deepseek、GPT与claude在MATLAB编程上的准确性对比——以卡尔曼滤波调试为例

本文给出deepseek、GPT与claude在卡尔曼滤波调参上的编程性能对比,用一维的非线性KF为例,比较调试后的误差大小。
文章目录
- 准备工作
- 测试代码
- 调试过程
- deepseek
- ChatGPT
- claude
- 调试结果
- deepseek
- ChatGPT
- claude
- 结论
准备工作
测试代码
% 一维卡尔曼滤波示例
clear; clc;% 仿真参数
n = 100; % 数据点数
dt = 0.1; % 时间间隔% 真实状态(匀速运动)
true_pos = zeros(n, 1);
true_vel = 2; % 真实速度
for i = 2:ntrue_pos(i) = true_pos(i-1) + true_vel * dt;
end% 生成带噪声的观测数据
measurement_noise = 0.5;
measurements = true_pos + measurement_noise * randn(n, 1);% 卡尔曼滤波器初始化
x = [0; 0]; % 初始状态 [位置; 速度]
P = [1 0; 0 1]; % 初始协方差矩阵% 系统模型矩阵
F = [1 dt; 0 1]; % 状态转移矩阵
H = [1 0]; % 观测矩阵
Q = [0.01 0; 0 0.01]; % 过程噪声协方差
R = measurement_noise^2; % 观测噪声协方差
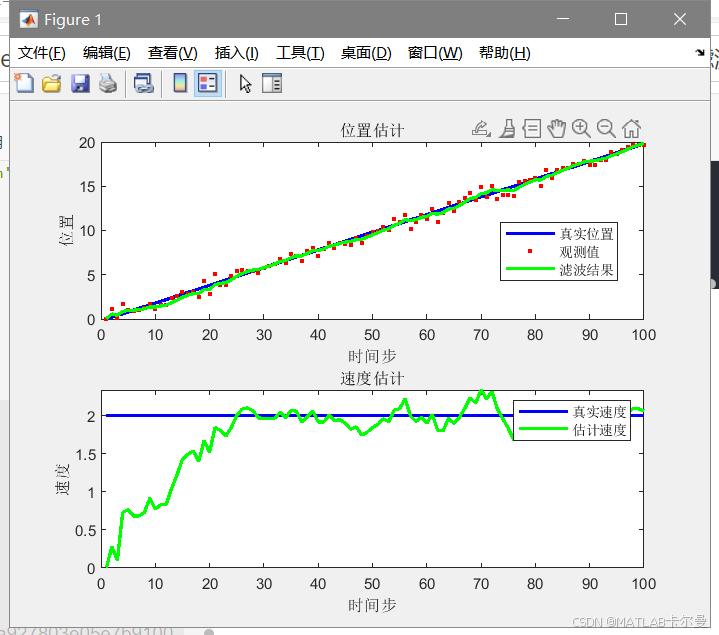
输出:
调试过程
调试命令:
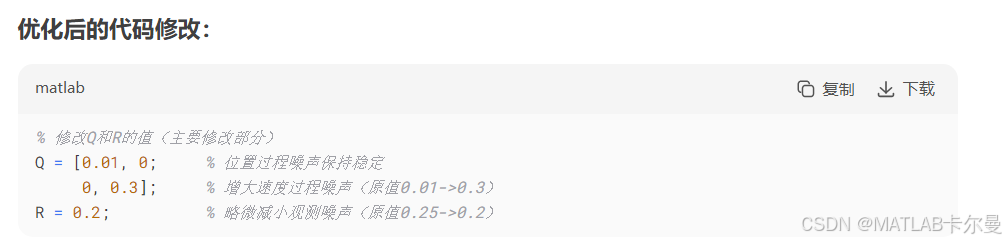
RMSE较大,通过调节Q和R来降低RMSE
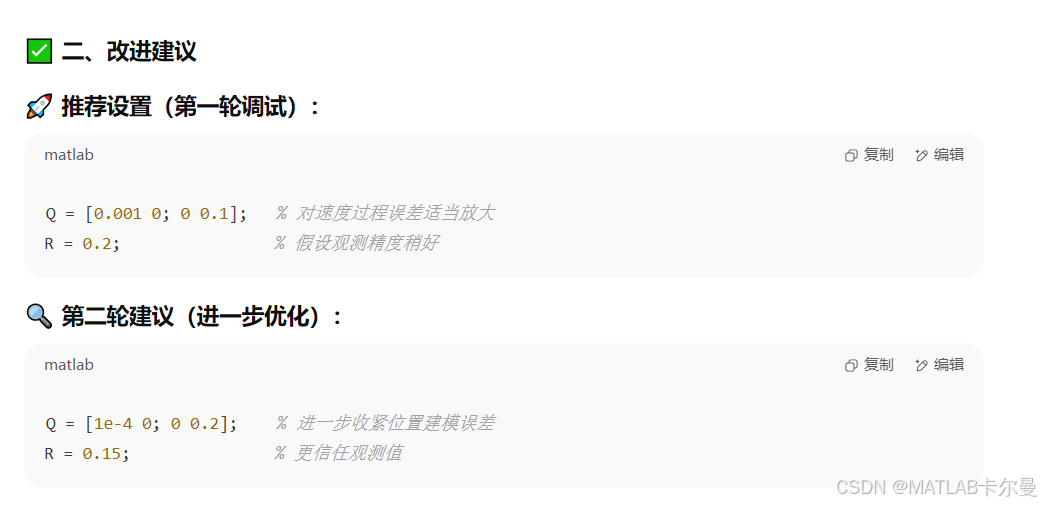
deepseek
模型:R1

ChatGPT
模型:4o

claude
模型:sonnet4

调试结果
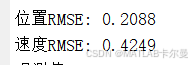
deepseek
结果:
ChatGPT
结果:

claude
结论
deepseek的速度RMSE优化比ChatGPT好,但位置RMSE优化程度不行。
claude的速度和位置RMSE均能优化到较低的水平
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者