2D视觉系统标定流程与关键要求
一、视野与标定板尺寸选择
首先要确定相机的视野大小,根据相机视野的大小选择合适大小的标定板。标定板太小会导致拍照次数增加,覆盖范围不足;标定板太大则可能视野覆盖不全,无法完整提取标定点,甚至会引入边缘畸变误差。因此,合理选择标定板的尺寸,是确保标定效率和精度的第一步。
一般建议标定板的物理尺寸为视野的 1/3~1/2 左右。例如视野是 200×180mm,标定板可选择 60~90mm 大小。此范围既能保证图像中有足够的标定信息,又避免标定板超出图像范围无法识别。
此外,在选择标定板图案时,应根据所用算法兼容性选择合适形式,如棋盘格或圆点阵列。圆点阵列对图像噪声和畸变具有更强的鲁棒性,在工业级系统中广泛应用。
二、标定板制作精度要求
标定板的精度,指的是实际制作的标定板是否严格符合设计规范,尤其是标定点的几何关系。以 Halcon 提供的标定板制作程序为例:
gen_caltab (7, 7, 0.02, 0.5, 'caltab.descr', 'caltab.ps')
该命令生成一个 7×7 的圆点阵列,标定板中相邻黑色圆的圆心距应为 0.0125 米(12.5mm)。
若实际制作出的标定板,其圆心距偏离 0.0125m 的误差过大,将直接导致相机内参估计偏差,严重影响后续测量精度。
因此,标定板打印时应使用高精度设备,禁止缩放输出或自动适配页面功能,必须设置为1:1真实尺寸输出。常规家用打印设备由于存在热缩、挤压、走纸偏移等问题,难以满足高精度需求。推荐选择专业厂家制作玻璃或金属材质的工业标定板,其热稳定性、平整性和加工精度更能满足丝级测量的需求。
在实际应用中,标定板的制作精度建议达到 0.01mm(丝级)以内,尤其是在对测量误差要求严格的精密定位和尺寸测量系统中,这一要求至关重要。
三、标定图像采集的要求
(1)覆盖整个视野区域
标定图像应充分覆盖相机的整个成像视野,确保系统能够在全视野范围内建立准确的几何映射关系。推荐借助 Halcon 标定助手等辅助工具,对图像分布进行质量检测。
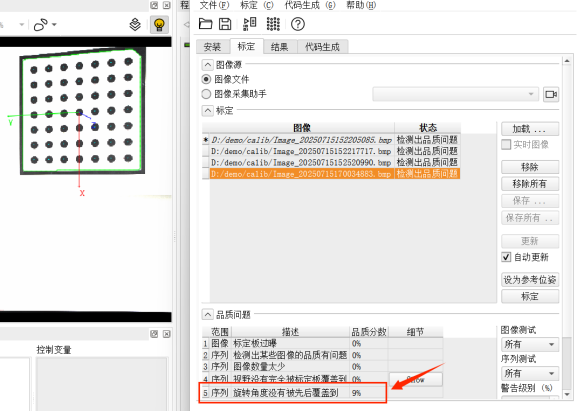
当图像加载至助手后,如出现 视野没有完全被标定板覆盖 的提示,说明标定图像在某些区域存在缺失。此时点击 show 按钮可在左侧视图中查看覆盖情况,其中绿色区域表示已被覆盖,红色区域表示未被覆盖。
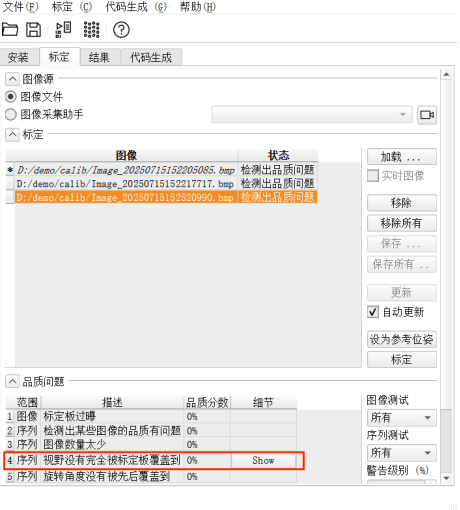
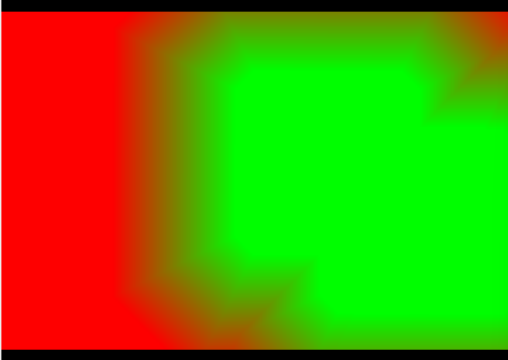
通常,需确保标定板至少出现在图像的中心、四个角、四条边等典型位置,并且覆盖范围略有重叠,以消除视野边缘可能存在的畸变不确定性。
(2)包含旋转和倾斜角度的图像
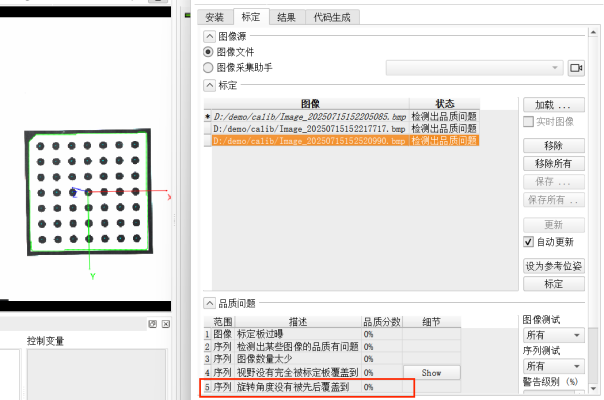
为了提高标定模型对图像畸变和姿态变化的拟合能力,采集过程中需有意识地使标定板产生一定的旋转和倾斜。
例如,通过改变标定板的姿态,使其绕 X、Y、Z 三个轴分别形成一定角度,与相机产生夹角,可以有效增强标定算法对不同视角和深度变化的建模能力。
在 Halcon 标定助手中,如提示旋转角度没有被先后覆盖到,说明图像中缺少足够的姿态变化信息。此时应补充包含倾斜和旋转角度的图像。经验上,一般倾斜图像需覆盖以下区域:
- 四个角(左上、右上、左下、右下);
- 四条边(上、下、左、右);
- 图像中心;
此外,标定板的旋转角度不应局限于单一方向,建议每次拍照时将其旋转一定角度(如每次旋转15°~30°),以构建完整的投影空间模型。
通过这种空间分布+姿态变化的组合策略,可有效增强标定系统的稳健性与泛化能力。
(3)采集图像数量
一般来说,在标定板尺寸选择合理的前提下,采集 12~18 张图像即可满足系统标定的需求。
图像数量并非越多越好,而应保证每张图像均具有实际价值,包括:
- 不同位置分布;
- 不同旋转和倾斜角度;
- 不同尺寸缩放(可轻微调整拍摄距离);
每一张图像的作用是“增加空间中一个有差异的数据点”,从而让标定结果更具准确性和鲁棒性。
四、图像评估与品质反馈
在完成图像采集后,建议使用 Halcon 标定助手对图像进行评估。若图像覆盖区域、旋转角度、倾斜姿态均满足要求,助手界面中的相关品质提示将全部消除,仅可能保留一项提示为:
检测出某些图像的品质问题
该提示多数情况下可忽略,原因可能包括:
- 图像略有模糊;
- 光照不均;
- 标定板边缘轻微遮挡;
- 图像中仅部分标定点被识别;
只要总体标定分数稳定、误差控制在目标范围内(如 0.05~0.1 像素以内),即可判定标定质量合格。
五、确保丝级测量精度的控制要点
当按上述流程标定完成后,测量精度达到丝级(0.01mm)通常问题不大。为进一步保障测量系统性能,建议控制以下关键点:
| 控制维度 | 要求与建议 |
|---|---|
| 标定板精度 | 使用高质量工业级标定板,圆心距误差 ≤0.01mm |
| 图像采集分布 | 覆盖视野中心、边缘、角落;保证倾斜与旋转 |
| 光照环境 | 均匀稳定,避免反光与阴影遮挡 |
| 镜头与安装 | 使用定焦镜头,安装固定、防振,防止重标定 |
| 标定算法 | 使用Halcon/OpenCV等成熟算法,启用畸变建模 |
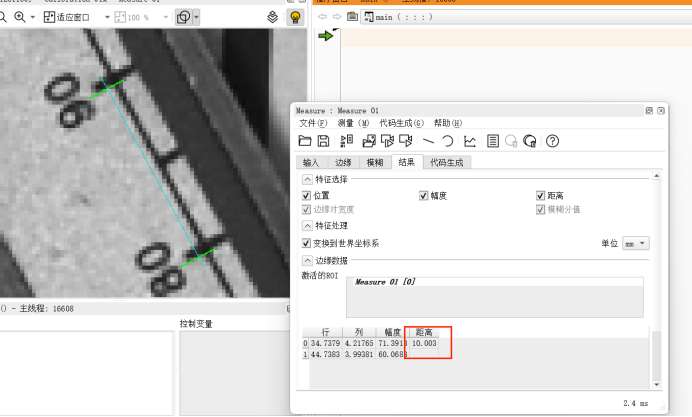
| 标定验证 | 使用量块、实物尺寸或对位验证进行精度校验 |
六、结语
2D视觉系统的高精度标定是一项系统性工程,涉及标定板制作、图像采集、姿态控制、误差建模、软件算法等多个环节。只要在每个环节中严格按照上述要求操作,标定系统通常能实现0.01mm级别的稳定测量精度。
如配合进一步的标定残差评估、精度验证流程,甚至可将系统测量能力扩展至亚像素级应用中,满足工业检测、精密定位、自动化装配等多种高要求场景。