深度图像滤波
深度图像滤波是三维计算机视觉中的核心环节,旨在优化原始深度数据的质量,提升后续任务(如三维重建、物体识别、场景理解)的性能。本文讲解六种常见滤波:1.去噪滤波、2.边缘滤波、3.空域滤波、4.时域滤波、5.填洞滤波及6.各向异性滤波。
深度图像噪声特性与滤波需求
深度图像噪声来源
- 传感器物理噪声:
- TOF相机的飞行时间测量误差(通常为±10-50mm)
- 结构光系统的散斑噪声和相位解缠误差
- 双目视觉的匹配歧义与视差计算误差
- 环境干扰噪声:
- 强光环境下的背景光噪声(如户外阳光干扰)
- 反射表面(金属、玻璃)的多径效应
- 透明或半透明物体导致的错误深度值
- 几何噪声:
- 物体边缘的深度不连续性
- 遮挡区域导致的空洞边界噪声
- 低纹理区域的深度估计不确定性
深度滤波的核心目标
- 噪声抑制:降低随机噪声,提高深度测量的准确性
- 边缘保持:保留物体真实边界,避免过度平滑导致的几何失真
- 数据完整性:填充缺失区域,生成完整的深度图
- 时空一致性:在时间序列中保持深度值的稳定性,减少闪烁现象
一、去噪滤波:消除随机噪声
1.1 传统统计滤波器
- 均值滤波:
- 原理:用邻域像素的平均值替代当前像素值
- 公式:Ifiltered(x,y)=1N∑(i,j)∈ΩI(i,j)I_{filtered}(x,y) = \frac{1}{N} \sum_{(i,j) \in \Omega} I(i,j)Ifiltered(x,y)=N1∑(i,j)∈ΩI(i,j)
- 缺点:模糊边缘,不适用于深度图像
- 中值滤波:
- 原理:用邻域像素的中值替代当前像素值
- 优势:对椒盐噪声有效,能保留边缘
- 变种:自适应中值滤波(根据局部噪声水平调整窗口大小)
- 高斯滤波:
- 原理:基于高斯核的加权平均滤波
- 公式:Ifiltered(x,y)=∑(i,j)∈ΩG(i,j)⋅I(i,j)I_{filtered}(x,y) = \sum_{(i,j) \in \Omega} G(i,j) \cdot I(i,j)Ifiltered(x,y)=∑(i,j)∈ΩG(i,j)⋅I(i,j)
- 特点:平滑效果随σ增大而增强,但会模糊边缘
1.2 基于模型的去噪方法
- 非局部均值滤波(Non-Local Means):
- 原理:通过在整幅图像中寻找相似patch进行加权平均
- 公式:Ifiltered(x)=∑y∈Ωw(x,y)⋅I(y)I_{filtered}(x) = \sum_{y \in \Omega} w(x,y) \cdot I(y)Ifiltered(x)=∑y∈Ωw(x,y)⋅I(y)
- 权重计算:w(x,y)=1Z(x)exp(−∣∣N(x)−N(y)∣∣2h2)w(x,y) = \frac{1}{Z(x)} \exp\left(-\frac{||N(x)-N(y)||^2}{h^2}\right)w(x,y)=Z(x)1exp(−h2∣∣N(x)−N(y)∣∣2)
- 优势:能有效保留纹理细节,对高斯噪声效果显著
- BM3D(Block-Matching 3D):
- 原理:将相似patch分组为3D阵列,在变换域进行协同滤波
- 优势:当前最优的去噪算法之一,PSNR指标领先
- 局限性:计算复杂度高,实时性差
1.3 深度自适应去噪
- 深度域滤波:
- 原理:在深度值空间而非像素空间进行滤波
- 实现:将深度值映射到高维空间,在该空间进行聚类或平滑
- 优势:对深度跳跃区域有更好的适应性
- 基于法线的滤波:
- 原理:利用表面法线信息区分不同平面区域
- 步骤:
- 计算每个像素的表面法线
- 根据法线相似度构建邻域权重
- 基于权重进行加权平均
- 优势:能有效区分相邻平面,保留平面间的边缘
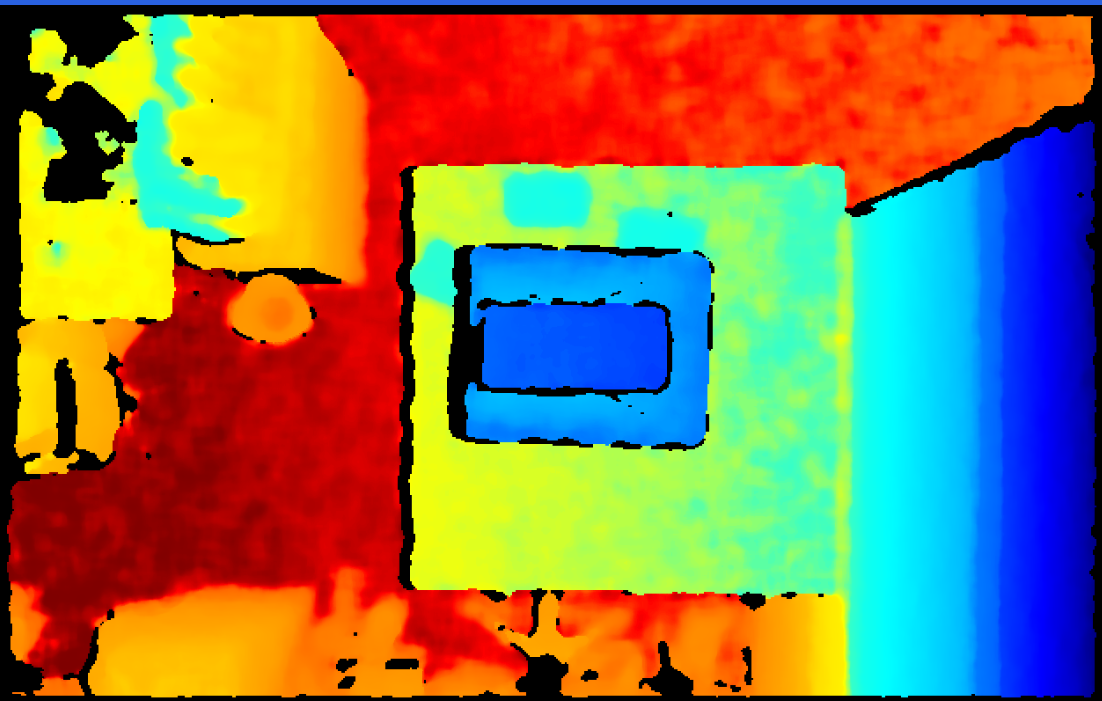
三、边缘滤波:保留几何边界
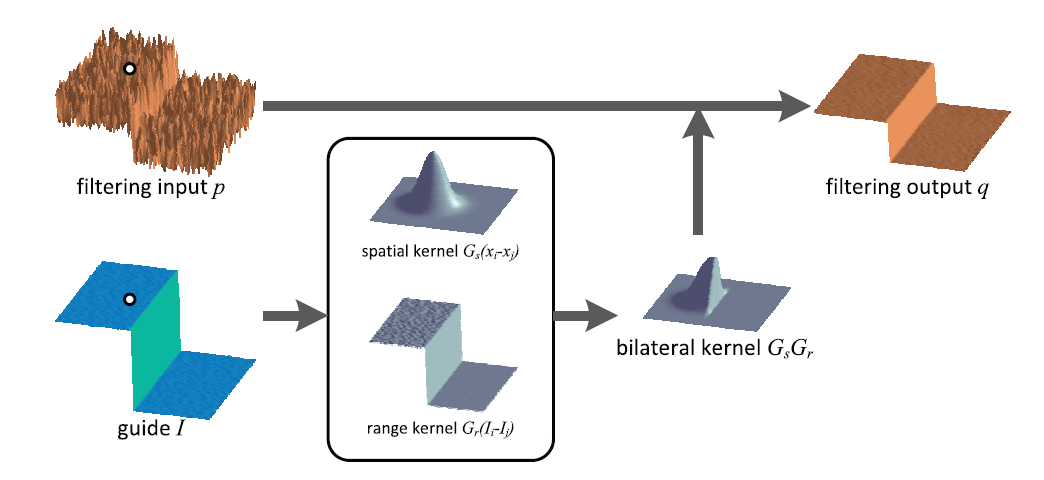
2.1 双边滤波(Bilateral Filter)
- 原理:同时考虑空间距离和像素值差异的加权滤波
Ifiltered(p)=∑q∈Ωw(p,q)⋅I(q)∑q∈Ωw(p,q) I_{\text{filtered}}(p) = \frac{\sum_{q \in \Omega} w(p,q) \cdot I(q)}{\sum_{q \in \Omega} w(p,q)} Ifiltered(p)=∑q∈Ωw(p,q)∑q∈Ωw(p,q)⋅I(q)
其中权重函数为:
w(p,q)=exp(−∣∣p−q∣∣22σs2)⋅exp(−∣∣I(p)−I(q)∣∣22σr2) w(p,q) = \exp\left(-\frac{||p-q||^2}{2\sigma_s^2}\right) \cdot \exp\left(-\frac{||I(p)-I(q)||^2}{2\sigma_r^2}\right) w(p,q)=exp(−2σs2∣∣p−q∣∣2)⋅exp(−2σr2∣∣I(p)−I(q)∣∣2)
- 参数影响:
- σ_s:控制空间邻域大小,影响平滑范围
- σ_r:控制值域相似度阈值,影响边缘保留能力
- 优势:在平滑区域进行滤波,同时保留边缘信息
- 局限性:
- 对大的深度不连续区域效果有限
- 计算复杂度较高(O(N²))
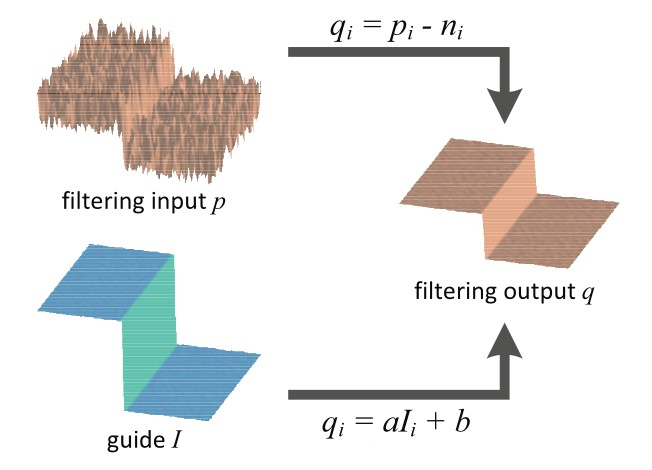
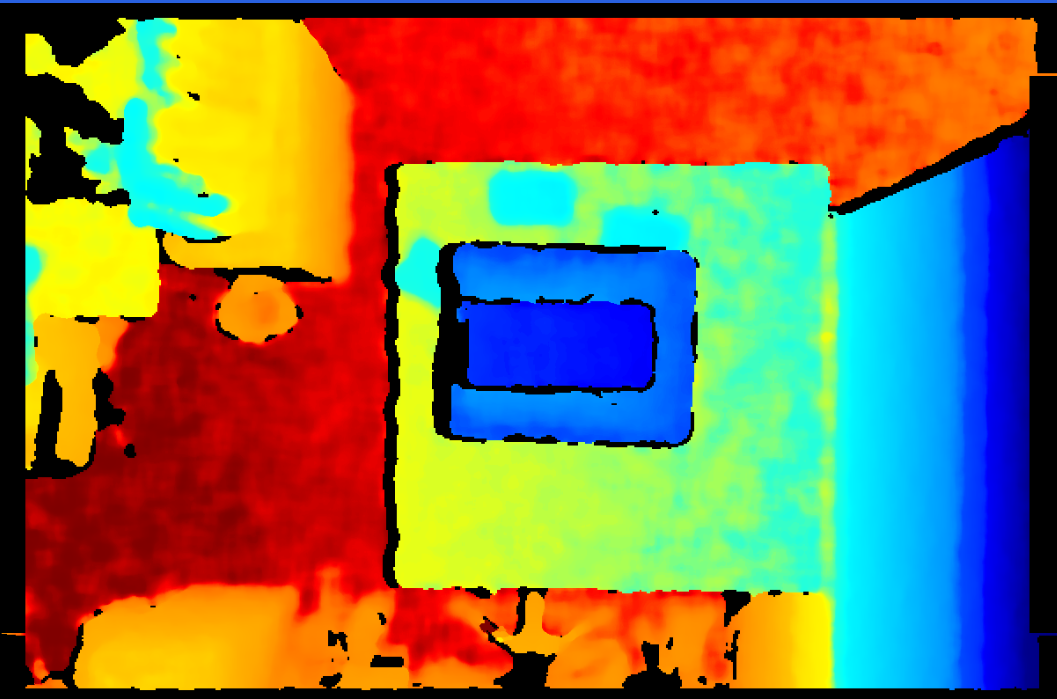
2.2 引导滤波(Guided Filter)
- 原理:利用引导图像(如RGB图像)的结构信息指导深度滤波
- 数学模型:假设输出与引导图像在局部窗口内呈线性关系
qi=akIi+bk,∀i∈ωkq_i = a_k I_i + b_k, ∀i ∈ ω_kqi=akIi+bk,∀i∈ωk
其中a_k和b_k通过最小化平方误差求得
- 优势:
- 边缘保留能力优于双边滤波
- 具有线性时间复杂度(O(N))
- 可证明的边缘保持性和保真性
- 应用:常用于RGB-D相机的深度图优化(如Kinect Fusion)
2.3 边缘感知滤波网络(Deep Edge-Aware Filtering)
- 架构设计:
- 编码器-解码器结构提取多尺度特征
- 边缘检测分支显式预测深度边缘
- 注意力机制在边缘区域降低平滑强度
- 训练策略:
- 多任务损失:深度重建损失 + 边缘检测损失
- 对抗训练:引入判别器区分滤波结果与真实高质量深度图
- 优势:
- 能学习复杂场景下的边缘模式
- 对弱纹理区域的边缘有更好的保持能力
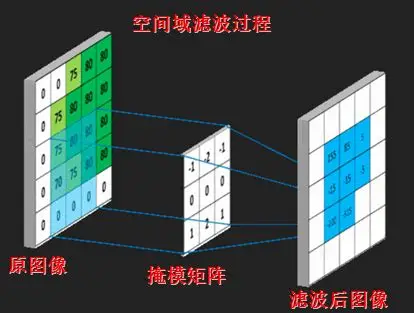
三、空域滤波:邻域信息融合
3.1 基于窗口的空域滤波
- 盒滤波(Box Filter):
- 原理:用固定大小窗口内的平均值替代当前像素值
- 优势:计算高效(可通过积分图加速)
- 缺点:模糊边缘,不适用于深度图像
- 高斯窗口滤波:
- 原理:基于高斯核的加权平均,离中心越近权重越大
- 优势:平滑效果更自然,对噪声有更好的抑制能力
- 自适应窗口滤波:
- 原理:根据局部区域的方差或梯度动态调整窗口大小
- 实现:在平滑区域使用大窗口,在边缘区域使用小窗口
- 优势:平衡噪声抑制和边缘保持
3.2 基于图的空域滤波
- 超像素分割辅助滤波:
- 步骤:
- 将深度图像分割为超像素区域
- 在每个超像素内部进行一致性滤波
- 跨超像素边界进行边缘保持处理
- 优势:利用语义信息指导滤波,提高区域一致性
- 步骤:
- 条件随机场(CRF):
-
建模:将深度滤波视为能量最小化问题
E(D)=∑iψu(Di)+∑i,jψp(Di,Dj)E(D) = ∑_i ψ_u(D_i) + ∑_{i,j} ψ_p(D_i,D_j)E(D)=∑iψu(Di)+∑i,jψp(Di,Dj)
-
一元项:数据项,惩罚与观测深度的偏差
-
二元项:平滑项,鼓励相邻像素深度相似但保留边缘
-
求解:图割(Graph Cuts)或信念传播(Belief Propagation)
-
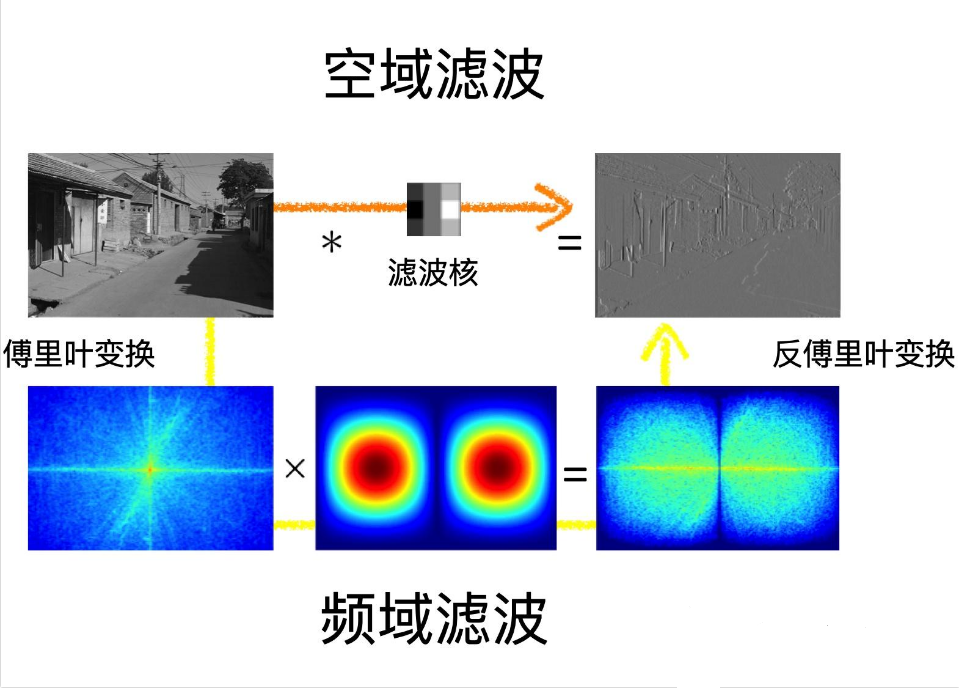
3.3 频域滤波方法
- 低通滤波:
- 原理:通过傅里叶变换将图像转换到频域,保留低频成分
- 应用:去除高频噪声
- 局限性:会模糊所有高频信息,包括边缘
- 带通滤波:
- 原理:保留特定频率范围的成分
- 应用:去除特定频率的周期性噪声(如结构光的条纹噪声)
四、时域滤波:时间序列平滑
4.1 帧间一致性滤波
- 移动平均滤波:
- 公式:Dt=1N∑i=0N−1Dt−iD_t = \frac{1}{N} \sum_{i=0}^{N-1} D_{t-i}Dt=N1∑i=0N−1Dt−i
- 优势:简单有效,减少随机噪声
- 缺点:引入时间延迟,对快速运动物体不适用
- 指数加权移动平均(EWMA):
- 公式:Dt=αDt−1+(1−α)DtobsD_t = αD_{t-1} + (1-α)D_{t}^{obs}Dt=αDt−1+(1−α)Dtobs
- 参数:α∈[0,1],控制历史帧权重
- 优势:对近期帧赋予更高权重,响应速度更快
- 变种:自适应EWMA(根据运动状态调整α)
4.2 卡尔曼滤波(Kalman Filter)
- 状态空间模型:
- 状态转移:xt=Ftxt−1+wtx_t = F_t x_{t-1} + w_txt=Ftxt−1+wt
- 观测方程:zt=Htxt+vtz_t = H_t x_t + v_tzt=Htxt+vt
- 其中x_t为隐藏状态(深度值),z_t为观测值
- 递归估计步骤:
- 预测:基于上一状态预测当前状态
- 更新:结合当前观测值修正预测
- 优势:最优线性无偏估计,能处理动态系统
- 应用:机器人导航中的深度数据融合
4.3 光流辅助的时域滤波
- 原理:利用光流估计帧间对应关系,在对应区域进行滤波
- 实现步骤:
- 计算相邻帧间的光流场
- 根据光流将历史帧的深度值 warp 到当前帧
- 在对应区域进行时空一致性滤波
- 优势:对动态场景有更好的适应性,减少运动模糊
- 局限性:光流计算误差会传播到深度滤波结果中
五、填洞滤波:修复缺失数据
5.1 基于传播的填洞方法
- 扩散方程法:
- 原理:基于热扩散方程,从空洞边缘向内部扩散有效深度值
- 数学模型:∂D∂t=∇⋅(g(∣∇D∣)∇D)\frac{\partial D}{\partial t} = \nabla \cdot (g(|\nabla D|) \nabla D)∂t∂D=∇⋅(g(∣∇D∣)∇D)
- 其中g为扩散系数,在边缘处抑制扩散,在平滑区域促进扩散
- 快速行进法(Fast Marching Method):
- 原理:基于Eikonal方程,从已知区域向未知区域推进
- 优势:保证最短路径传播,避免填充不合理的长距离路径
- 局限性:
- 对大空洞填充效果有限
- 无法恢复遮挡区域的真实深度
5.2 基于几何先验的填洞方法
- 平面拟合:
- 原理:假设空洞区域由局部平面组成,通过周围点拟合平面参数
- 应用:室内场景(墙面、地面等平面结构)
- 曲面插值:
- 方法:双三次插值、径向基函数插值等
- 优势:能拟合复杂曲面,但对非连续表面效果差
- 基于深度学习的几何先验:
- 预训练网络提取几何特征(如平面、圆柱体等)
- 利用几何约束指导空洞填充
5.3 基于RGB信息的深度补全
- 多模态融合方法:
- 从RGB图像中提取语义和几何线索
- 利用这些线索指导深度空洞填充
- 深度学习架构:
- 编码器-解码器结构处理RGB图像
- 跳跃连接融合RGB特征与深度特征
- 注意力机制关注边缘和语义边界
- 典型模型:
- DeepCompletion:结合RGB和稀疏深度生成密集深度图
- DenseDepth:基于单目RGB图像预测深度,用于辅助填洞
六、各向异性滤波:自适应平滑
6.1 各向异性扩散滤波
-
原理:基于热扩散方程,在梯度小的区域扩散快,梯度大的区域扩散慢
-
数学模型:
∂I/∂t=div(g(∣∇I∣)∇I)g(s)=exp(−(s/K)2)或g(s)=1/(1+(s/K)2)∂I/∂t = div(g(|∇I|)∇I) g(s) = exp(-(s/K)²) 或 g(s) = 1/(1+(s/K)²)∂I/∂t=div(g(∣∇I∣)∇I)g(s)=exp(−(s/K)2)或g(s)=1/(1+(s/K)2)
-
参数影响:
- K:控制边缘敏感度,K越小越容易保留边缘
-
优势:自适应地平滑噪声,同时保护边缘
-
局限性:
- 参数选择敏感,需根据场景调整
- 迭代求解计算复杂度高
6.2 基于结构张量的各向异性滤波
- 原理:利用结构张量分析局部区域的主方向,沿主方向进行平滑
- 步骤:
- 计算局部梯度
- 构建结构张量 J=∇I∇ITJ = ∇I∇I^TJ=∇I∇IT
- 特征分解获取主方向和次方向
- 沿主方向进行更强的平滑
- 优势:对线性结构(如墙面、管道)有良好的保持效果
- 应用:工业检测中的表面缺陷检测
6.3 自适应各向异性滤波网络
- 架构设计:
- 特征提取模块分析局部结构
- 方向预测模块估计各向异性方向
- 滤波模块根据预测方向进行自适应平滑
- 训练策略:
- 使用合成数据(含噪声和已知地面真值)
- 对抗训练增强滤波结果的真实感
- 优势:能学习复杂场景下的各向异性模式,适应性更强
工程实践与评价指标
8.1 实时性优化策略
- 算法层面:
- 使用可分离卷积降低计算复杂度
- 设计轻量级网络架构(如MobileNet系列)
- 采用近似算法(如快速双边滤波)
- 硬件加速:
- GPU并行计算(如CUDA实现)
- FPGA/ASIC定制加速(适合特定算法)
- 边缘计算设备部署(如Jetson系列)
8.2 评价指标体系
- 定量指标:
- 均方误差(MSE):1N∑i=1N(Di−Digt)2\frac{1}{N} \sum_{i=1}^{N} (D_i - D_i^{gt})^2N1∑i=1N(Di−Digt)2
- 绝对相对误差(Abs Rel):1N∑i=1N∣Di−Digt∣Digt\frac{1}{N} \sum_{i=1}^{N} \frac{|D_i - D_i^{gt}|}{D_i^{gt}}N1∑i=1NDigt∣Di−Digt∣
- 阈值精度(Threshold Accuracy):如δ<1.25的像素比例
- 边缘F1分数:边缘检测结果的精确率和召回率的调和平均
- 定性指标:
- 视觉质量:滤波后的深度图是否符合人类视觉感知
- 边缘保持度:物体边界是否清晰,有无过度平滑
- 空洞填充合理性:填充区域是否符合场景几何
- 动态稳定性:时间序列中深度值是否稳定
8.3 开源工具与框架
- OpenCV:提供双边滤波、中值滤波、高斯滤波等传统滤波器的高效实现
- PCL(Point Cloud Library):针对点云数据的滤波模块(如统计离群点滤波、半径滤波)
- TensorFlow/PyTorch:基于深度学习的深度滤波网络实现(如DenseDepth、DeepCompletion)
- Intel OpenVINO:优化深度学习模型在Intel硬件上的部署,加速实时处理
应用场景与挑战
9.1 主要应用领域
- 增强现实(AR):实现虚拟物体与真实场景的正确融合
- 机器人导航:提供精确的环境深度信息,支持避障和路径规划
- 工业检测:高精度三维测量和缺陷检测
- 自动驾驶:辅助LiDAR进行环境感知,补充近距离深度信息
- 人机交互:手势识别、动作捕捉等自然交互方式
9.2 当前挑战与未来方向
- 复杂环境适应性:在强光、多径反射、透明物体等场景下的鲁棒性
- 多模态融合:有效整合RGB、深度、LiDAR、IMU等多源数据
- 自监督与无监督学习:减少对昂贵标注数据的依赖,利用几何约束进行训练
- 神经辐射场(NeRF)启发的滤波:结合隐式场景表示进行深度优化
- 实时边缘计算:在低功耗设备上实现高精度实时滤波