之前标定过很多ROS相机,但是生活中的相机如摄像头、手机相机往往并不能以ROS包的数据进行数据采集。
标定板准备
校准图案生成
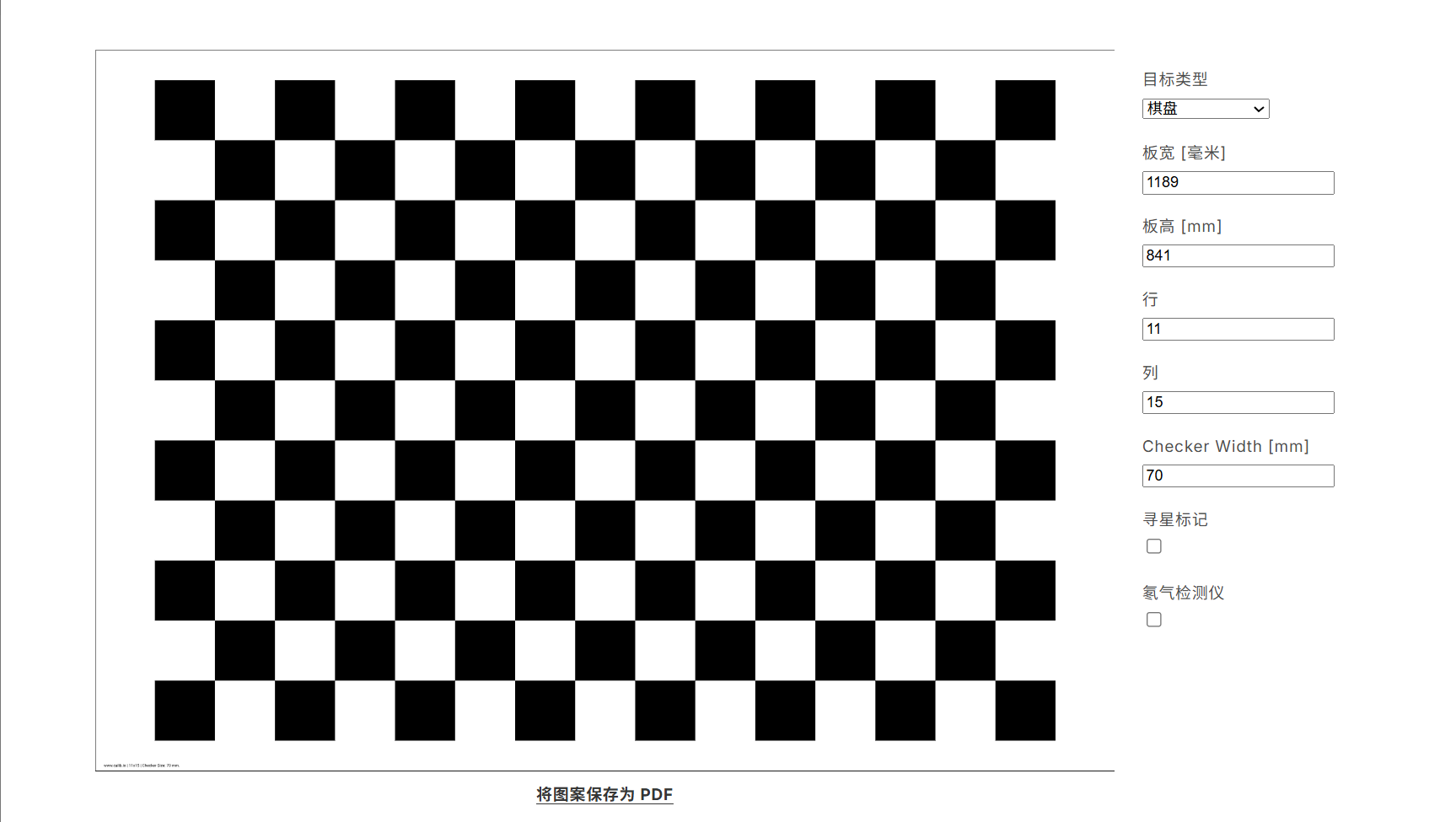
内参标定一般选用棋盘格即可。(棋盘格适用matlab,April格实用kalibr联合标定)。
宽、高结合打印纸张确定,纸张越大标定效果越好。
A0、A1的纸张尺寸见下表。
A0: 841mm x 1189mm
A1: 594mm x 841mm
生成标定图案之后,将图案平整的贴在亚克力板或者是墙面。
Matlab视觉内参标定过程
(1)选择Matlab相机标定包

(2)输入图像