厂区车辆导航系统:基于 GPS+AI 动态路径规划的技术实现与实践
本文面向厂区 IT 运维工程师、厂区物流系统开发的技术同行们,解决厂区内车辆定位漂移、路径规划僵化导致周转效率低下的问题,拆解 GPS+AI 技术如何解决这些痛点,为同类场景开发提供参考。
如需获取厂区车辆导航系统解决方案请前往文章最下方获取,如有项目合作及技术交流欢迎私信作者。
一、厂区车辆导航系统核心技术概述
厂区车辆导航系统的核心竞争力在于 “高精度定位 + 智能决策” 的技术融合,其底层技术架构可概括为:
GPS + 北斗融合定位技术
采用双模卫星定位结合厂区蓝牙 Beacon 信标补充,解决高大厂房、密集设备导致的信号遮挡问题,实现亚米级实时定位,为导航与调度提供精准位置基准。AI 动态决策算法体系
包含三大核心算法:- 路径规划算法(Dijkstra 与 A * 混合模型):基于厂区电子地图数据(含道路、禁行区、作业区属性),结合实时交通状态动态生成最优路线;
- 任务调度算法:通过分析车辆载重、位置、空闲时长及订单优先级,实现智能派单与任务分配;
- 异常预测模型:基于历史数据与实时参数(如车辆速度、作业区占用率),提前预警拥堵、设备故障等潜在风险。

二、核心模块讲解
(一)多源定位融合模块
功能:解决厂区复杂环境下的定位稳定性问题。
技术实现:
- 硬件层面:车载终端集成 GPS / 北斗芯片与蓝牙接收模块,同步采集卫星信号与 Beacon 信标(部署于仓库入口、十字路口等关键节点)数据;
- 软件层面:通过卡尔曼滤波算法对多源数据进行融合,过滤噪声干扰,当卫星信号强度<-120dBm 时,自动切换为 “Beacon 三角定位 + 惯导补盲” 模式,确保定位连续性。
代码片段:多源定位数据融合过滤逻辑
def fusion_position(gps_data, beacon_data, imu_data):# 初始化滤波参数kalman_filter = KalmanFilter(dim_x=4, dim_z=2)# 卫星信号强度判断if gps_data['signal_strength'] < -120:# 切换至Beacon+惯导模式z = beacon_data['position']kalman_filter.update(z + imu_data['offset'])else:# GPS+北斗融合模式z = (gps_data['position'] +北斗_data['position']) / 2kalman_filter.update(z)return kalman_filter.predict() # 输出融合后定位结果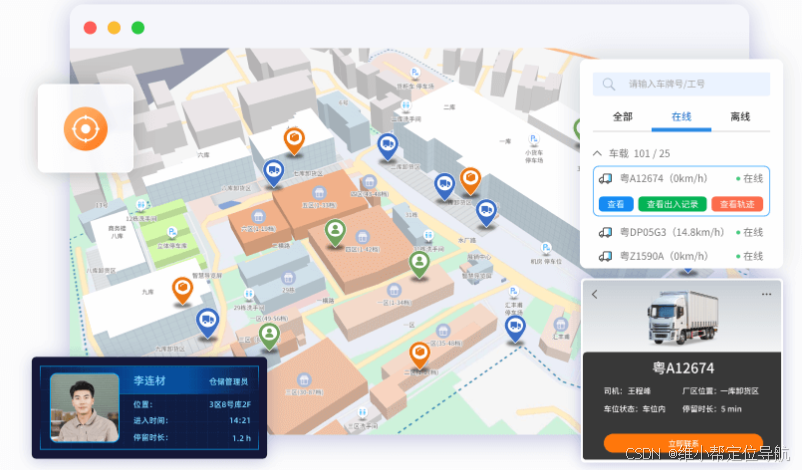
(二)AI 路径规划与调度模块
功能:实现车辆路线动态优化与任务智能分配。
技术细节:
- 电子地图预处理:将厂区地图栅格化,标记道路权重;
- 实时路径计算:A * 算法引入 “时间成本因子”(拥堵路段通行时间 ×1.5 倍),每 30 秒基于车辆密度、作业区占用状态刷新路线;
- 任务调度逻辑:采用贪心算法优先分配 “距离最近 + 载重匹配” 的车辆,减少空驶。
代码示例:A * 算法在路径规划中的简化实现(如何引入 “时间成本权重” 计算最优路径)
import heapqclass AStarPlanner:def __init__(self, grid, cost=10, heuristic_weight=1.5):self.grid = grid # 厂区网格地图(0为可通行,1为障碍物)self.cost = cost # 基础通行成本self.heuristic_weight = heuristic_weight # 拥堵区域权重系数def heuristic(self, node, goal):# 曼哈顿距离作为启发函数,适配厂区矩形道路return self.heuristic_weight * abs(node[0] - goal[0]) + abs(node[1] - goal[1])def plan(self, start, goal, congestion_areas):# congestion_areas:实时拥堵区域列表[(x1,y1), (x2,y2)...]open_heap = []heapq.heappush(open_heap, (0, start[0], start[1]))closed_set = set()came_from = {}g_score = { (start[0], start[1]): 0 }f_score = { (start[0], start[1]): self.heuristic(start, goal) }while open_heap:_, x, y = heapq.heappop(open_heap)current = (x, y)if current == goal:# 回溯生成路径path = []while current in came_from:path.append(current)current = came_from[current]return path[::-1]if current in closed_set:continueclosed_set.add(current)# 遍历上下左右四个方向for dx, dy in [(-1,0), (1,0), (0,-1), (0,1)]:nx, ny = x + dx, y + dyif 0 <= nx < len(self.grid) and 0 <= ny < len(self.grid[0]) and self.grid[nx][ny] == 0:# 若在拥堵区域,增加通行成本if (nx, ny) in congestion_areas:tentative_g = g_score[current] + self.cost * 1.5else:tentative_g = g_score[current] + self.costif (nx, ny) not in g_score or tentative_g < g_score[(nx, ny)]:came_from[(nx, ny)] = currentg_score[(nx, ny)] = tentative_gf_score[(nx, ny)] = tentative_g + self.heuristic((nx, ny), goal)heapq.heappush(open_heap, (f_score[(nx, ny)], nx, ny))return None # 无可用路径
(三)动态交通地图与语义交互模块
功能:提供全局可视化监控与高效人机交互。
- 动态交通地图:实时渲染厂区道路、车辆位置、作业区状态,支持点击查询车辆详情(如载重、任务进度);
- AI 语义导航:集成语音识别模型,能深度分析司机自然语言需求,比如支持 “去 3 号仓库卸急件” 等自然语言指令解析,快速匹配司机需求。

三、性能优化与挑战
(一)已落地的优化措施
- 算法效率提升:路径规划算法引入 “局部路网缓存” 机制,计算耗时从 500ms 缩短至 100ms 以内;
- 终端适配:针对老旧车载终端,开发轻量化 SDK(体积<50MB),降低硬件升级成本。
(二)现存技术挑战
- 极端环境适应性:暴雨、粉尘天气可能导致 Beacon 信号衰减,需测试毫米波雷达辅助定位方案;
- 多车协同决策:高峰时段(如上下班、集中卸货)多车路线冲突概率增加,需优化群体智能决策模型;
- 数据安全:车辆轨迹与调度数据属于敏感信息,需强化边缘计算节点的数据加密与权限管理。
总结
厂区车辆导航的核心不是 “让车能导航”,而是 “让导航适配厂区复杂场景”。通过 GPS + 北斗融合定位解决 “定不准”,通过 AI 动态路径规划解决 “走不对”,通过语义交互解决 “用不顺”,才能真正提升车辆周转效率。
如需厂区车辆导航系统解决方案可前往↓