【卡尔曼滤波第六期】集合变换卡尔曼滤波 ETKF
目录
- 集合变换卡尔曼滤波概述
- 一、原理概述
- 二、数学原理
- 三、ETKF 实现步骤总结
- MATLAB实现案例
- 参考
集合变换卡尔曼滤波(Ensemble Transform Kalman Filter, ETKF)是一种基于集合的贝叶斯滤波方法,是集合卡尔曼滤波(Ensemble Kalman Filter, EnKF)的一个变种。它主要用于处理高维、非线性系统中的状态估计问题,在大气科学、海洋模拟、机器人导航等领域有广泛应用。
集合变换卡尔曼滤波概述
一、原理概述
ETKF 与传统 EnKF 的主要不同在于 更新集合成员的方式:
- EnKF:通过对观测值引入扰动,采用蒙特卡洛方法近似后验协方差矩阵。
- ETKF:通过一个 确定性线性变换来更新集合 ,不需要扰动观测值,从而避免了观测噪声引起的额外误差。
ETKF 采用 集合变换(Ensemble Transform) 的方式,将预测集合通过一个线性变换矩阵映射为分析集合。
二、数学原理
假设系统状态为 x∈R^n ,有如下步骤:
1. 初始集合

2. 计算观测空间中的扰动

3. 计算分析扰动的变换矩阵

4. 分析均值更新

5. 构造分析集合
最终分析集合为:

三、ETKF 实现步骤总结
1、初始化:生成状态初始集合。
2、预测步:
- 对每个集合成员进行状态传播。
- 计算预测均值和扰动。
3、观测空间变换:
- 计算预测观测集合。
- 计算观测扰动矩阵。
4、分析步:
- 构造变换矩阵 𝑇。
- 更新扰动和均值。
- 构造分析集合。
5、迭代:用分析集合作为下一时刻的预测集合。
MATLAB实现案例
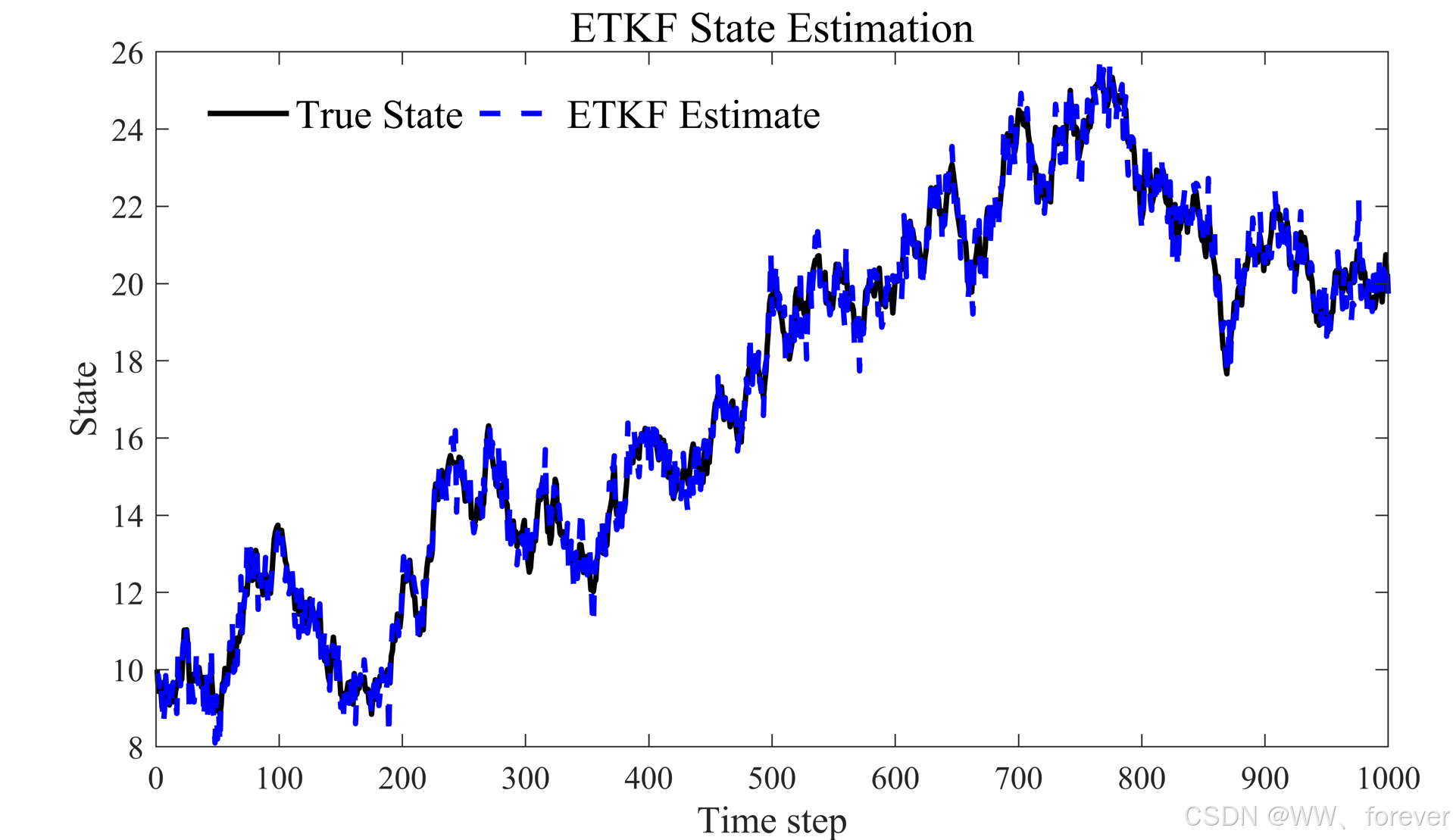
状态演变图形如下:
完整MATLAB代码如下:
% ETKF Demo in MATLAB
close all;
clear;
clc;pathFigure = ".\Figures\";%% Setting
% ---------------------------------------------% Parameters
N = 50; % Ensemble size
n_steps = 1000; % Time steps
Q = 0.1; % Process noise
R = 0.2; % Observation noise% True state
x_true = zeros(1, n_steps);
x_true(1) = 10;% Observations
y = zeros(1, n_steps);% Initial ensemble
Xf = 10 + sqrt(Q) * randn(1, N);% Storage
xa_mean = zeros(1, n_steps);for k = 1:n_steps% True state propagationif k > 1x_true(k) = x_true(k-1) + sqrt(Q) * randn;end% Observationy(k) = x_true(k) + sqrt(R) * randn;% Forecast step: propagate ensembleXf = Xf + sqrt(Q) * randn(1, N);% Forecast mean and perturbationsxf_mean = mean(Xf);Xf_pert = Xf - xf_mean;% Observation of ensembleYf = Xf; % Identity observation operator H=1yf_mean = mean(Yf);Yf_pert = Yf - yf_mean;% Compute transformation matrix TS = (Yf_pert' / sqrt(R)) * (Yf_pert / sqrt(R)) / (N - 1);[U, S, V] = svd(Yf_pert / sqrt(R), 'econ');Lambda = diag(S).^2;T = U * diag(1 ./ sqrt(1 + Lambda)) * U';% Analysis perturbationsXa_pert = Xf_pert * T;% Analysis mean (corrected)dy = y(k) - yf_mean;w = T * T' * (Yf_pert' / R) * dy';xa_mean(k) = xf_mean + Xf_pert * w;% Analysis ensembleXf = xa_mean(k) + Xa_pert;
end% Plot
figure;
grid on;
plot(1:n_steps, x_true, 'k-', 'LineWidth', 2); hold on;
plot(1:n_steps, xa_mean, 'b--', 'LineWidth', 2);
set(gca, 'FontSize', 12, 'FontName', 'Times New Roman');hl = legend('True State', 'ETKF Estimate');
set(hl, 'NumColumns', 2, 'box', 'off', 'FontName', 'Times New Roman', 'FontSize', 15,'Location','north');
xlabel('Time step','FontSize',14,'FontName','Times New Roman');
ylabel('State','FontSize',14,'FontName','Times New Roman');
title('ETKF State Estimation','FontSize',16,'FontName','Times New Roman');
set(gca,'Layer','top');
需要说明的是,版案例是一维系统。
🔥 核心问题:ETKF 在一维系统中退化严重!
ETKF 是为了高维系统设计的滤波器方法,核心思想是在线性子空间中构造正交变换来更新协方差结构,而在 一维系统中,所有扰动结构都是退化的,如下问题就会发生:
- 扰动矩阵 Yf_pert 为 1×N 向量,乘出来的矩阵 S 是 N×N,但其秩最多为 1。
- eye(N) + S 的特征值几乎全为 1,只有一个特征值偏离 1,导致特征分解不稳定。
- T 构造失稳,进一步造成 w = T*T’ * … 爆炸。
所以 - 估计量在第一步就爆炸。