【C++】AVL树
目录
一、AVL树的引入
二、AVL树
🍔AVL树的概念
🍟AVL树节点的定义
🌮AVL树的插入
🥪AVL树的旋转
三、AVL树的验证
四、结语
一、AVL树的引入
🌟我们知道 map/multimap/set/multiset 这几个容器的共同点是:其底层都是按照二叉搜索树来实现
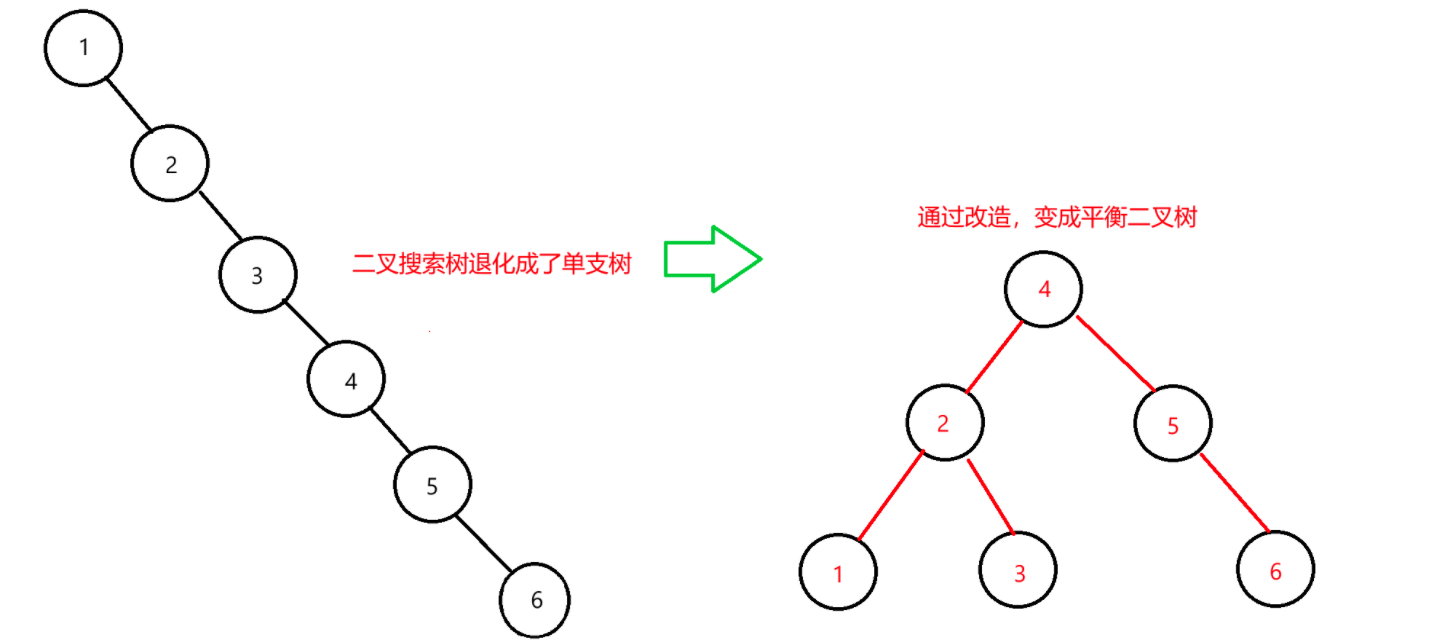
不过二叉搜索树有其自身的缺陷,假如往树中插入的元素有序或者接近有序,二叉搜索树就会退化成单支树,时间复杂度会退化成O(N),因此 map、set等关联式容器的底层结构是对二叉树进行了平衡处理,即采用平衡树来实现
💧接下来我们就一起看看如何实现平衡二叉树的改造:
二、AVL树
🍔AVL树的概念
🌟针对效率降低的问题,两位俄罗斯的数学家G.M.Adelson-Velskii 和E.M.Landis在1962年发明了一种解决的方法:
👉当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1,即可降低树的高度,从而减少平均搜索长度。
AVL树是具有以下性质的二叉搜索树:
1️⃣它的左右子树都是AVL树
2️⃣左右子树高度之差(简称平衡因子)的绝对值不超过1(需要通过调整系欸但
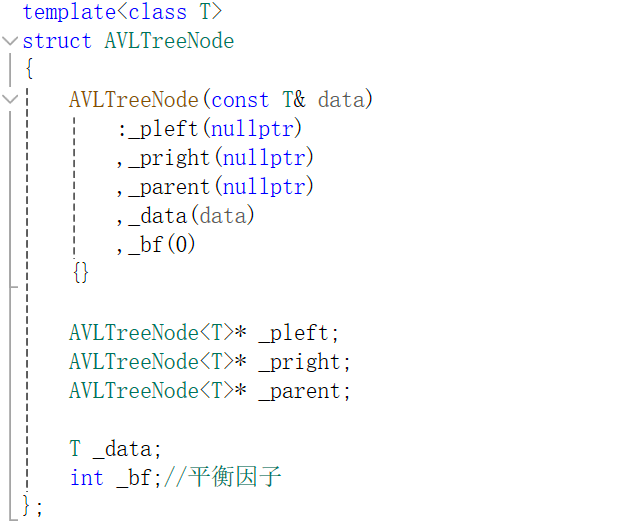
🍟AVL树节点的定义
🌟AVL树节点的定义:
🌮AVL树的插入
AVL树的插入分为两步:
1️⃣按照二叉搜索树的方式插入新节点
2️⃣调整节点的平衡因子
针对平衡因子的调整:
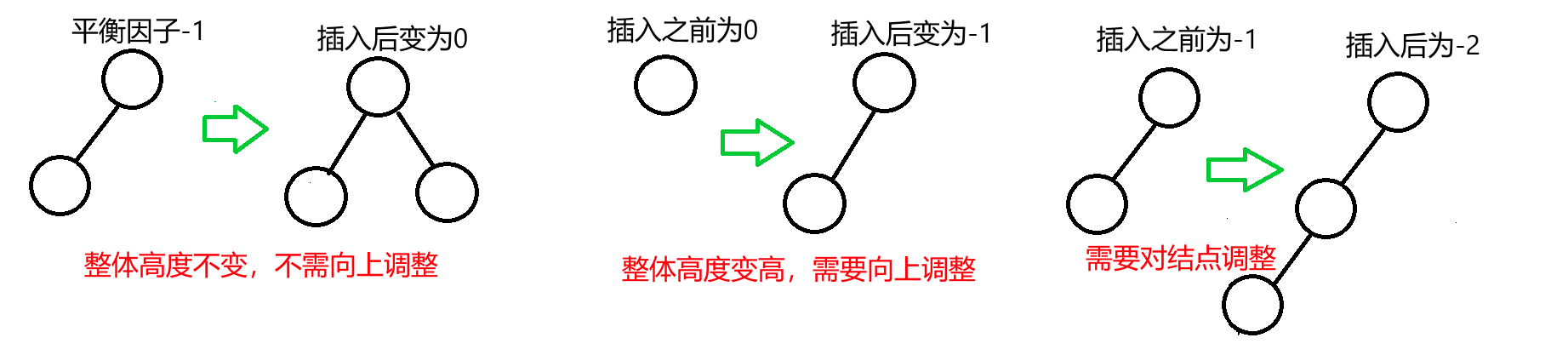
设平衡因子的计算:右子树高度-左子树高度,所以对于一个节点来说:
1️⃣新节点插入到左边,平衡因子 -1
2️⃣新节点插入到右边,平衡因子 +1
插入后,节点的平衡因子可能的情况 0,正负1,正负20:插入之前为正负1,插入后变为0
正负1:插入之前为0,插入后整体的高度变高一层,需要向上更新
正负2:插入之前为正负1,插入后违反了平衡树的性质,需要进行节点位置的调制
bool insert(const T& data) {//按照二叉搜索树的插入规则插入//判断_root是否为空if (!_root)_root = new Node(data);pNode cur = _root;pNode parent = nullptr;while (cur){if (cur->_data > data)cur = cur->_pleft;else if (cur->_data < data)cur = cur->_pright;elsereturn false;}pNode newNode = new Node(data);if (data > parent->_data){parent->_pright = newNode;newNode->_parent = parent;}else{parent->_pleft = newNode;newNode->_parent = parent;}//调整平衡因子while (parent){// 更新双亲的平衡因子if (newNode == parent->_pleft)parent->_bf--;elseparent->_bf++;// 更新后检测双亲的平衡因子if (0 == parent->_bf){break;}else if (1 == parent->_bf || -1 == parent->_bf){newNode = parent;parent = newNode->_parent;}else{if (2 == parent->_bf){// ...}else{// ...}}}return true; }
🥪AVL树的旋转
❗针对平衡因子出现正负2的情况,我们需要进行旋转处理
🌟下面分别讨论不同情况下的旋转:
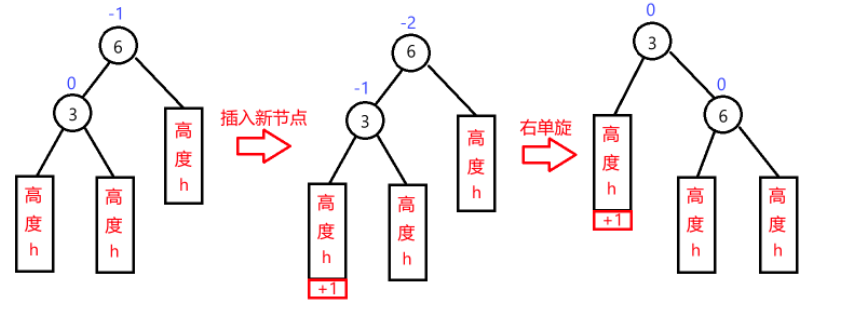
1️⃣新节点插入较高左子树的左侧---左左 : 右单旋
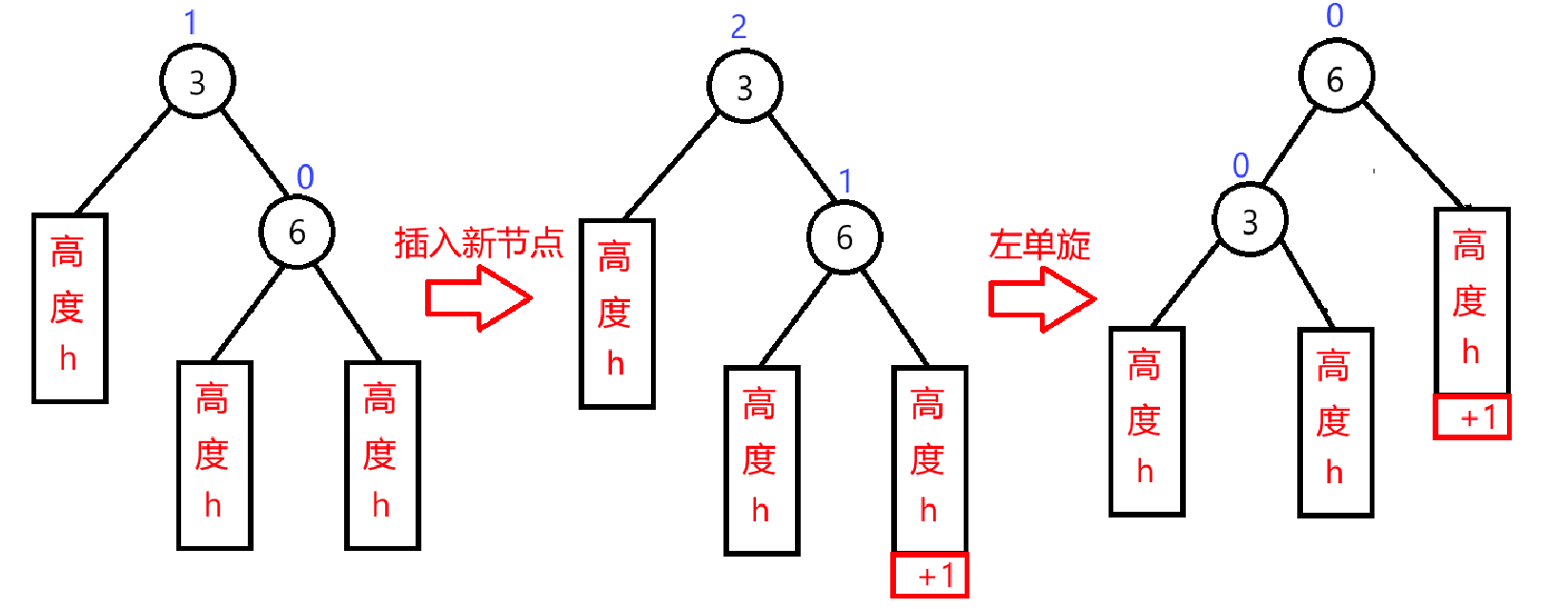
2️⃣新节点插入较高右子树的右侧--右右:左单旋
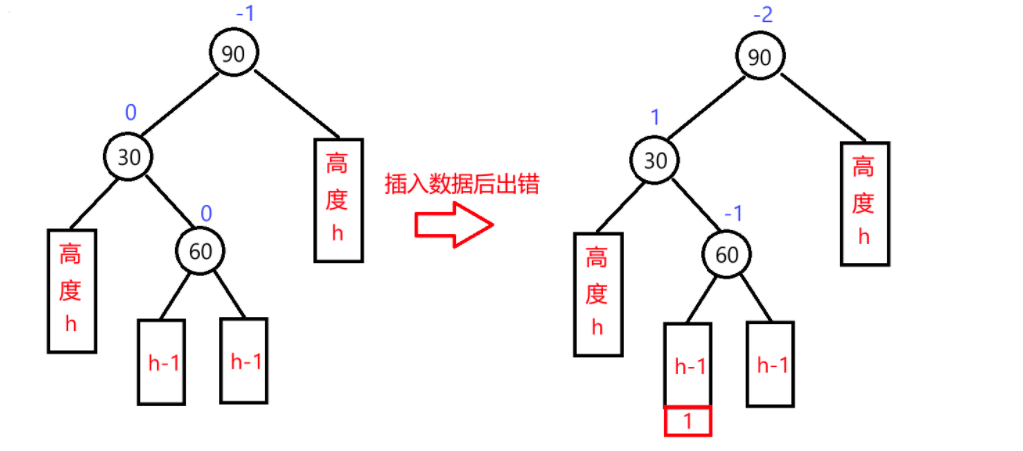
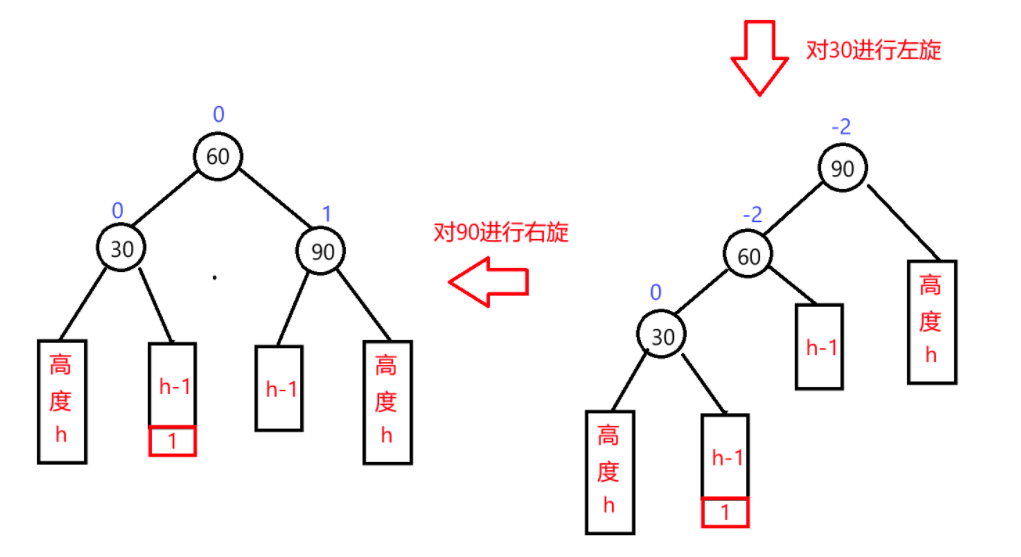
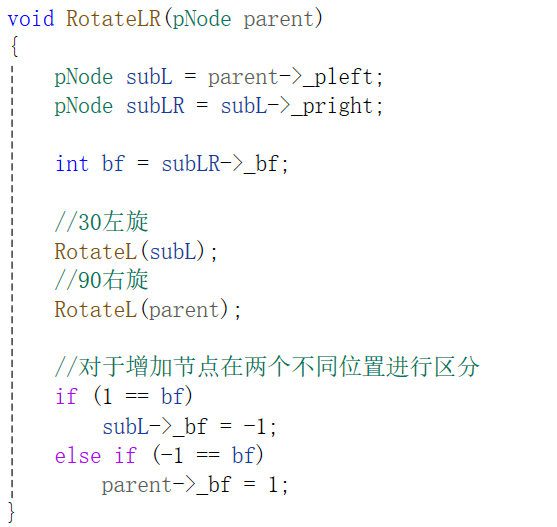
3️⃣新节点插入较高左子树的右侧---左右:先左单旋再右单旋
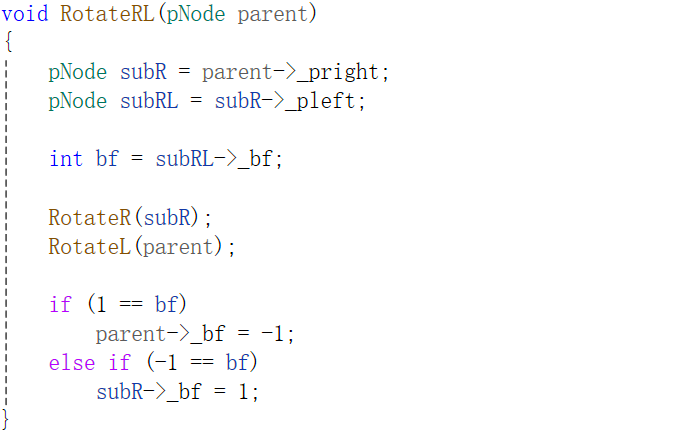
4️⃣新节点插入较高右子树的左侧---右左:先右单旋再左单旋
🔥总结:
假如以parent为根的子树不平衡,即parent的平衡因子为2或者-2,分以下情况考虑
1️⃣parent的平衡因子为2,说明parent的右子树高,设parent的右子树的根为subR
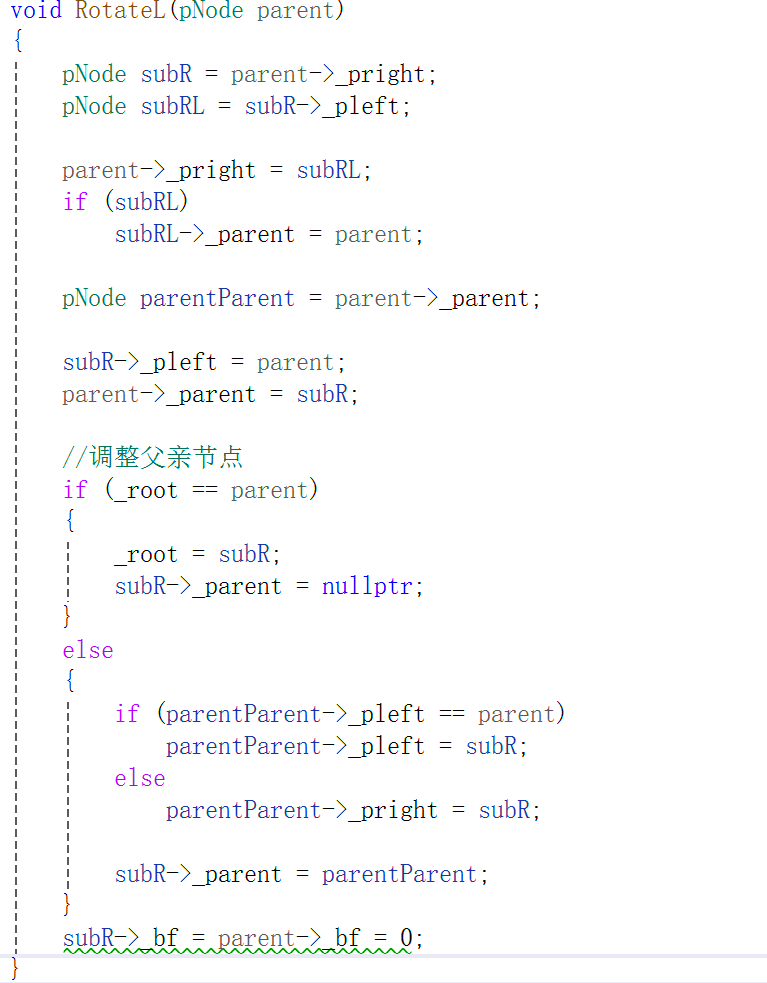
当subR的平衡因子为1时,执行左单旋
当subR的平衡因子为-1时,执行右左双旋
2️⃣parent的平衡因子为-2,说明pParent的左子树高,设parent的左子树的根为subL
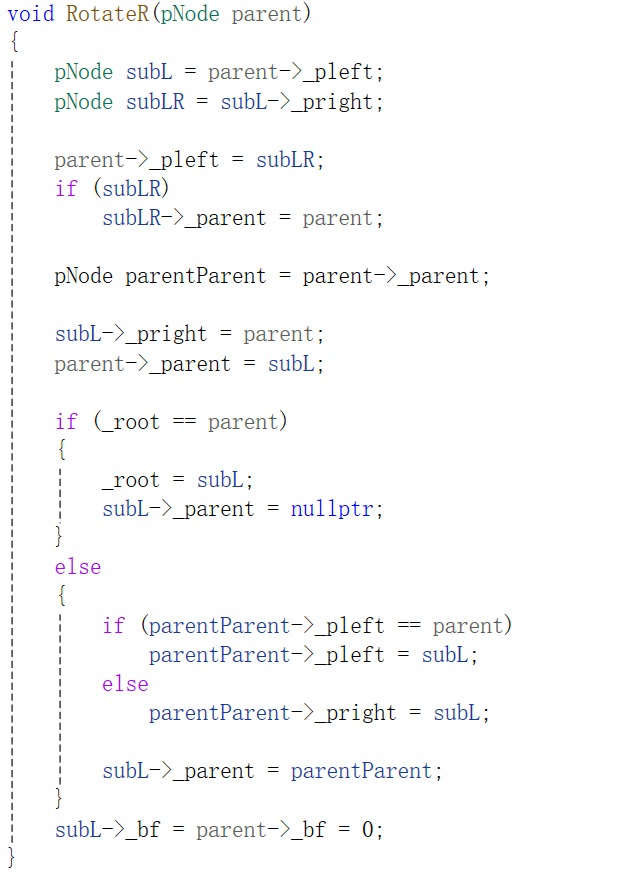
当subL的平衡因子为-1时,执行右单旋
当subL的平衡因子为1时,执行左右双旋
旋转完成后,原parent为根的子树已经平衡,不需要再向上更新
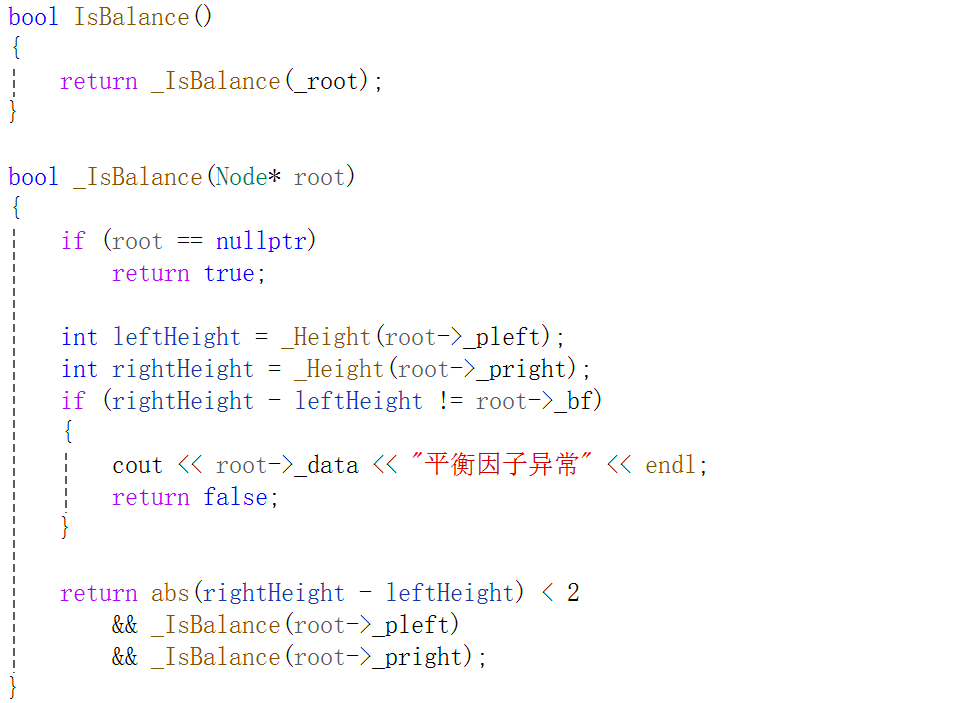
三、AVL树的验证
🌟AVL树是在二叉搜索树的基础上加入了平衡性的限制,因此要验证AVL树,可以分两步:
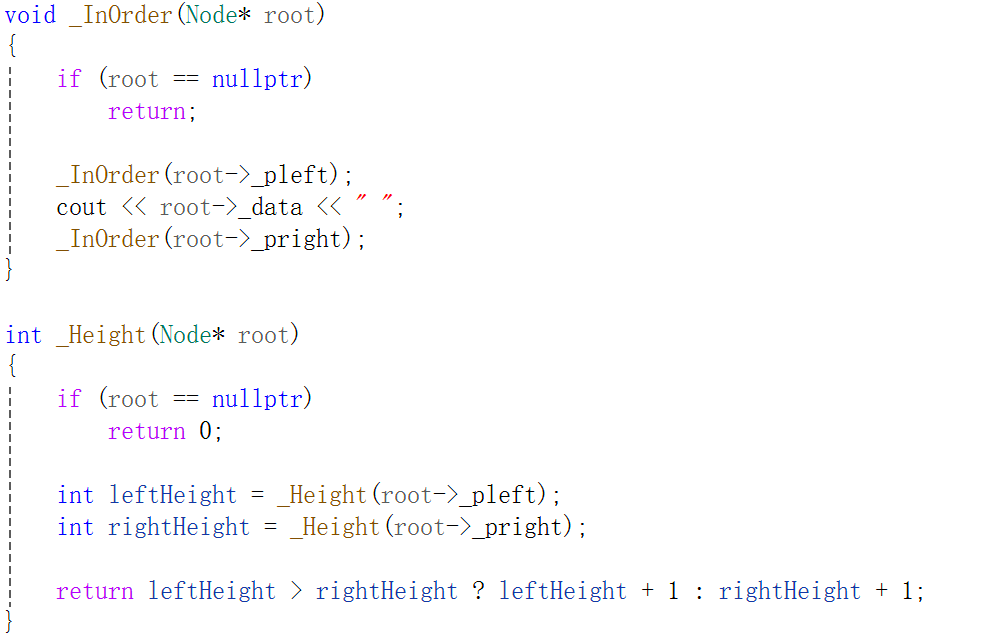
1️⃣验证其为二叉搜索树,如果中序遍历可得到一个有序的序列,就说明为二叉搜索树
2️⃣验证其为平衡树,每个节点子树高度差的绝对值不超过1
提供两个代码供大家验证:void test1() {const int N = 30;vector<int> v;v.reserve(N);//srand(time(0));for (size_t i = 0; i < N; i++){v.push_back(rand());cout << v.back() << endl;}AVLTree<int> t;for (auto e : v){if (e == 14604){int x = 0;}t.insert(e);cout << "Insert:" << e << "->" << t.IsBalance() << endl;}cout << t.IsBalance() << endl;t.InOrder(); }void test2() {//int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };AVLTree<int> t;for (auto e : a){t.insert(e);}int i = 0;t.InOrder();cout << t.IsBalance() << endl;return 0; }
四、结语
🫡你的点赞和关注是作者前进的动力!
🌞最后,作者主页有许多有趣的知识,欢迎大家关注作者,作者会持续更新有意思的代码,在有趣的玩意儿中成长!
