数字图像处理(冈萨雷斯)第三版:第四章——空间滤波与频域滤波(平滑与锐化)——主要内容和重点
一.平滑与锐化
1.平滑
图象在获取和传输的过程中,都容易产生噪声
高斯噪声:正态分布概率的噪声(所有像素点都按照正态分布概率受到一定程度的干扰)
椒盐噪声:高斯的亮暗点噪声(随机数量的像素点像素发生突变)
平滑就是去除图像噪声的过程,但是有可能导致图像模糊
2.锐化(用于机器视觉)
当要识别图像中的目标时候,会选择边界作为识别对象
锐化处理可以突出边界,便于识别目标
3.平滑和锐化的对比
平滑:滤除噪声,尽量不影响边界信息
锐化:增强边界,尽量滤除噪声
二.空域滤波
空域滤波:在空间图像,借助模版(空域滤波器)进行邻域操作
1.空域平滑滤波
噪声特征:分布在图像上的突兀异常色点。
不符合附近图像像素变化规律的像素。
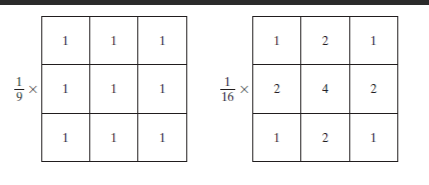
(1)线性平滑滤波器
均值滤波器:用待处理像素及其邻域点的均值或加权均值替代原像素值。(盒式滤波器核)
效果:减小噪声;使图像边界模糊
若要对图像最外侧边缘滤波,应该如何处理?
答:先在最外侧补一排像素,滤波后再去除
在图像边缘处做部分掩膜处理
不处理图像边缘
(2)非线性平滑滤波器
中值滤波器:用掩膜区域像素的中值代替中心像素的灰度值
影响中值滤波效果的因素:模版大小,参与计算的像素数
高斯噪声:均值滤波
椒盐噪声:中值滤波
中值滤波器的缺点:不适合高斯噪声,非线性,不适合细节多的图
(3)边界保持滤波器
图象上的目标之所以能够清晰辨认,是因为目标和背景之间存在边界,即存在灰度和阶跃变化
在图像平滑处理之前,先判断当前像素点是否是边界点,若不是边界点再做平滑处理
(4)双边平滑滤波器
对平坦区域平滑噪声,边界区域增强边界
2.空域锐化滤波
(1)梯度算子(一阶微分算子)
边界点特性:灰度突变
结果:
边缘灰度突变,梯度大;内部变化平缓,梯度小;
整体亮度降低,暗背景下边缘被增强
负数取0或绝对值
缺点:
各向异性
结果无对应点,有错位
结果对噪声敏感
(2)单方向一阶算子(sobel算子)
原理:先平均后差分
(3)二阶微分锐化(拉普拉斯算子)
图像边界更细节,细节信息更多
(4)高增益增强
原图系数k,可调节原图在输出图像中的占的比重
(5)平滑和锐化模版的关系
平滑模版加锐化模版等于原图像
三.频域滤波
1.图像傅里叶变换
生活现象:三棱镜可以将光线分解成不同的频率分量
图像变换概念:通过某种数学映射方法,将图像信息变换到其他域进行分析的手段,是对原图做二维线性可逆变换
由不同基函数可以形成不同图像变换
离散傅里叶变换:最常用的变换
离散余弦变换:可避免复数运算。缺点是正交函数基雷同
沃尔什变换:元素只有1.-1,运算速度高,便于实时运算
小波变换:可以分析不同时间段的信号时域和频域特性,相当于加窗傅里叶变换
2.二维离散傅里叶变换的性质
(1)频谱的幅值随着频率的增大而迅速减小
(2)可分离性
二维傅里叶变换可以分成俩个方向的一维傅里叶变换依次变换进行
(3)共轭对称性
频谱幅值关于原点对称
(4)平移
图像在空间域平移不影响其频域幅值变化
(5)线性
可叠加性
(6)频域和空域的联系
频率零频分量,直流分量;对应图像的平均灰度级
低频分量:对应缓慢变化的灰度
高频分量:对应快速变换的灰度(边界)
频域滤波:90%的能量集中在1%的面积,总能量10%的高频部分决定图像的信息
3.频域平滑滤波
(1)理想低通滤波器
滤除高频分量,保留低频分量,抑制噪声
振铃现象:空域图像出现周期性圆环
(2)巴特沃斯低通滤波器
抑制振铃现象
4.频域锐化滤波
(1)理想高通滤波器
滤除低频分量,保留高频分量,保留细节,留下轮廓