CVPR2025W | S-EO 遥感几何感知阴影检测大规模数据集, 将开源
论文介绍
题目:S-EO: A Large-Scale Dataset for Geometry-Aware Shadow Detection in Remote Sensing Applications
会议:Earthvision 2025 (CVPR Workshop)
论文:https://arxiv.org/abs/2504.06920
主页:https://centreborelli.github.io/shadow-eo/
年份:2025
单位:乌拉圭共和国大学等
视频教程:
这才是科研人该学的!基于深度学习的遥感图像分类实战,一口气学完图像处理、特征提取、分类算法、变化检测、图像配准、辐射校正等7大算法!通俗易懂,新手也能学会!![]() https://www.bilibili.com/video/BV1qYvaePEoE/?spm_id_from=333.337.search-card.all.click&vd_source=75de451a527a341260671f8dfa953400
https://www.bilibili.com/video/BV1qYvaePEoE/?spm_id_from=333.337.search-card.all.click&vd_source=75de451a527a341260671f8dfa953400
核心创新点
-
S-EO 数据集的提出:
-
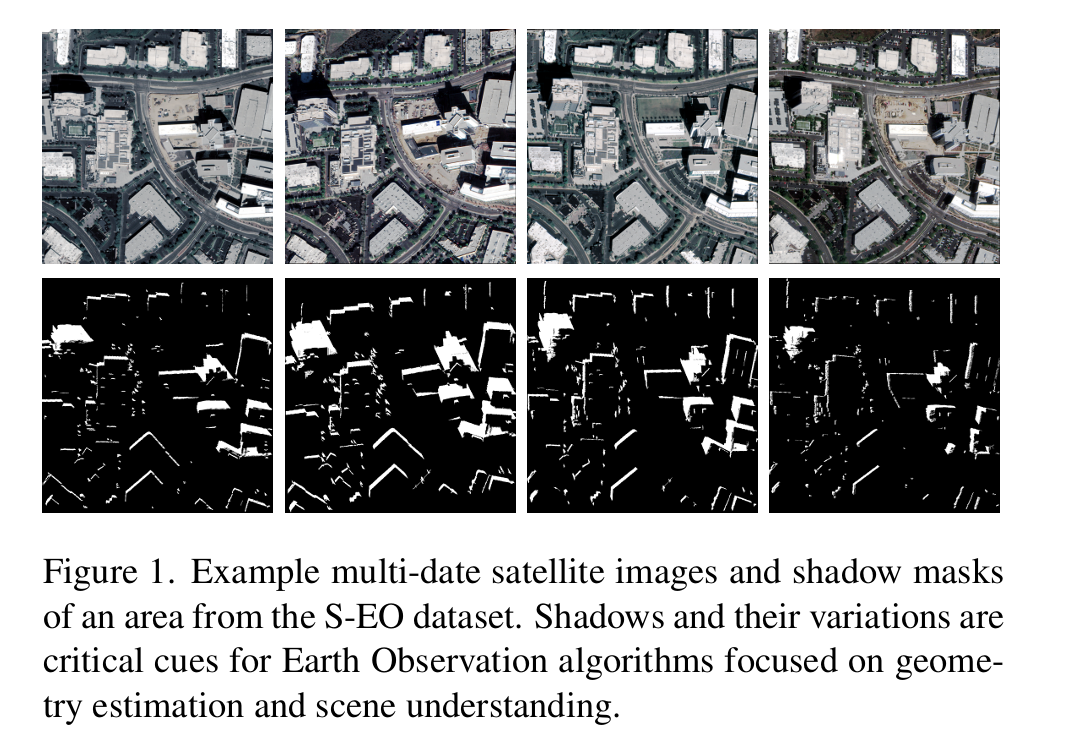
目前最大规模、几何敏感的遥感阴影检测数据集(共702个tile,约2万幅图像)。
-
包含多时相、多视角的 WorldView-3 图像、DSM(LiDAR)以及自动生成的阴影掩膜。
-
-
几何驱动的阴影掩膜自动生成方法:
-
利用 DSM + 太阳角度 + RPC 投影模型,无需人工标注。
-
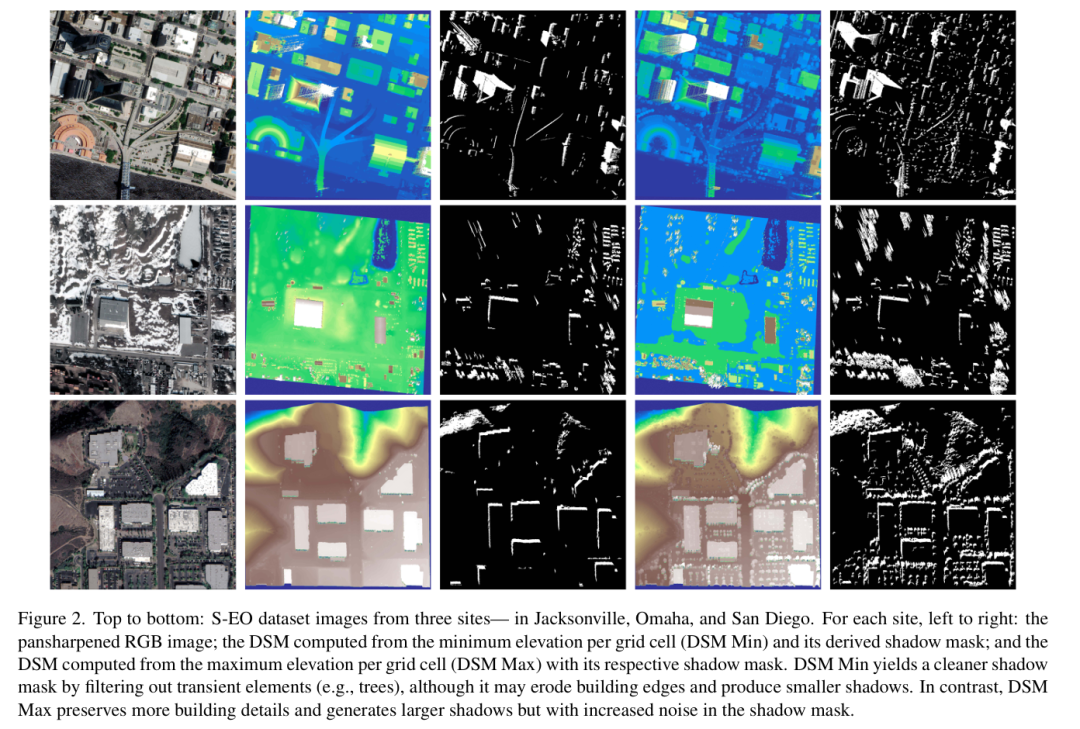
同时生成两种阴影掩膜(基于 DSM min 和 DSM max)以降低误差和偏差。
-
-
阴影监督提升3D重建精度(EO-NeRF 扩展):
-
将阴影掩膜引入 EO-NeRF 训练作为额外监督,显著提高 DSM 重建质量。
-
-
跨域泛化能力验证:
-
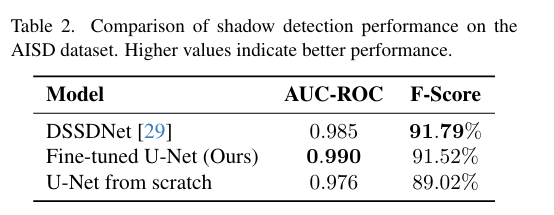
使用 S-EO 预训练模型在 AISD 航空影像数据集上进行微调,仅用10%训练数据即超过原有方法,验证大规模预训练优势。
-
数据
来源:
-
WorldView-3 遥感影像(30cm 分辨率 PAN + RGB);
-
USGS 的 LiDAR DSM(50cm 分辨率);
-
IARPA CORE3D 数据集(Jacksonville, Omaha, San Diego)。
包含内容:
-
每个 tile:500×500 米大小;
-
19,162幅图像 + DSM(min/max)+ NDVI植被掩膜 + 投影模型(RPC)+ 自动生成的阴影掩膜。
阴影掩膜生成方式:
-
基于 DSM 的投影几何+太阳位置模拟(光线追踪);
-
再通过 RPC 将 DSM 中的阴影投影到图像空间。
方法
1. 阴影掩膜自动生成方法
作者提出一种基于地形几何和太阳位置的自动阴影标注方法,用于大规模遥感图像:
-
首先利用 LiDAR 获取的DSM(数字地表模型),结合 拍摄时的太阳角度,模拟地形上的阴影区域;
-
然后将这些阴影从地面几何空间,通过卫星影像的几何模型(RPC) 投影到图像空间,生成图像对应的阴影掩膜;
-
为提高精度,使用了 两种DSM(最小高程和最大高程),生成两套阴影掩膜,并取其一致区域作为更可靠的监督信号;
-
辅助加入 NDVI生成的植被掩膜 和 不确定性区域掩膜,排除树木和低置信区域的干扰。
2. 阴影检测模型训练
-
模型基于经典的 U-Net 和 FSDNet 架构,为遥感阴影检测任务优化;
-
使用上述自动生成的阴影掩膜作为监督信号进行训练;
-
加入了 数据增强和颜色归一化处理,提高跨域泛化能力;
-
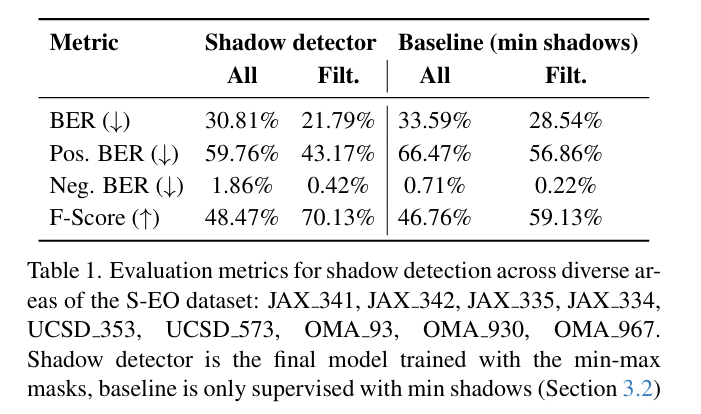
为降低错误监督带来的影响,仅使用两种阴影掩膜重合的区域进行训练。
3. 阴影监督下的3D建模扩展
-
在已有的 EO-NeRF 多视角神经辐射场重建框架中,引入了训练好的阴影掩膜作为辅助监督;
-
利用阴影区域信息,引导神经网络在几何重建中更准确地捕捉建筑边界、立面结构等;
实验与分析
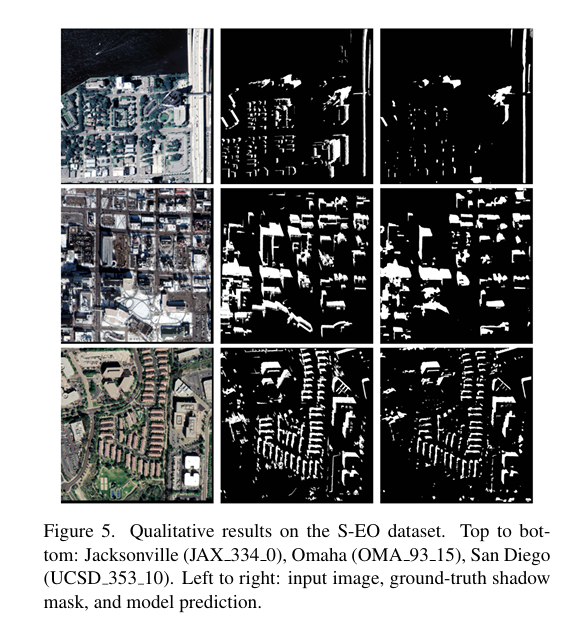
作者在多个城市的遥感数据上验证了模型的阴影检测效果,并证明其具备良好的跨区域泛化能力。进一步将预测的阴影信息应用于3D重建中,显著提升了地形还原的准确性与细节表现。
视频教程:
这才是科研人该学的!基于深度学习的遥感图像分类实战,一口气学完图像处理、特征提取、分类算法、变化检测、图像配准、辐射校正等7大算法!通俗易懂,新手也能学会!![]() https://www.bilibili.com/video/BV1qYvaePEoE/?spm_id_from=333.337.search-card.all.click
https://www.bilibili.com/video/BV1qYvaePEoE/?spm_id_from=333.337.search-card.all.click