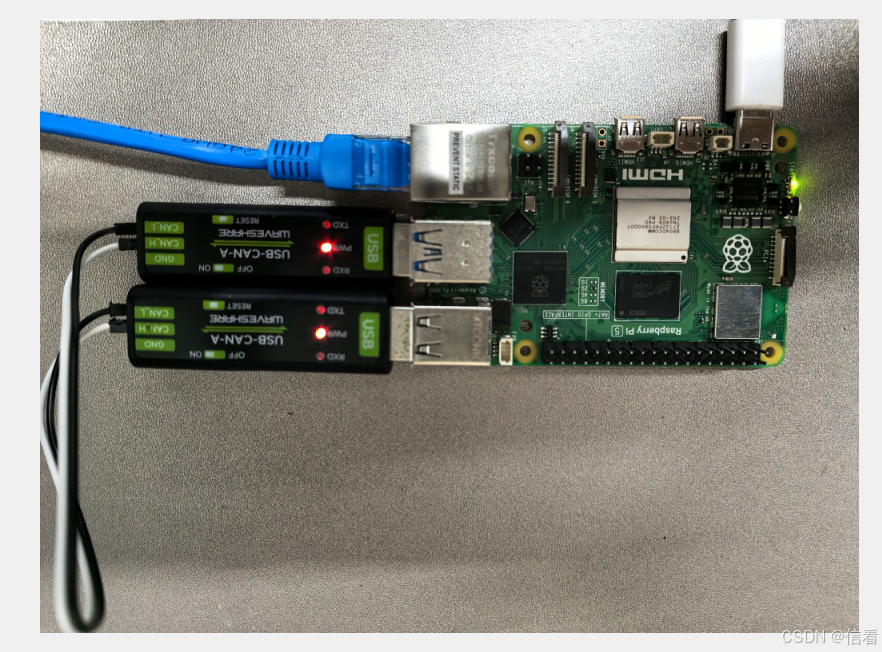
两个USB-CAN-A收发测试
硬件连接
#接受
import serial
import sysdef calculate_checksum(data):"""Calculate checksum for configuration commands"""checksum = sum(data[2:])return checksum & 0xffdef print_can_message(frame_type, frame_format, can_id, data, can_rate, raw_frame):"""Print received CAN message in categorized format with raw frame"""print("\n" + "="*50)print("CAN Message Received".center(50))print("="*50)print(f"{'ID (HEX)':<20}: {can_id}")print(f"{'Frame Type':<20}: {frame_type}")print(f"{'Frame Format':<20}: {frame_format}")print(f"{'Data Frame (HEX)':<20}: {data}")print(f"{'CAN Rate (bps)':<20}: {can_rate}")print(f"{'Raw Frame':<20}: {raw_frame}")print("="*50 + "\n")def main():# ConfigurationCAN_RATE = 500000 # 500kbps (matches our configuration)print("CAN Message Receiver Program")print("="*50)print("The converter supports two protocols:")print("- Fixed 20-byte protocol")print("- Variable length protocol (selected)")print("Ensure variable length protocol is selected in the converter software")print("="*50 + "\n")try:# Initialize serial portser = serial.Serial("/dev/ttyUSB0", 2000000, timeout=1)print(f"Serial port {ser.portstr} opened at 2,000,000 baud")# Configure CAN interface (500kbps, Extended Frame)set_can_baudrate = [0xaa, 0x55, 0x12, 0x03, 0x02, 0x00, 0x00, 0x00, 0x00,0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00]# Add checksum and send configurationchecksum = calculate_checksum(set_can_baudrate)set_can_baudrate.append(checksum)ser.write(bytes(set_can_baudrate))print("CAN interface configured: 500kbps, Extended Frame, Normal Mode")# Main reception loopprint("\nWaiting for CAN messages...\n")while True:# Read packet header (2 bytes)header = ser.read(2)if len(header) != 2:continue# Check for valid header (0xAA followed by byte with 0xC0 mask)if header[0] == 0xaa and (header[1] & 0xc0) == 0xc0:# Parse header informationdata_len = header[1] & 0x0fframe_format = "Data Frame" if (header[1] & 0x10) == 0x00 else "Remote Frame"frame_type = "Standard Frame" if (header[1] & 0x20) == 0x00 else "Extended Frame"# Determine remaining bytes to readremaining_bytes = (data_len + 3) if frame_type == "Standard Frame" else (data_len + 5)# Read remaining messagemessage = ser.read(remaining_bytes)if len(message) != remaining_bytes:print("Error: Incomplete message received")continue# Check for valid end code (0x55)if message[-1] != 0x55:print("Error: Invalid message end code")continue# Combine header and message for raw frameraw_frame = list(header) + list(message)hex_raw_frame = [f"0x{byte:02X}" for byte in raw_frame]# Extract CAN ID and dataif frame_type == "Standard Frame":can_id = (message[1] << 8) + message[0]can_data = message[2:2+data_len] if data_len > 0 else []else: # Extended Framecan_id = (message[3] << 24) + (message[2] << 16) + (message[1] << 8) + message[0]can_data = message[4:4+data_len] if data_len > 0 else []# Format outputhex_id = f"0x{can_id:0{'4' if frame_type == 'Standard Frame' else '8'}X}"hex_data = [f"0x{byte:02X}" for byte in can_data] if can_data else ["No Data"]# Print categorized message with raw frameprint_can_message(frame_type, frame_format, hex_id, hex_data, CAN_RATE, hex_raw_frame)except serial.SerialException as e:print(f"Serial port error: {e}")except KeyboardInterrupt:print("\nProgram terminated by user")finally:if 'ser' in locals() and ser.is_open:ser.close()print("Serial port closed")if __name__ == "__main__":main()
#发送
import serial
import timeprint("The converter is equipped with two built - in conversion protocols, \none is a fixed 20 byte protocol and the other is a variable length protocol. \nPlease ensure that the variable length protocol is selected in the supporting software \nand click the Set and Start button to issue a configuration command to the converter")t = serial.Serial("/dev/ttyUSB1", 2000000)print(t.portstr)def calculate_checksum(data):checksum = sum(data[2:])return checksum & 0xffset_can_baudrate = [0xaa, # 0 Packet header0x55, # 1 Packet header0x12, # 3 Type: use variable protocol to send and receive data## 0x02- Setting (using fixed 20 byte protocol to send and receive data), 0x12- Setting (using variable protocol to send and receive data)##0x03, # 3 CAN Baud Rate: 500kbps ## 0x01(1Mbps), 0x02(800kbps), 0x03(500kbps), 0x04(400kbps), 0x05(250kbps), 0x06(200kbps), 0x07(125kbps), 0x08(100kbps), 0x09(50kbps), 0x0a(20kbps), 0x0b(10kbps), 0x0c(5kbps)##0x02, # 4 Frame Type: Extended Frame ## 0x01 standard frame, 0x02 extended frame ##0x00, # 5 Filter ID10x00, # 6 Filter ID20x00, # 7 Filter ID30x00, # 8 Filter ID40x00, # 9 Mask ID10x00, # 10 Mask ID20x00, # 11 Mask ID30x00, # 12 Mask ID40x00, # 13 CAN mode: normal mode ## 0x00 normal mode, 0x01 silent mode, 0x02 loopback mode, 0x03 loopback silent mode ##0x00, # 14 automatic resend: automatic retransmission0x00, # 15 Spare0x00, # 16 Spare0x00, # 17 Spare0x00, # 18 Spare
]# Calculate checksum
checksum = calculate_checksum(set_can_baudrate)
set_can_baudrate.append(checksum)
print(set_can_baudrate)
set_can_baudrate = bytes(set_can_baudrate)# Send command to set CAN baud ratenum_set_baud = t.write(set_can_baudrate)
print(f"Set CAN baud rate command sent, bytes written: {num_set_baud}")time.sleep(1)
print("send CAN ID:0x01234567,extended frame, data:0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88")
send_can_id_data = bytes([0xaa, # 0 Packet header0xe8, # 1 0xc0 Tyep# bit5(frame type 0- standard frame (frame ID 2 bytes), 1-extended frame (frame ID 4 bytes))# bit4(frame format 0- data frame, 1 remote frame)# Bit0~3 Frame data length (0~8)0x67, # 2 Frame ID data 1 1~8 bit, high bytes at the front, low bytes at the back0x45, # 3 Frame ID data 2 1~8 bit, high bytes at the front, low bytes at the back0x23, # 4 Frame ID data 3 1~8 bit, high bytes at the front, low bytes at the back0x01, # 5 Frame ID data 4 9~16 bit, high bytes at the front, low bytes at the back0x11, # 6 Frame data 1 CAN sends data 10x22, # 7 Frame data 2 CAN sends data 20x33, # 8 Frame data 3 CAN sends data 30x44, # 9 Frame data 4 CAN sends data 40x55, # 10 Frame data 5 CAN sends data 50x66, # 11 Frame data 6 CAN sends data 60x77, # 12 Frame data 7 CAN sends data 70x88, # 13 Frame data 8 CAN sends data 80x55, # 14 Frame data 4 CAN sends data 4
])
print(send_can_id_data)
num = t.write(send_can_id_data)
print(num)
t.close()