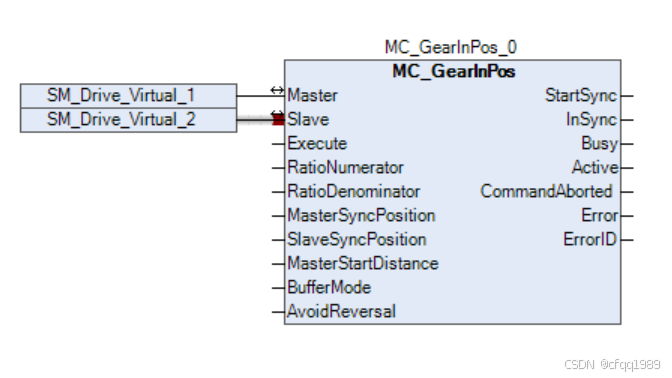
MC_GearInPos电子齿轮
作用:在主轴转到指定角度时,从轴开始跟随。
核心技术是利用轴速度。
MC_GearInPos
主轴
从轴
触发沿
分子【电子齿轮】1
分母 1
主轴同步位置 180【表示第一次主轴转到180度时,从轴正好转到90度
从轴同步位置 90【在主180度后按齿轮比1:1继续,主360度时从270度
主轴开始同步距离 10 【180-10,当主轴170度时,从轴才开始同步,当主180度时,从轴正好转到90度
bufferMode【0立即 1等上个运动完成 2低混合 3混合前一个 4混合后一个 5混合高
避免反向
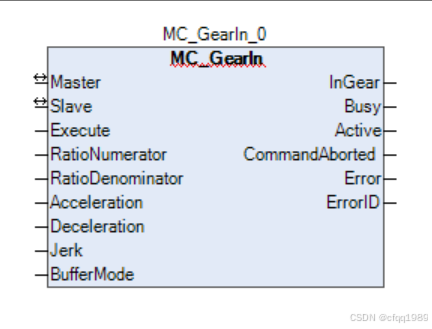
MC_GearIn
主轴
从轴
触发沿
分子【电子齿轮比】
分母
加速度(单圈脉冲当量/秒)50000*60 = 60转/秒
减速度
越速(直接刹停的速度)
BufferMode
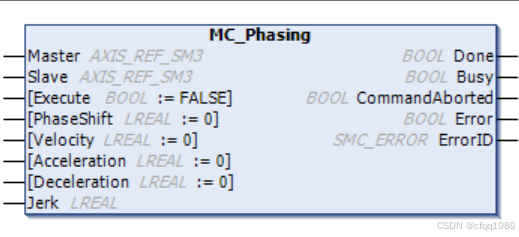
MC_Phasing
主从轴,相位偏移
MC_GearOut
主从轴,脱机