动目标显示处理解析六(重频参差扩展盲速)
在《动目标显示处理理解二(盲速)-CSDN博客》中提到,若雷达发射信号的脉冲重复频率固定,对于二脉冲对消器,当目标产生的多普勒频率等于脉冲的重复频率的整数倍时,二脉冲对消器就会将对应的信号当作多普勒频率为0的地杂波信号进行滤除,如图1所示为二脉冲对消器的幅频响应。
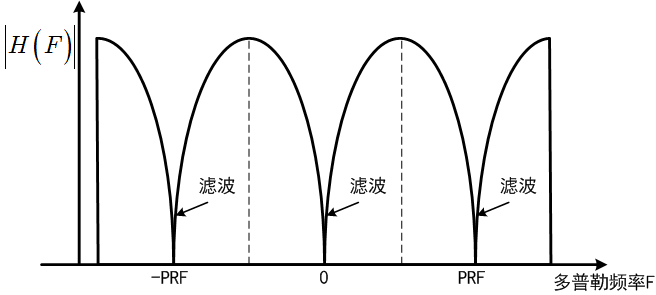
图1 二脉冲对消器的幅频响应
那么对于其他的滤波器,包括递归型滤波器和其他的非递归型滤波器是不是都有这种性质呢?在《动目标显示处理解析五(非递归型滤波器与递归型滤波器)-CSDN博客》中提到,无论是递归型滤波器或者是非递归型滤波器,对于相对地面静止雷达的MTI滤波器的传递函数总可由z变换表示出来,即:,其中
是系数,
是第m个极值点。即MTI滤波器的传递函数的零值点始终是1,以实现滤波器的幅频响应对多普勒频率为0的信号输出为0,即对无多普勒频率的地杂波进行滤波,如图2所示。因此,对于此种滤波器,无论传递函数的极值点如何设置,当回波信号的多普勒频率等于重复频率的整数倍时,即
,总有
,即此时的频率
所对应的z值点与零值点重合,即
,
。也就是说对于任意一种MTI滤波器总会对多普勒频率等于脉冲的重复频率整数倍的回波信号进行滤除,我们将这种现象称为盲速现象,将速度产生的多普勒频率等于脉冲重复频率整数倍的速度称为盲速,将速度产生的多普勒频率等于1倍的脉冲重复频率的速度称为第一盲速。
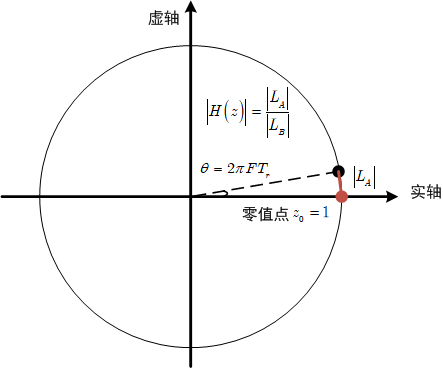
图2 相对地面静止雷达的MTI滤波器零值点设置示意图
对于雷达信号处理来讲,出现盲速现象自然是不讨喜的,这意味着此时的MTI可能会使某些需要测量的目标受到不应该的过滤。特别是当重复频率较小时,其对应的第一盲速可能会是雷达测量主要目标的速度。因此,雷达信号处理中常通过重频参差的方式扩展第一盲速,使得MTI滤波器的盲速均大于雷达测量主要目标的速度量程。所谓重频参差即不保持雷达脉冲之间的重复间隔是恒定的,而是按照一定的规律改变连续脉冲间的重复间隔,如图3所示。
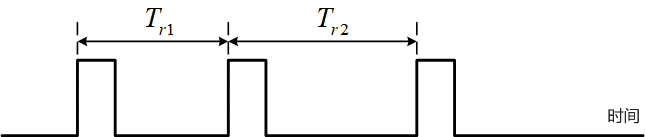
图3 重频参差时域示意图
假设有一两脉冲周期参差的雷达信号,重复周期分别为:和
,且有:
| (1) |
其中,是正整数。对该信号进行地杂波滤除可以经过一个由两个二脉冲对消器并联的MT滤波器,第一层的延时时间为
,第二层的延时时间为
,如图4所示
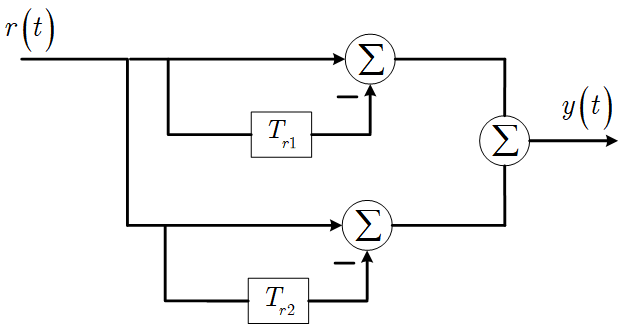
图4 两参差信号的MTI滤波器
根据二脉冲对消器的盲速特性可知,当回波信号的多普勒频率等于频率的整数倍时、即
,第一层的对消器的输出为0;当回波信号的多普勒频率等于频率
的整数倍时、即
,第二层的对消器的输出为0。因此当回波信号的多普勒频率
为
和
的公倍数时,第一层和第二层对消器输出值均为0,整个系统的输出
为0,也就是说此时对应于多普勒频率
的目标速度称为盲速。
注意到公式(1),可以令:
| | (2) |
根据与
互为倒数的关系有:
| | (3) |
由此可知,当互质时,
的最小公倍数
可取到最大:
| (4) |
也即此时的第一盲速对应的多普勒频率为,此时比值
称为参差比,如图5为参差比为4/5的重频参差MTI滤波器的幅频响应对比图,可以看出重频参差的盲速得到了明显的扩展,分别是单一重复频率的盲速的4倍和5倍。
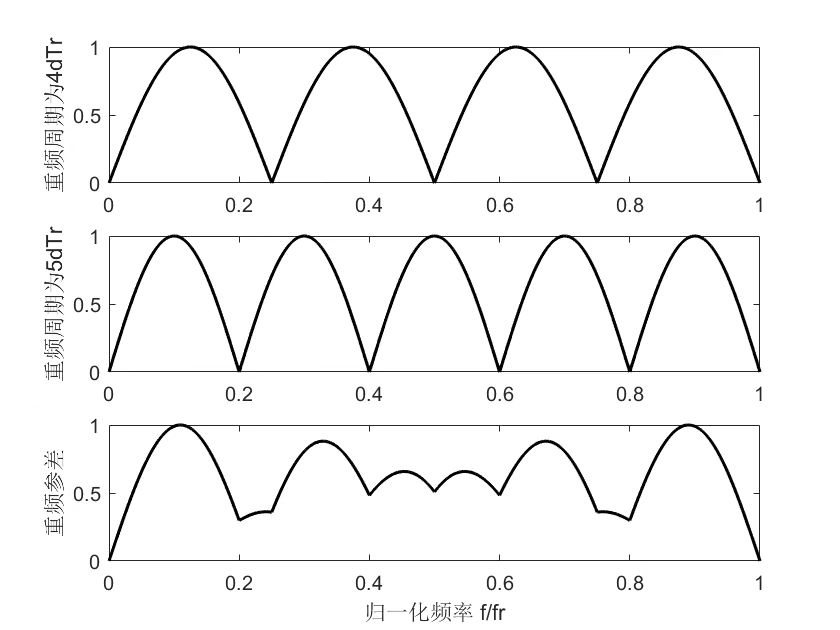
图5 重频参差与常规固定重频的盲速对比