ROS2学习(1)—基础概念及环境搭建
文章目录
- 核心框架
- 环境搭建
- 小乌龟机器人控制
- 小乌龟启动
- 键盘控制启动
- rqt查看ros节点关系
核心框架
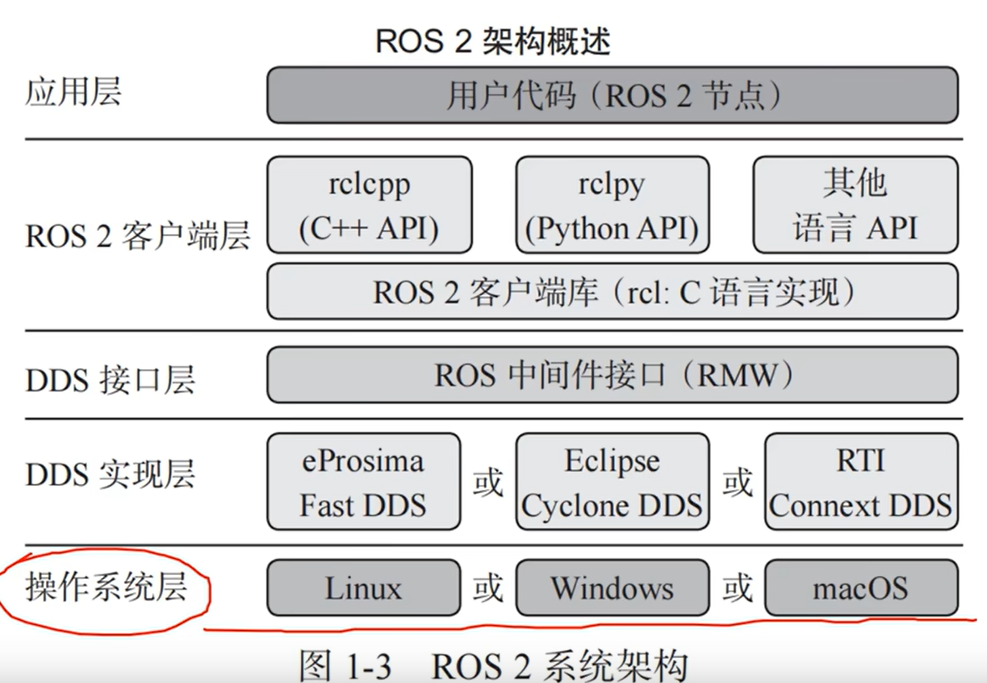
这里有几个比较重要的概念:
四大通信机制:话题(Topic)、服务(Service)、动作(Action)、参数(Param)
调试工具:Rviz(可视化工具)、Gazebo(仿真工具)、ROS bag(录制包等工具)、rqt(可视化节点关系)
建模运动学工具:运动学坐标系转换及管理TF工具、机器人结构、关节、传感器等信息的文件格式URDF
应用框架:Navigation2应用框架、机械臂运动规划Moveit2应用框架
环境搭建
这里我用的22.04版本ubuntu,以及humble版本的ros2。
这里使用鱼香大佬的ros2工具,直接在虚拟机中输入以下命令安装
sudo apt update
wget http://fishros.com/install -O fishros && bash fishos
先输入1(安装ros)回车,再选择1(更换系统源并继续安装)继续回车,继续1(仅更换系统源)并回车,接着选择ros2版本,1选择humble,继续1选择安装桌面版,等待执行完成即可。
安装完成之后,开一个新的终端,能补全ros2就说明安装成功
小乌龟机器人控制
小乌龟启动
启动turtlesim包中的turtlesim_node可执行程序
ros2 run turtlesim turtlesim_node

键盘控制启动
ros2 run turtlesim turtle_teleop_key
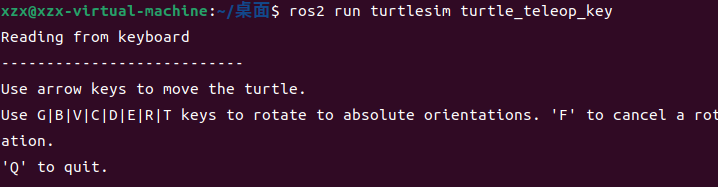
通过按键控制小乌龟的前进
rqt查看ros节点关系
rqt
通过Plugins - Introspection - Node Graph进入后刷新一下就能看到
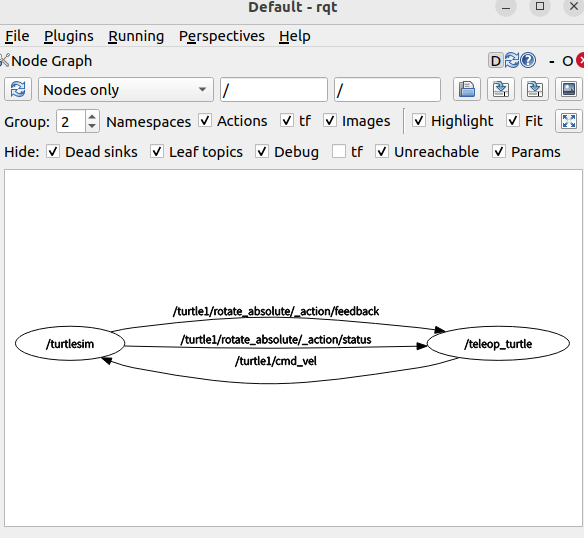
其中的cmd_vel便是由teleop_turtle键盘控制发布话题到/turtlesim,接收到话题后进行相应动作
到此,完成ros2世界的hello world!