![]() 是一个非齐次3维向量,表示某点在世界坐标系中的坐标,而
是一个非齐次3维向量,表示某点在世界坐标系中的坐标,而![]() 表示该点在相机坐标系中的坐标,则它们之间的关系可表示为:
表示该点在相机坐标系中的坐标,则它们之间的关系可表示为:
![]()
其中,![]() 表示相机中心在世界坐标系中的坐标,R 是一个 3×3 的旋转矩阵,表示相机坐标系的朝向。该方程可写成齐次坐标形式:
表示相机中心在世界坐标系中的坐标,R 是一个 3×3 的旋转矩阵,表示相机坐标系的朝向。该方程可写成齐次坐标形式:
将其与![]() (6.5) 式结合,可得:
(6.5) 式结合,可得:
![]()
其中,X 现在位于世界坐标系中。这就是针孔相机的一般映射关系。可以看出,一个通用的针孔相机![]() 具有 9 个自由度:
具有 9 个自由度:
 包含 3 个参数(
包含 3 个参数( )
)- R 包含 3 个参数
-
 包含 3 个参数
包含 3 个参数
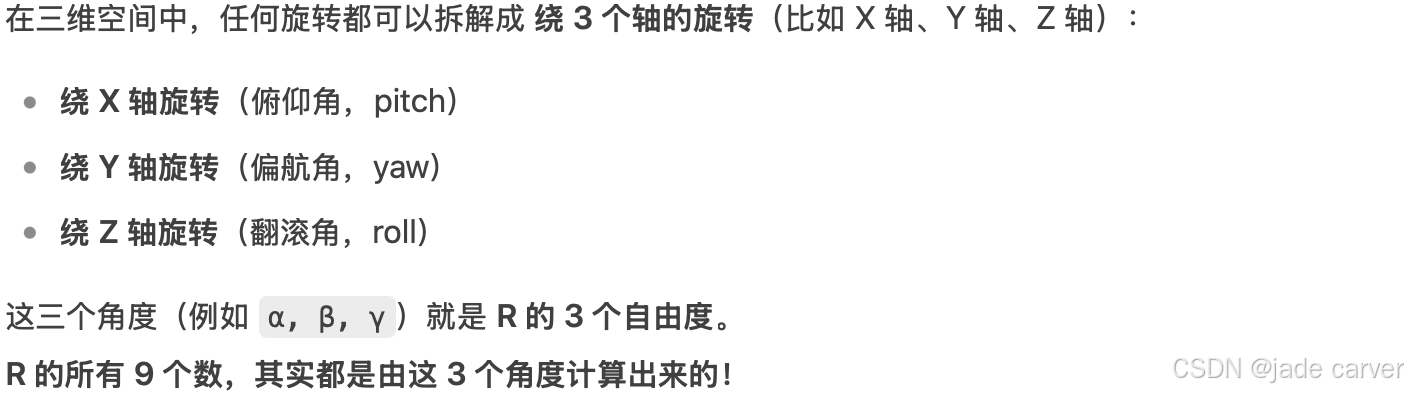
为什么R只有3个自由度:
K 中的参数称为相机内参(internal camera parameters)或内部定向(internal orientation),而 R 和 C 的参数用于描述相机朝向和位置与世界坐标系的关系,称为外参(external parameters)或外部定向(exterior orientation)。
有时,不显式表示相机中心会更方便,而是将世界坐标系到图像的变换表示为