低延迟RTSP|RTMP视频链路在AI驱动无人机与机器人操控中的架构实践与性能优化
引言:视觉链路,AI 决策的“神经高速公路”
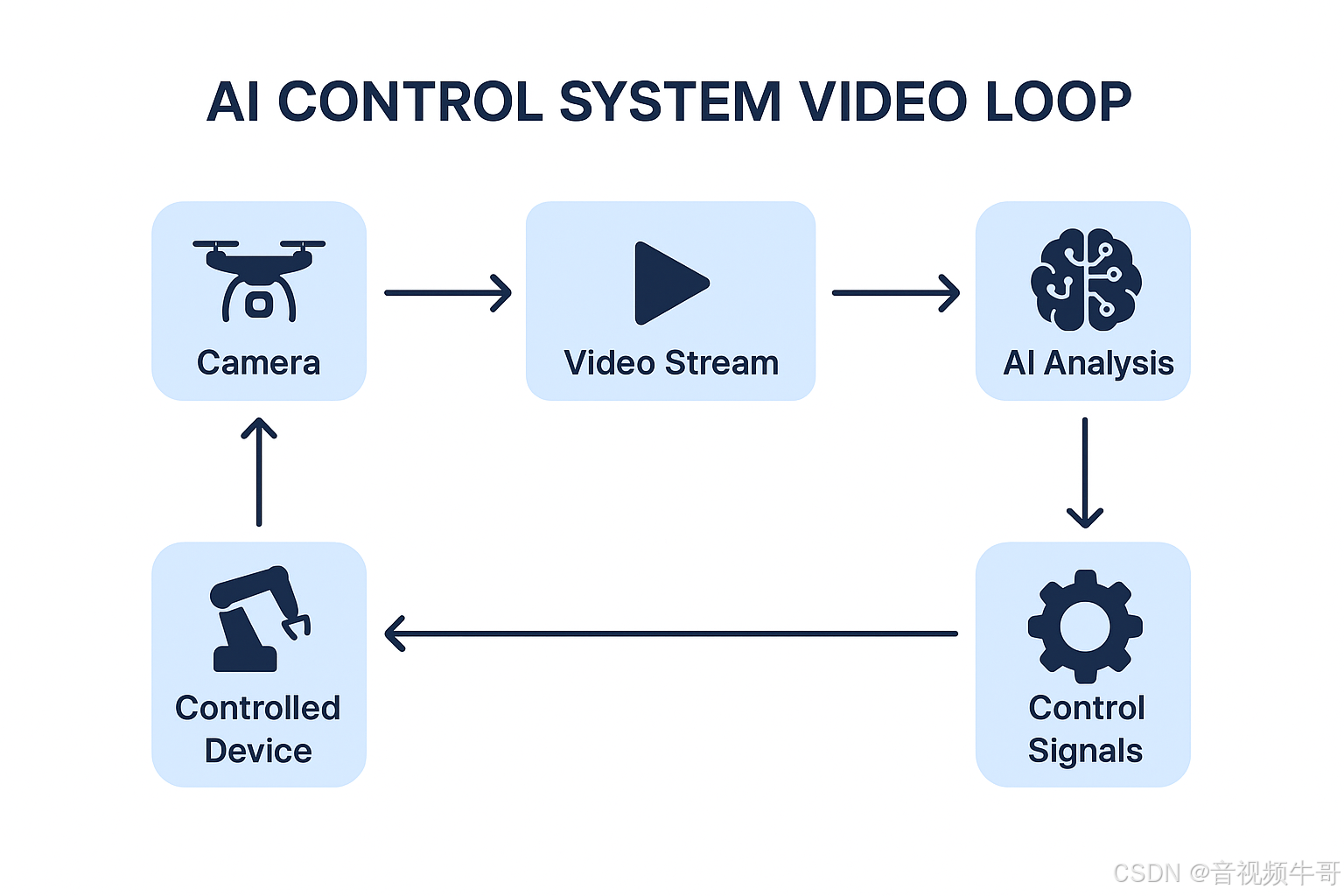
在 AI 驱动的无人机、智能机器人、远程机械臂等操控类系统中,视觉链路早已不再只是“把画面传过去”那么简单,而是演变成实时感知 + 决策闭环的关键基础设施。它的作用,就像人类的神经系统——眼睛捕捉到的每一帧画面,都会直接影响大脑(AI 模型)的判断与肢体(执行机构)的动作。
当一架无人机在高压输电线路上方巡检时,延迟 500ms 可能意味着它已经越过了障碍物;当一个巡逻机器人在商场里跟踪可疑目标时,哪怕 1 秒的画面卡顿,也足以让目标脱离视野;当远程机械臂在化工厂执行危险作业时,链路抖动甚至可能引发安全事故。
在这些场景下,延迟、稳定性与可控性,不再只是体验指标,而是系统安全性与任务成败的决定性因素。
然而,现实中常见的痛点依然存在:
-
延迟过高 → AI 检测到障碍时,执行机构已错过最佳反应时机
-
链路抖动 → 画面不连续导致 AI 判断失真,路径规划失效
-
部署复杂 → 必须额外搭建流媒体服务器,增加硬件成本与运维压力
大牛直播SDK(SmartMediaKit)针对这些痛点,提供可直接嵌入终端设备的跨平台低延迟音视频链路能力,将采集、编码、传输、播放、转发、录像、分析全部整合在同一套架构中,不仅减少中间环节带来的延迟,还能与 AI 推理引擎无缝对接,形成从视觉采集到决策执行的完整闭环,让 AI “看到”的每一帧画面都能快速、稳定地转化为可执行的指令。
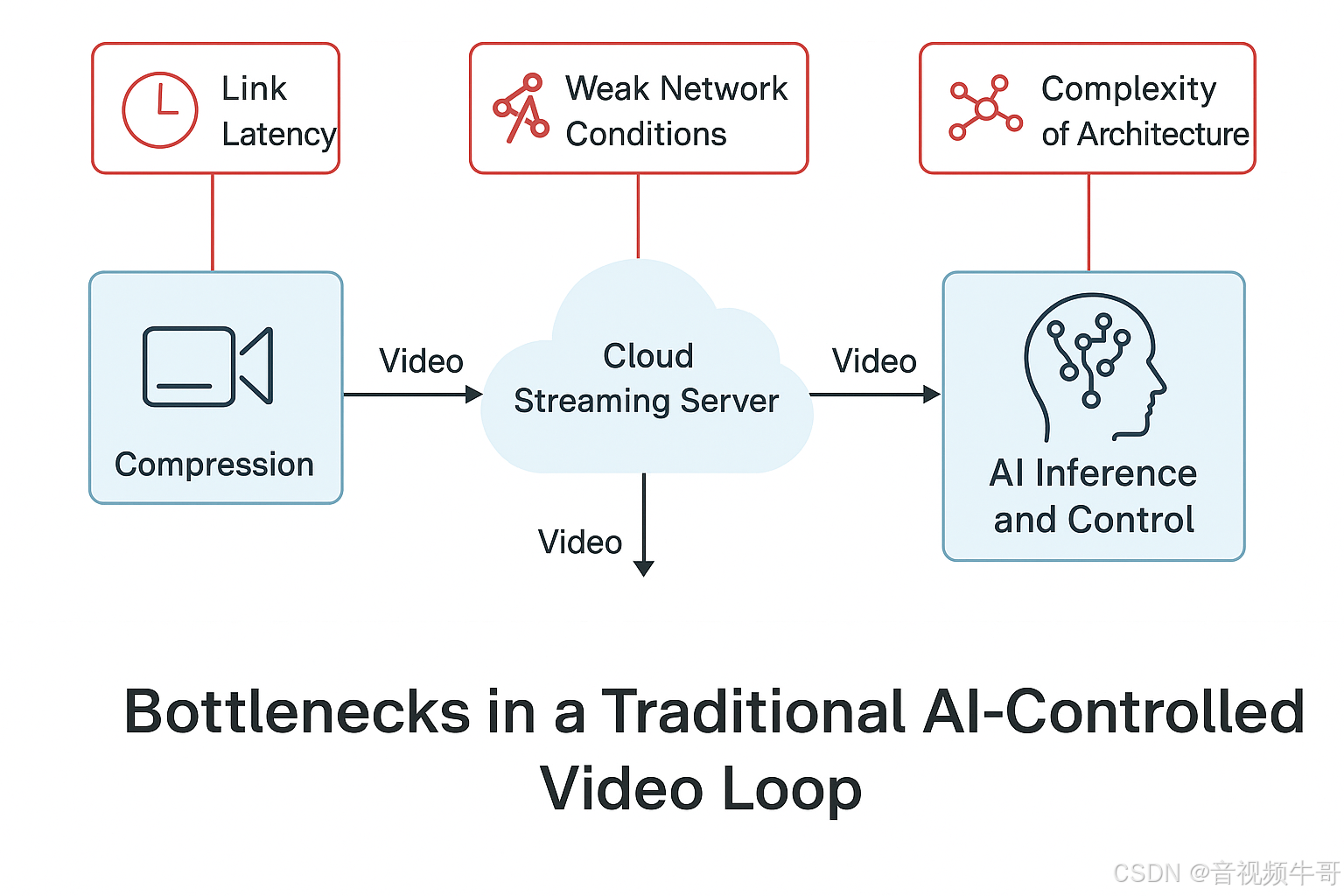
1. 技术挑战:AI 驱动操控的三大链路瓶颈
虽然 AI 算法和算力在近几年突飞猛进,但在真实的无人机、智能机器人、远程机械臂等操控场景中,视频链路的性能仍是整个系统的“天花板”。这条链路不仅要把图像送到 AI 模型,更要在毫秒级内完成从采集到决策的全流程,否则再先进的算法也会因为延迟与抖动而“掉链子”。
(1) 链路延迟
常规基于公网、传统流媒体协议的传输链路,延迟往往在 1~3 秒之间,这对于操控类任务来说几乎不可用。尤其是高速移动场景(如无人机航拍、室外巡逻机器人),AI 识别结果延迟一秒,就足以让设备错过安全避让的时间窗口。
(2) 弱网适配能力不足
很多作业环境(山区、电力线路、化工厂、港口等)网络覆盖不稳定,丢包、抖动频繁发生。普通播放器和推流方案在弱网下容易花屏、断流,导致 AI 模型接收到的画面不完整或中断,决策精度大幅下降。
(3) 架构复杂性高
传统视频链路需要依赖独立的流媒体服务器(Nginx-RTMP、SRS 等)进行转发,这意味着开发团队必须额外配置、维护一整套传输基础设施,并解决多协议兼容、带宽调度、安全访问等问题。对于希望快速落地的 AI 项目,这会极大延缓集成周期,并提高系统运维难度与成本。
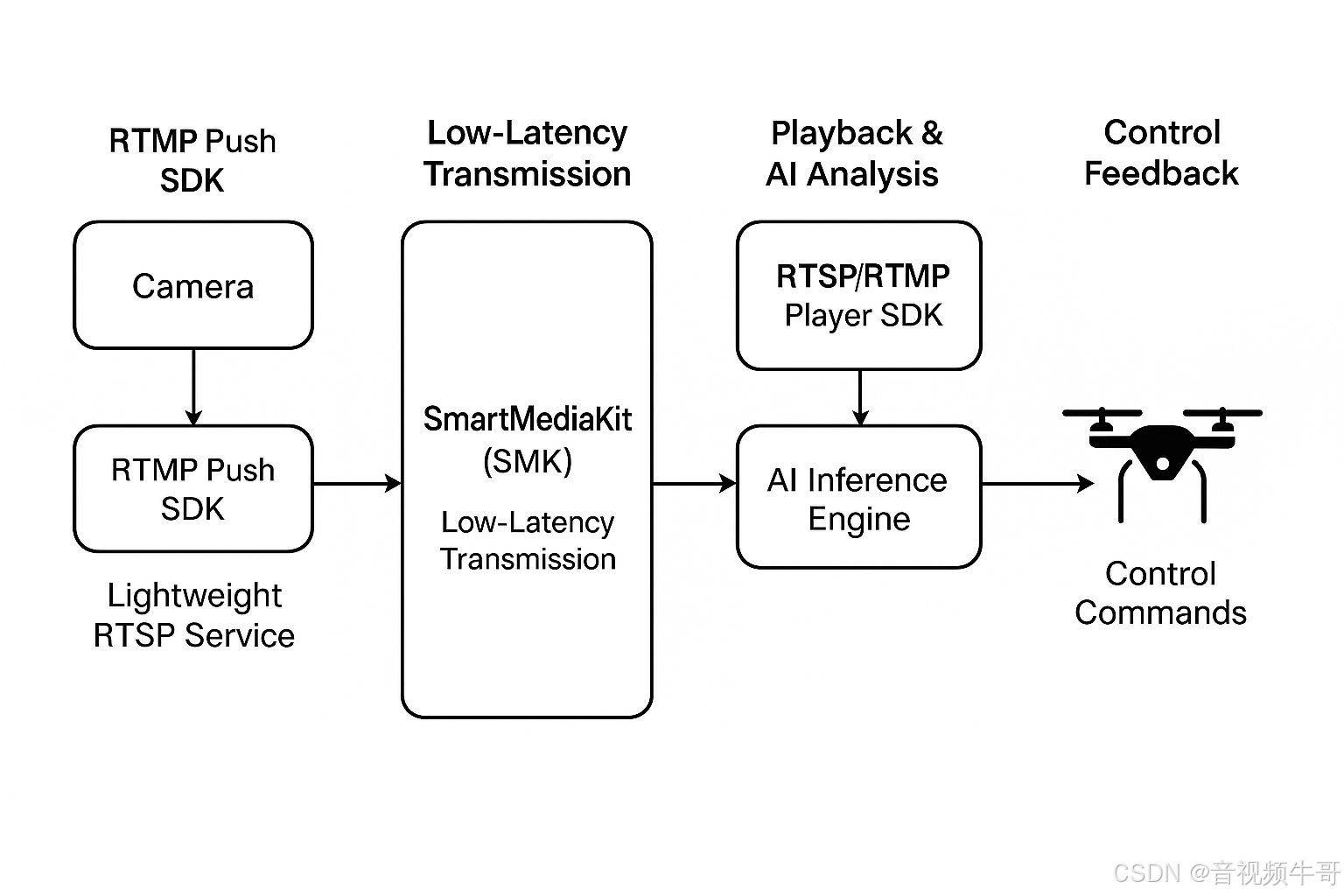
2. 架构方案:大牛直播SDK驱动的低延迟AI控制闭环
针对传统 AI 控制视频链路在延迟、弱网适配与架构复杂性上的三大痛点,大牛直播SDK(SmartMediaKit)采用可嵌入终端的模块化设计,将视频采集、编码、传输、播放、转发、录像及 AI 分析接入,整合为端到端的低延迟闭环链路,避免了对额外流媒体服务器的依赖。
在这一架构下,数据流与控制流可以高效交互:
-
采集与编码(Capture & Encode)
-
支持多种采集源(工业摄像头、机载相机、全景摄像头等)
-
硬件编码加速(NVENC、VideoToolbox、MediaCodec)
-
延迟控制在毫秒级,确保第一帧图像快速进入链路
-
-
低延迟传输(Low-Latency Transmission)
-
RTSP / RTMP / HTTP-FLV 全协议支持
-
UDP / TCP 自适应切换,弱网条件下可启用 FEC(Forward Error Correction)
-
内置轻量级 RTSP 服务模块,可直接在无人机飞控板、机器人中控机上发布视频流
-
-
播放与AI分析(Playback & AI Analysis)
-
播放端可直接嵌入 AI 推理引擎,实现边播放边分析
-
支持 OpenGL / DirectX 渲染接口,方便与图像识别、目标跟踪、SLAM 等模块对接
-
延迟模式可控制在 100~250ms,满足操控级闭环
-
-
控制回传(Control Feedback)
-
AI 推理结果可通过 MQTT / WebSocket / 自定义协议实时回传终端
-
终端立即执行动作,并将结果再次通过视频链路反馈给 AI 模型,实现“持续闭环”
-
这种架构使得 AI 控制系统可以像人的视觉-大脑-动作神经回路一样流畅工作,既减少中间环节延迟,又提升了链路的稳定性与部署灵活度。
Android平台Unity共享纹理模式RTMP播放延迟测试
Android平台RTSP播放器时延测试
Android平台RTMP直播播放器延迟测试
3. 模块组合示例:从无人机到机器人的一体化方案
大牛直播SDK(SmartMediaKit)采用模块化架构,不同场景只需按需组合功能模块即可快速构建整套低延迟视频链路。以下是几个典型的 AI 驱动操控场景与对应的模块选型:
| 场景 | 运行平台 | 推荐模块组合 | 技术要点 |
|---|---|---|---|
| 无人机低空巡检 | Linux ARM64(飞控板) + Android(手持终端) | RTMP Push SDK + Lightweight RTSP Service SDK + RTSP Player SDK | 机载端直接推流至指挥端,支持多路摄像头并发;指挥端低延迟播放并实时标注 AI 识别结果。 |
| 室内巡逻机器人 | Linux x86_64(机器人主控) + 边缘计算节点 | Lightweight RTSP Service SDK + RTSP Player SDK | 机器人提供本地 RTSP 视频流,边缘节点实时拉流到 AI 推理模块执行人形检测、路径规划。 |
| 远程机械臂操控 | Windows(操控台) + Linux ARM64(机械臂控制器) | RTSP Player SDK + One-to-One Interactive Module | 低延迟双向视频交互,保障精密作业安全,支持延迟稳定在 200ms 以内。 |
| 港口自动化集装箱吊装 | Linux x86_64(边缘服务器) + 云端 AI 平台 | RTSP-to-RTMP Relay Module + RTMP Player SDK | 摄像头视频流先转封装为 RTMP,推送到云端进行 AI 智能识别与调度决策。 |
| 矿区巡检车队 | Android(车载终端) + 边缘 AI 服务器 | RTMP Push SDK + RTSP Player SDK | 弱网环境下可启用 UDP 低延迟模式,并配合 FEC 纠错,确保 AI 分析画面完整性。 |
技术优势总结:
-
按需加载 → 无需引入整套 SDK 功能,降低终端资源占用
-
跨平台无缝衔接 → 不同终端可直接互通,无需额外协议网关
-
快速集成 → 单个模块可在 1~2 天内集成并上线
4. 性能优势:为操控级AI闭环而生
在无人机、机器人、远程机械臂等操控场景中,视频链路的延迟、稳定性与可靠性直接决定了 AI 决策的执行价值。相比传统流媒体架构,基于大牛直播SDK的低延迟闭环方案在性能上具备显著优势:
(1) 端到端超低延迟
-
低延迟模式下,端到端延迟稳定在 100~250ms,满足操控级实时性需求
-
采用硬件编解码(NVENC、VideoToolbox、MediaCodec)减少处理延迟
-
内置自适应缓冲区,确保延迟稳定而不牺牲流畅度
(2) 嵌入式部署与跨平台支持
-
支持 x86_64 / ARM64 架构,可运行在NVIDIA Jetson、RK3588、树莓派等边缘计算平台
-
统一的 API 设计,支持 Windows / Linux / Android / iOS / Unity3D
-
模块化加载,避免资源浪费,尤其适合资源受限的飞控板与机器人主控
(3) 弱网环境适应性
-
动态码率自适应(ABR),在 4G/5G、卫星网络等高波动链路中自动优化画质与延迟平衡
-
支持 TCP/UDP 自动切换,确保链路不中断
(4) 无需额外流媒体服务器
-
轻量级 RTSP 服务模块可直接运行在终端设备,无需搭建独立服务器
-
减少中间转发环节,降低延迟与架构复杂度
-
对 AI 推理平台友好,可直接拉取终端视频流进行分析
5. 展望:AI × 视频链路的协同进化
从无人机到巡逻机器人,从远程机械臂到港口自动化吊装,这些案例都指向同一个趋势:
未来的操控类 AI 系统,将从“视频辅助”迈向“视频驱动”,而低延迟、可控、稳定的视频链路将成为系统的神经中枢。
趋势 1:从“人控”到“AI主导”的链路演变
-
过去:视频链路主要服务于人类操作者,AI 仅做辅助分析
-
未来:视频流将首先送入 AI 模型进行感知与决策,人的操作更多作为安全兜底
-
对链路要求:延迟更低、稳定性更高、数据可直接被 AI 消费
趋势 2:边缘智能与链路融合
-
越来越多 AI 推理将下沉到采集端(无人机飞控板、机器人中控机)
-
视频链路与推理引擎将形成“一体化节点”,减少传输与处理环节
-
对链路要求:具备推理前的视频预处理与多路分发能力
趋势 3:多模态数据的统一传输
-
视频将与 LiDAR(激光雷达)、红外热像、IMU(惯性测量单元)等传感器数据融合
-
视频链路需要承担多模态数据的同步与对齐
-
对链路要求:支持多种数据类型的同步封装与时间戳管理
大牛直播SDK的未来定位
作为跨平台、模块化、可嵌入的实时音视频基础框架,大牛直播SDK(SmartMediaKit)在未来操控类系统中将扮演三重角色:
-
低延迟视频通道核心
-
在任何硬件与网络条件下,确保 AI 看到的画面“足够快、足够稳”
-
-
AI 接入的边缘节点
-
提供推理前的视频预处理、帧提取、智能分发等能力,让 AI 模型更高效地利用视频数据
-
-
多模态融合管道
-
扩展到视频 + 传感器数据的统一传输层,为未来的多模态 AI 系统打下基础
-
在这个趋势下,低延迟视频链路不再只是“技术选项”,而是所有实时 AI 控制系统的必选项。
而大牛直播SDK,正是让这条“视觉神经高速公路”稳定、高效、可持续演进的核心基建。
📎 CSDN官方博客:音视频牛哥-CSDN博客