基于FPGA的8PSK+卷积编码Viterbi译码通信系统,包含帧同步,信道,误码统计,可设置SNR
目录
1.引言
2.算法仿真效果
3.算法涉及理论知识概要
3.1 8PSK调制原理
3.2 帧同步
3.3 卷积编码,维特比译码
4.Verilog程序接口
5.参考文献
6.完整算法代码文件获得
1.引言
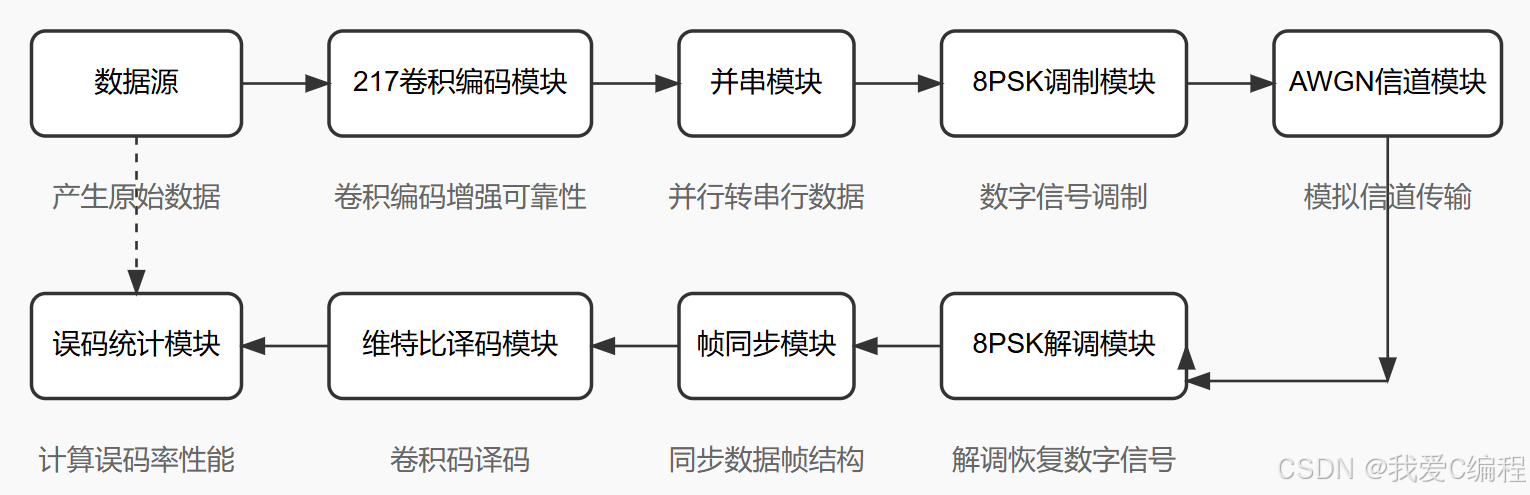
基于FPGA的8PSK+卷积编码Viterbi译码通信系统开发,包含帧同步,高斯信道,误码统计,可设置SNR。系统包括8PSK调制模块,8PSK解调模块,217卷积编码模块,维特比译码模块,AWGN信道模块,误码统计模块,帧同步模块,数据源模块等。
2.算法仿真效果
本系统是在
基于FPGA的8PSK+帧同步系统verilog开发,包含testbench,高斯信道,误码统计,可设置SNR_通过ad9914实现8psk调制信号的fpga代码-CSDN博客
基础上,增加了217卷积编码,维特比译码(不使用编译码IP核),从而提升系统性能。
vivado2022.2测试
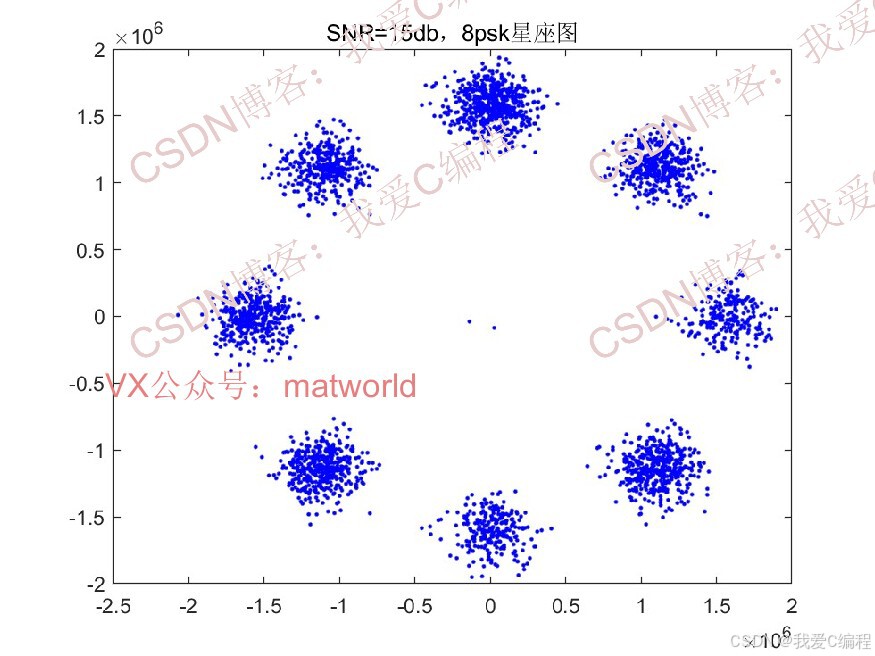
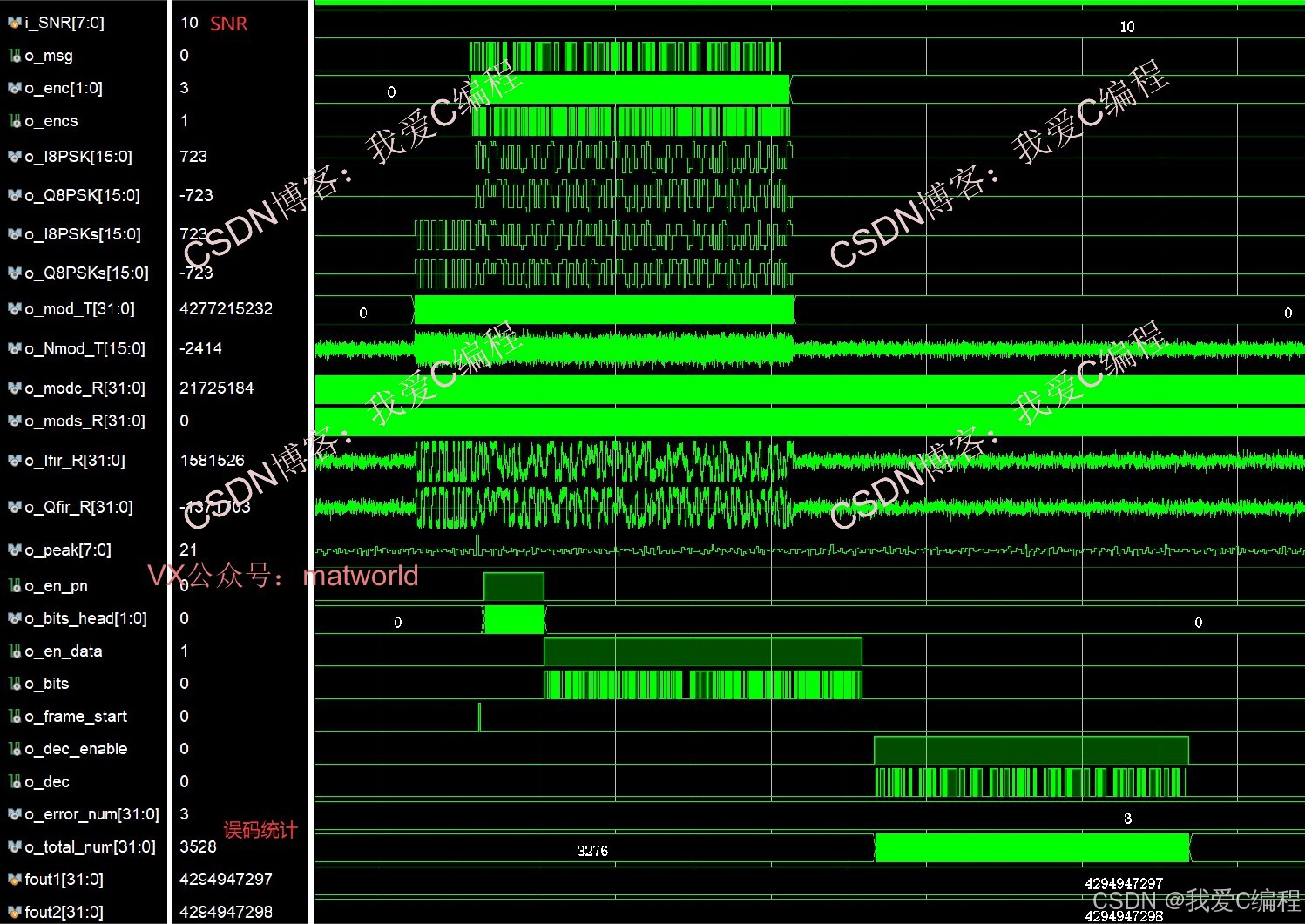
设置SNR=15db

将数据导出到matlab中显示星座图:
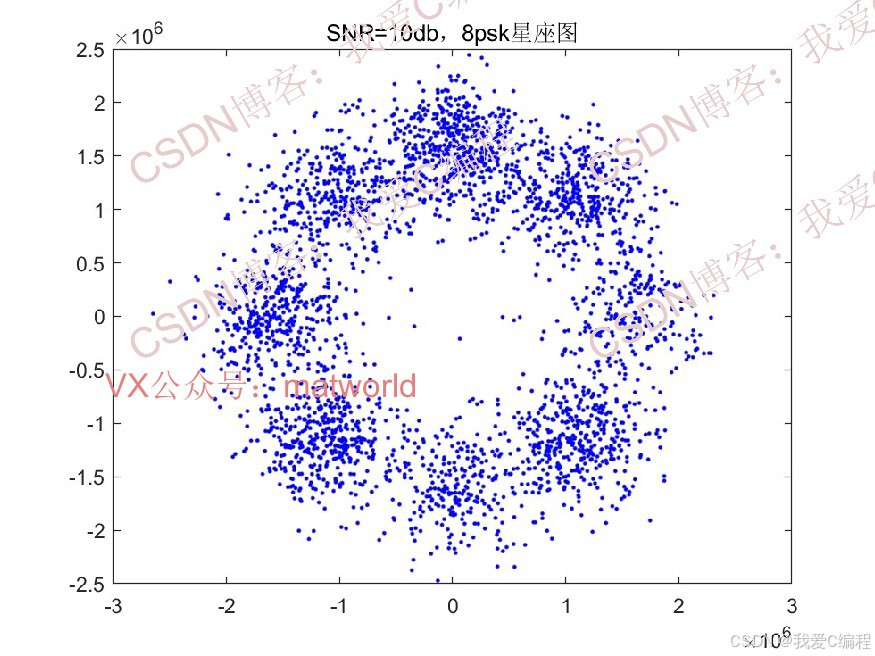
设置SNR=10db
将数据导出到matlab中显示星座图:
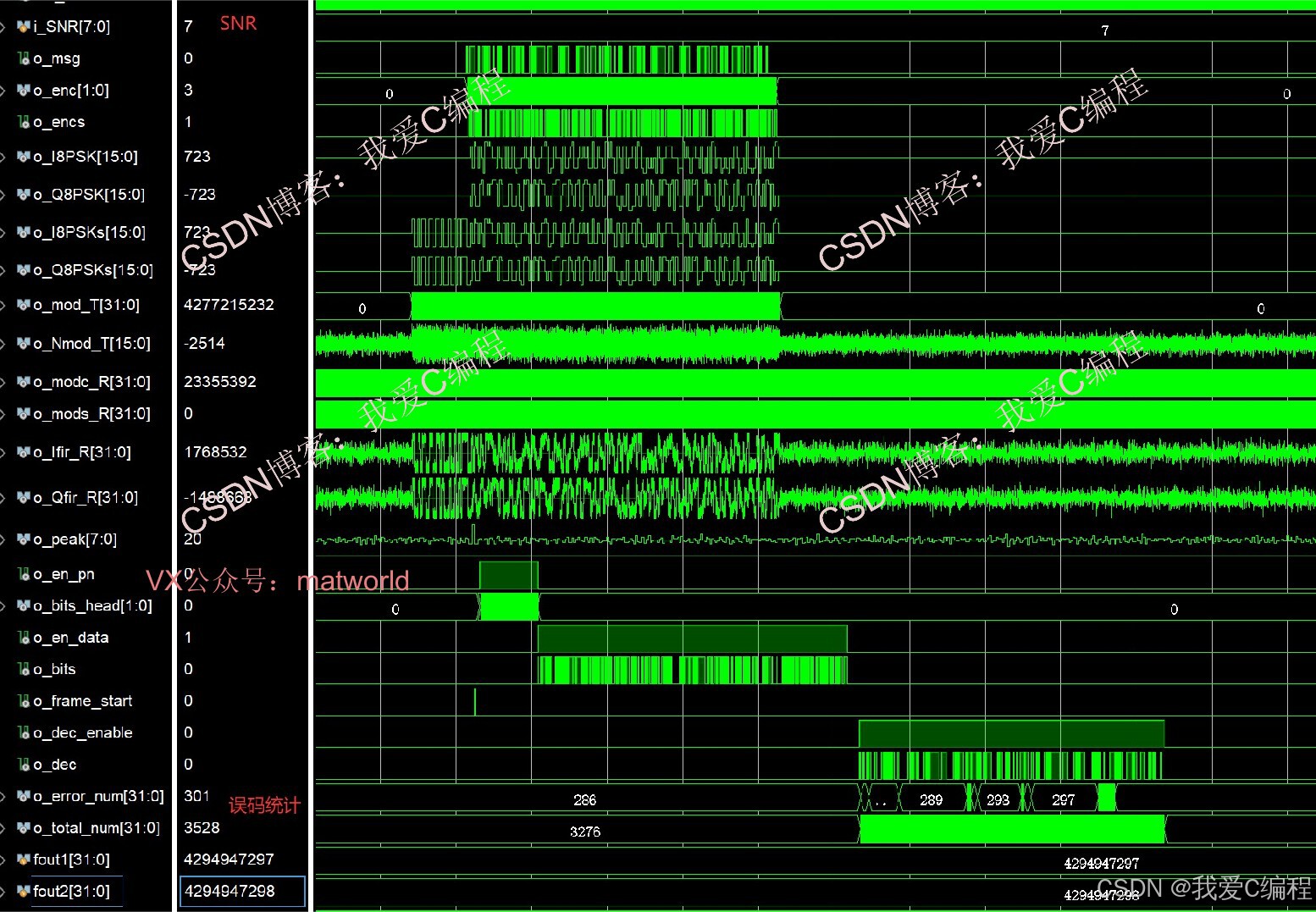
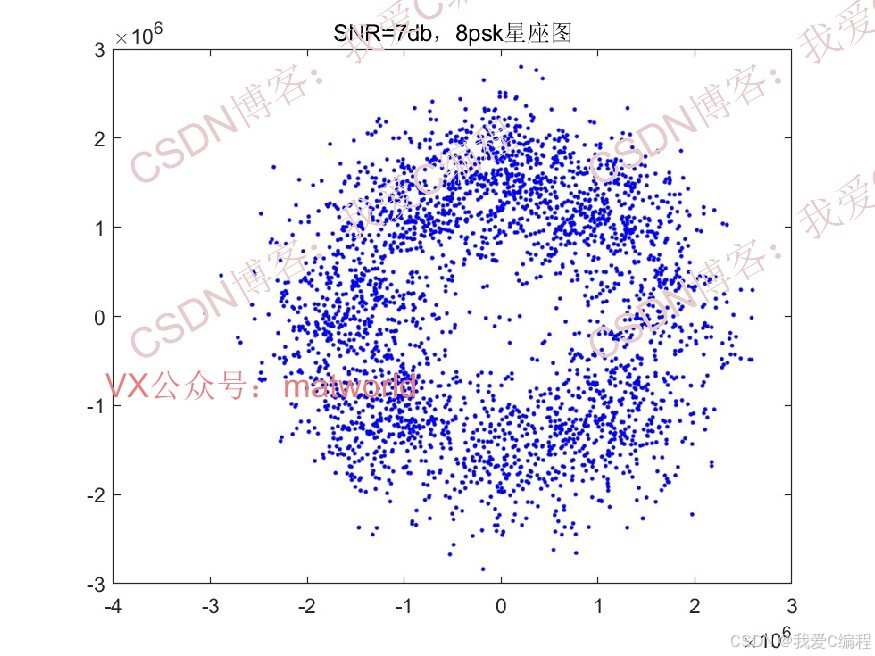
设置SNR=7db
将数据导出到matlab中显示星座图:
3.算法涉及理论知识概要
整体系统结构如下所示:
3.1 8PSK调制原理
8PSK调制是一种相位调制方式,其基本原理是通过改变载波的相位来传递信息。在8PSK中,一个符号周期内的相位变化有8种可能的状态,分别对应3个比特的信息。因此,8PSK调制可以看作是一种将3个比特映射到一个符号的映射方式。具体地,假设输入的比特序列为b2b1b0,则对应的8PSK符号可以表示为:
S(t)=Acos(2πfct+θk) (1)
其中,A是载波的振幅,fc是载波的频率,θk是第k个符号的相位,k=0,1,...,7。θk的取值由输入的比特序列b2b1b0决定,具体的映射关系如表1所示。
表1:8PSK映射关系

其星座图如下所示:

3.2 帧同步
在数字通信中,信息通常是以帧为单位进行组织和传输的。帧同步的目的是确定每一帧的起始位置,以便接收端能够正确地解调出每帧中的数据。
设发送的帧结构为:帧同步码 + 信息码元序列 。帧同步码是具有特定规律的码序列,用于接收端识别帧的起始。
帧同步的过程就是在接收序列中寻找与帧同步码匹配的位置,一旦找到匹配位置,就确定了帧的起始位置,后续的码元就可以按照帧结构进行正确的划分和处理。
3.3 卷积编码,维特比译码
卷积编码是一种前向纠错编码方式,特别适用于无线通信和其他信道条件恶劣的应用场景。它主要通过卷积算子将信息序列映射成冗余度更高的码字序列。典型的卷积编码器由两个移位寄存器和一个加法器构成,遵循一定的生成多项式进行编码。
设信息序列是 u(n),卷积编码器的两个生成多项式为 G1(D) 和 G2(D),则编码输出v(n) 可以表示为:
v(n)=u(n)G1(D)+u(n−1)G2(D)+…
此处D 是延迟算子,实际表达形式取决于具体选择的生成多项式阶数及系数。
维特比译码是用于最大似然序列估计的一种动态规划算法,广泛应用于卷积编码以及其他序列编码的译码过程中。在卷积编码中,维特比译码器通过构造一棵称为“状态转移图”或“trellis”的树状结构来寻找最有可能的原始信息序列路径。
4.Verilog程序接口
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer:
//
// Create Date: 2023/05/03 06:21:37
// Design Name:
// Module Name: TEST
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
X
module TEST();reg i_clk;
reg i_rst;
reg signed[7:0]i_SNR;
wire signed[1:0]o_en;
wire o_msg;
wire dat_clk;
wire dat_2clk;
signal signal_u(
.i_clk (i_clk),
.i_rst (i_rst),
.o_en(o_en),
.o_bits(o_msg),
.dat_clk(dat_clk),
.dat_2clk(dat_2clk)
);reg signed[7:0]i_SNR;wire [1:0]o_enc;
wire o_encs;
wire[2:0]o_ISET;
wire signed[15:0]o_I8PSK;
wire signed[15:0]o_Q8PSK;
wire signed[15:0]o_I8PSKs;
wire signed[15:0]o_Q8PSKs;
wire signed[31:0]o_mod_T;
wire signed[15:0]o_Nmod_T;
wire signed[31:0]o_modc_R;
wire signed[31:0]o_mods_R;
wire signed[31:0]o_Ifir_R;
wire signed[31:0]o_Qfir_R;
wire [2:0]o_wbits;
wire o_bits;
wire [1:0]o_bits_head;
wire [7:0]o_peak;
wire o_en_data;
wire o_en_pn;
wire o_frame_start;
wire o_dec_enable;
wire o_dec;
wire signed[31:0]o_error_num;
wire signed[31:0]o_total_num; TOPS_8PSK TOPS_8PSK_u(
.i_clk (i_clk),
.i_clkdx (dat_clk),
.i_clkd2x (dat_2clk),
.i_rst (i_rst),
.i_SNR (i_SNR),
.i_en (o_en),
.i_dat (o_msg),
.o_enc (o_enc),
.o_encs (o_encs),
.o_ISET (o_ISET),
.o_I8PSK (o_I8PSK),
.o_Q8PSK (o_Q8PSK),
.o_I8PSKs (o_I8PSKs),
.o_Q8PSKs (o_Q8PSKs),
.o_mod_T (o_mod_T),
.o_Nmod_T (o_Nmod_T),.o_modc_R (o_modc_R),
.o_mods_R (o_mods_R),
.o_Ifir_R (o_Ifir_R),
.o_Qfir_R (o_Qfir_R),
.o_wbits (o_wbits),
.o_bits (o_bits),
.o_bits_head (o_bits_head),
.o_peak (o_peak),
.o_en_data (o_en_data),
.o_en_pn (o_en_pn),
.o_frame_start(o_frame_start),
.o_dec_enable (o_dec_enable),
.o_dec (o_dec),
.o_error_num (o_error_num),
.o_total_num (o_total_num)
);initial
begini_clk = 1'b1;i_rst = 1'b1;i_SNR =7;//这个地方可以设置信噪比,数值大小从0~50,#1200i_rst = 1'b0;
endalways #5 i_clk=~i_clk;//显示发射端带相位旋转的星座图
integer fout1;
integer fout2;
integer fout0;
initial beginfout0 = $fopen("en.txt","w");fout1 = $fopen("It.txt","w");fout2 = $fopen("Qt.txt","w");
endalways @ (posedge dat_clk)beginif(i_rst==0)begin$fwrite(fout0,"%d\n",o_en);$fwrite(fout1,"%d\n",o_Ifir_R);$fwrite(fout2,"%d\n",o_Qfir_R);endelse begin$fwrite(fout1,"%d\n",0);$fwrite(fout1,"%d\n",0);$fwrite(fout2,"%d\n",0);end
endendmodule
0sj2_086m5.参考文献
[1]王静.8PSK+TCM编码调制解调技术[D].南京理工大学[2025-08-14].DOI:10.7666/d.y2062697.
6.完整算法代码文件获得
完整程序见博客首页左侧或者打开本文底部
V